基于譜分析原理和頻率響應(yīng)法的艦船縱搖運動分析
2020-08-29 12:10:18張鈺
數(shù)字海洋與水下攻防 2020年4期
關(guān)鍵詞:分析
張 鈺
(海軍研究院,上海 200235)
0 引言
艦船在海上行駛時,由于受到復(fù)雜海況的影響,會不斷發(fā)生搖蕩運動,尤其是在高海況下,將對艦船的航行安全性、舒適性和作業(yè)能力有著重要影響。其中,縱搖運動指的是船體繞橫軸的回轉(zhuǎn)振蕩運動,是艦船耐波性分析中的一個重要指標(biāo),是造成艦船失速、抨擊、上浪、船體結(jié)構(gòu)損傷和船員暈船的主要原因[1]。為了掌握高海況下艦船的縱搖運動規(guī)律并對其進行準(zhǔn)確預(yù)報,本文將基于譜分析原理和頻率響應(yīng)法對艦船的縱搖運動規(guī)律進行分析。
1 譜分析原理
本文將隨機海浪看作不同單元波的疊加,而單元諧波的組成情況可以用海浪譜來表示。在海浪理論中,譜分析主要應(yīng)用于預(yù)報海浪的運動、確定波浪對物體的響應(yīng)以及模擬波浪運動等方面[2]。
譜密度函數(shù)是運用譜分析原理進行海浪預(yù)報時的重要參考依據(jù),其定義方法如下:
x(t)表示隨機過程,xT(t)為其限定了定義域的函數(shù),并令其滿足:

根據(jù)傅里葉變換,可以將式(1)寫為
其中,本文定義

為雙邊譜密度函數(shù),其定義域為(-∞,∞)。由于譜密度函數(shù)與相關(guān)函數(shù)相互關(guān)聯(lián),其中從頻域角度來描寫隨機過程的為譜密度函數(shù),而從時域角度描寫隨機過程為相關(guān)函數(shù)。由維納-辛欽定理可知,運用傅里葉變換可以實現(xiàn)雙邊譜密度函數(shù)與自相關(guān)函數(shù)的相互轉(zhuǎn)換

然而在實際應(yīng)用中,變量ω?zé)o法實現(xiàn)在(-∞,∞)內(nèi)取值,只能在(0,∞)上對雙邊譜密度函數(shù)進行取值,此時譜密度函數(shù)即為單邊譜密度,二者關(guān)系如下:

本文中研究的譜密度函數(shù)為單邊譜密度函數(shù)。根據(jù)函數(shù)曲線下的面積等于隨機過程的方差這一特性,已知一個隨機過程的譜密度,就可求其方差值,并根據(jù)其分布特征得到隨機過程的數(shù)據(jù),使隨機過程的預(yù)報具有確定性[3]。
2 頻率響應(yīng)法
海面上的艦船在不規(guī)則波浪的作用下發(fā)生運動的過程,可以從物理學(xué)中的能量轉(zhuǎn)換概念對其進行解釋說明。這種方法的基本原理為:將艦船看成一個能量轉(zhuǎn)換器,將海浪造成的不規(guī)則波ζ(t)視為輸入信號,經(jīng)過其轉(zhuǎn)化為作為輸出信號y(t)的艦船的機械能,其中縱搖運動參數(shù)可以作為輸出信號y(t)。圖1給出了該轉(zhuǎn)換關(guān)系的示意圖。
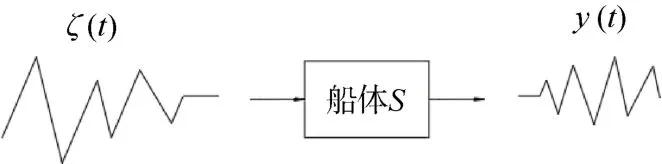
圖1 輸入與輸出的轉(zhuǎn)換Fig. 1 Conversion of input and output
其中,一個系統(tǒng)響應(yīng)如果是可疊加的并且是齊次的,那么這個系統(tǒng)為線性系統(tǒng)。在分析艦船在不規(guī)則平波浪中的運動狀態(tài)時,通常將船舶視為一個時間恒定的線性系統(tǒng)。因此當(dāng)風(fēng)浪為平穩(wěn)隨機過程時,風(fēng)浪引起艦船的運動也是一個平穩(wěn)隨機過程。由正態(tài)分布的特點可知,經(jīng)線性變換得到正態(tài)隨機過程同樣也是一個正態(tài)隨機過程。那么,如果艦船作為時間恒定的線性系統(tǒng),當(dāng)風(fēng)浪是正態(tài)隨機過程的情況下,由此造成的船舶運動也是正態(tài)隨機過程,其幅值符合瑞利分布。
由于隨機海浪的影響,艦船運動可以用頻域范圍內(nèi)的頻率響應(yīng)法來表示。該線性系統(tǒng)中的輸入信號x(t)和輸出信號y(t)之間的關(guān)系,可以用常系數(shù)線性微分方程來表示
本文假定n≥m,-∞<t<+∞。將其進行拉普拉斯變換可得

其中
將上式整理得

其中

H(S)為線性系統(tǒng)的傳遞函數(shù),其特點為傳遞函數(shù)僅與系統(tǒng)的特性有關(guān),而與輸入信號、輸出信號等其他因素?zé)o關(guān)。當(dāng)S為純虛數(shù)時,即S=jω時,式(11)可改寫如下:
由譜分析的特點可知,當(dāng)一個系統(tǒng)為線性系統(tǒng)時,其中輸出的譜密度函數(shù)為輸入的譜密度函數(shù)與系統(tǒng)的響應(yīng)幅值算子的乘積,如下式所示

根據(jù)式(13)即可求得輸出信號的譜密度函數(shù),通過對其進行相應(yīng)的推導(dǎo),就可以得到作為輸出信號的艦船的縱搖運動規(guī)律。
這種運動分析方法的優(yōu)點為:可以通過譜密度來表示隨機過程的能量,利用頻率響應(yīng)法的原理,可以將隨機過程中的隨機海浪與其引起的艦船隨機運動之間的不確定關(guān)系轉(zhuǎn)化為一個確定關(guān)系,這種確定關(guān)系可以用頻率響應(yīng)函數(shù)表示。
為得到高海況下艦船縱搖運動的規(guī)律,本文分別選取4級海況、5級海況以及6級海況3種高海況進行分析。
3 海況特點及海浪譜密度公式
為了更好地分析海上風(fēng)浪,人們根據(jù)蒲福(Beaufort)風(fēng)級表將海面風(fēng)速大小分為0-12共13個風(fēng)級,將海況等級按照海面特征分為 0-9共 10級。其中4級、5級以及6級的海況等級參數(shù)見表1,根據(jù)這3個海況等級對應(yīng)的海面征象,根據(jù)蒲福風(fēng)級表(Beaufort)可以得出與之相對應(yīng)的海面風(fēng)級,如表2所示[5]。
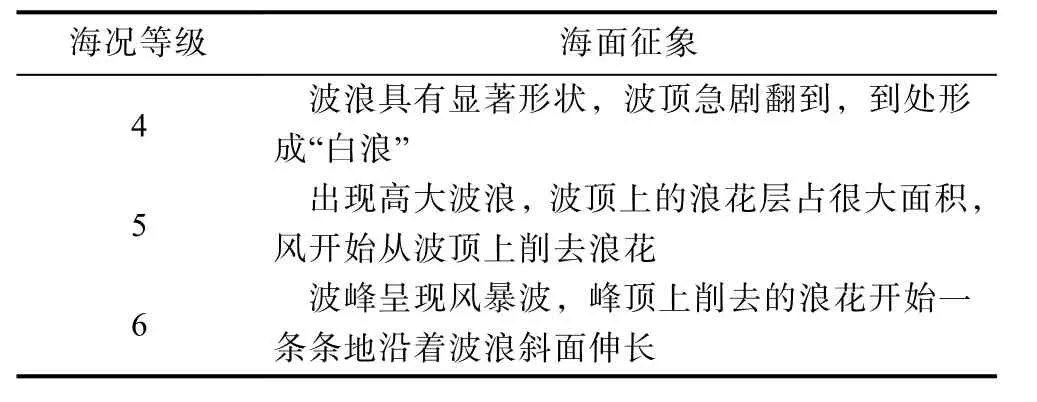
表1 海況等級表Table 1 Sea state scale
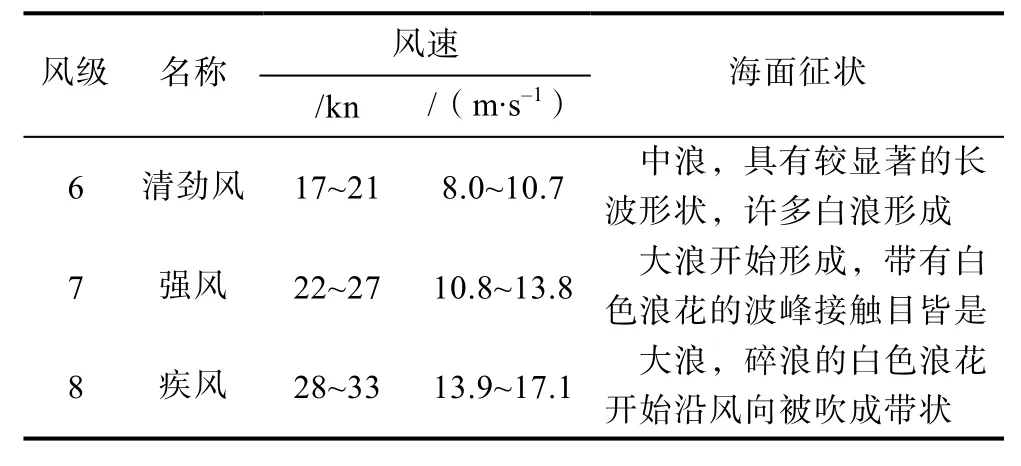
表2 蒲福風(fēng)級表Table 2 Beaufort scale
利用頻率響應(yīng)法來預(yù)測艦船在不規(guī)則風(fēng)浪中的縱搖特性時,首先需要對艦船航行海區(qū)的風(fēng)浪譜密度進行估算。由于實際測量某個海區(qū)的海浪譜較為困難,因此一些海洋領(lǐng)域以及船舶制造領(lǐng)域的專家學(xué)者根據(jù)大量的海上觀測和理論工作得到了各種海浪譜的公式,其中包括P-M譜、ITTC譜、JONSWAP譜以及方向譜等。由于目前采用的大多數(shù)標(biāo)準(zhǔn)波譜主要是基于P-M譜的形式建立,因此本文采用P-M譜對海浪進行分析[6]。該譜由皮爾遜和莫斯克維奇根據(jù)在海上測得的大量數(shù)據(jù)分析而成,兩人于1964年提出了如下的譜公式[7]:

式中:A=0.008 1g2;B=0.74(g/U)4;g為重力加速度;U為離海面19.5 m處的風(fēng)速。本文采用式(13)作為海浪譜密度公式。
4 縱搖運動分析
4.1 運動方程的建立與求解
運用切片法[8]對船舶在波中的縱搖和垂蕩的耦合運動進行分析。
在分析船體某切片的受力前,首先對其切片的運動進行分析,當(dāng)船體作為小幅度縱搖和垂蕩運動時,可以認(rèn)為船體切片作垂向運動。對運動坐標(biāo)系G-XYZ中X處船體橫剖面的運動進行分析,見圖2所示。
切片隨重心上升了z,由于縱搖下降了-Xsinθ,近似為-Xθ。此時剖面出的波面坐標(biāo)為ζ,根據(jù)式(15)求得該剖面與波面的垂向相對位置為

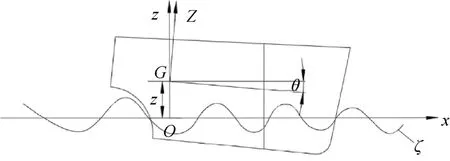
圖2 船體橫剖面切片的運動Fig. 2 Motion of the hull cross section
當(dāng)波浪運動導(dǎo)致切片受到外力并引起切片運動時,在對其進行分析時需要考慮流場內(nèi)史密斯效應(yīng)的影響因素[9]。本文使用等效波對其進行計算,而不是直接用表面波的升高來進行相關(guān)計算。實際應(yīng)用中,通常將等效波的深度用其切片平均的吃水深度來表示[10]。因此,若水線以下切片面積為S,切片寬度為2b,則平均吃水為

可知其等效波面方程為

對于切片來說,有3種流體動力作用在垂向運動的切片上,其中包括流體靜力、興波阻力以及附加慣性力。
首先,考慮流體靜力,由于切片吃水的變化,單位長度的上浮力為

其次,考慮興波阻力,對式(15)進行微分可以得到切片垂向速度

當(dāng)船在以速度V在水中前進時,在半固定坐標(biāo)系上觀察船的運動就相當(dāng)于觀察該剖面通過空間某固定位置時的情況,即
可推導(dǎo)出

這里的阻尼力為與速度成正比的力,當(dāng)阻尼系數(shù)NH時,切片上的阻尼力如下

同時,還需要考慮附加慣性力對其產(chǎn)生的影響。當(dāng)切片發(fā)生運動時,附加質(zhì)量產(chǎn)生的動力為

式中MH為單位切面的附加質(zhì)量。
由于動量的變化率即為附加慣性力,因此

垂蕩力Fz以及縱搖力矩Mθ由船舶運動而產(chǎn)生,并作用在船體本身上,因此將以上計算的力沿著船體的方向從船尾至船頭做積分計算,可以求得垂蕩力Fz以及縱搖力矩Mθ的表達式:
由于物體加速度的大小與作用力成正比,同時已知船舶的慣性力與外力平衡,因此船體垂蕩和縱搖運動方程如下:

式中:D為排水量;IYY為縱向慣性矩。
將各力的表達式代入上式,可以得到其運動方程
各系數(shù)算式如下:

式中:D為排水量;V為航速;ρ為水的密度;g為重力加速度;MH為各切片的附加質(zhì)量;NH為各切片的阻尼系數(shù);b為水下面半寬;IYY為船體縱向慣性矩。
波浪對船體的水動力系數(shù)和擾動力矩系數(shù)如下[11]:

式中:Tm=S/2b;S為切片水下面積;k*=kcosβ,k=ω2/g表示波數(shù);∫L表示在忽略端處影響時的沿船長積分。此外,在上述各表達式中假定波幅為1。
設(shè)此方程的解具有如下形式:

解得:
其中參數(shù)表達式為
當(dāng)海浪波幅為單位波幅時,方程的解表示單位波幅引起的縱搖和垂蕩運動特性,船舶縱搖運動與船舶垂蕩運動的頻率響應(yīng)函數(shù)可以分別用幅值θ0和z0表示。
由于只需要分析船舶在漂泊狀態(tài)下的縱搖情況,因此取該狀態(tài)下的船速V=0。同時切片的附加質(zhì)量以及各切片的阻尼系數(shù)此種狀態(tài)下不是影響船舶縱搖情況的主要因素,因此對其做簡化分析,取MH=0,NH=0。將上式整理化簡得:
4.2 基于頻率響應(yīng)法的某船縱搖運動分析
設(shè)縱搖運動時域函數(shù)為Sp(t),譜密度函數(shù)為Sp(ω),基于頻率響應(yīng)法可以得到輸入譜密度與輸出譜密度函數(shù)之間的關(guān)系
可推導(dǎo)出縱搖譜密度函數(shù)為
本文假定艦船縱搖角度是一個各態(tài)歷經(jīng)的平穩(wěn)隨機過程,切均值為0。由縱搖譜密度得出縱搖時域函數(shù)的核心為快速傅里葉變換,由于縱搖譜密度函數(shù)與其離散采樣點的信號頻譜具有確定關(guān)系,因此,在譜密度函數(shù)上進行離散采樣,即可構(gòu)造出縱搖運動的頻譜函數(shù),再通過對其進行傅里葉變換,即可得到縱搖運動的時域函數(shù)。劉獻棟等[12]給出了譜密度與離散形式的時間信號之間的關(guān)系,如式(41)所示。
縱搖運動時域函數(shù)為
在選取Δt時應(yīng)注意滿足(其中f為最t大采樣頻率),以避免發(fā)生頻率混疊效應(yīng)。可以得到離散傅里葉變換的模值

式中:ωk=kΔω(0ω0為參考空間頻率,取ω0=0.1 s-1)。由于Xk為復(fù)數(shù),設(shè)相位角為φk,則可以得出

式中φk可以再[0,2π]內(nèi)隨機取值。對式(43)中得到的進行補齊,可以得到對X進行離散k傅里葉變換即可得到母船縱搖幅度函數(shù)ψ(t)/rad,再對其進行弧度與角度轉(zhuǎn)換即可得到縱搖幅度的角度變化規(guī)律。
4.3 相關(guān)參數(shù)的計算和選取
根據(jù)已知資料,某船的參數(shù)如下:船體排水量D=512 t=5 120 000 N,水的密度ρ=1 000 kg/m3,重力加速度g=9.8 m/s2,船體縱搖慣性矩IYY=1.1428×1013kg·mm2,水線面寬度b=50 m。在考慮波動引起切片的受力時,在工程計算中,一般取切片平均吃水作為等效波的深度。由該船參數(shù)可知Tm=2.464 m,浪向角β=0°,波數(shù)k=k*=ω2/g,船長L=55.15 m。
4.4 基于MATLAB的縱搖運動仿真
根據(jù)上述海況條件,基于MATLAB軟件對某型艦船進行縱搖運動仿真。取采樣頻率f=50 Hz,分別對4級,5級和6級海況下UUV的縱搖幅度進行隨機仿真,得到如下結(jié)果,如圖3-5所示。其橫坐標(biāo)為時間t/s,縱坐標(biāo)為縱搖幅度的角度值Ψ(t)/(°)。
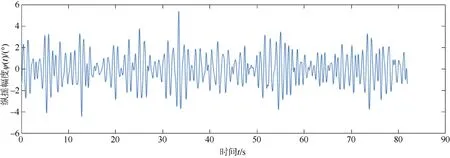
圖3 4級海況下艦船縱搖幅度Fig. 3 UUV pitch amplitude at sea state 4
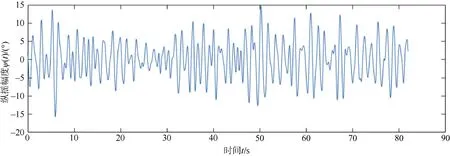
圖4 5級海況下艦船縱搖幅度Fig. 4 UUV pitch amplitude at sea state 5
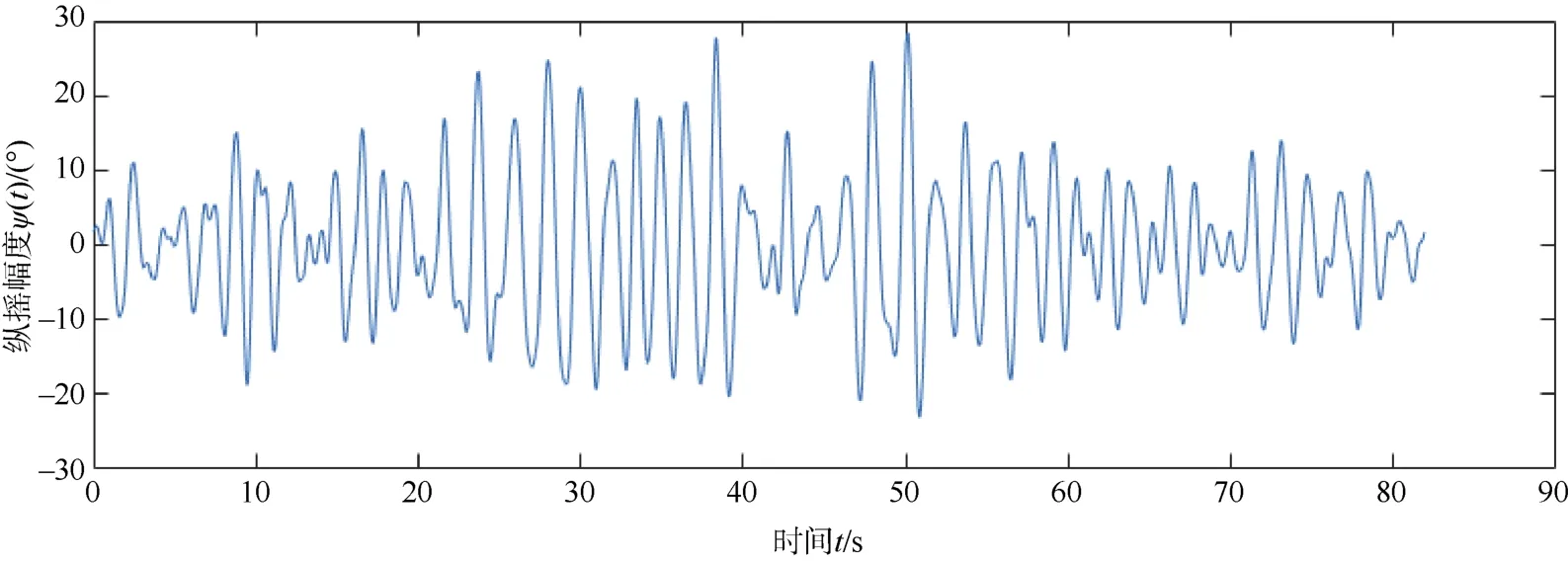
圖5 6級海況下艦船縱搖幅度Fig. 5 UUV pitch amplitude at sea state 6
為了驗證縱搖運動仿真的準(zhǔn)確性,本文利用由圖 3-5中縱搖幅度時域函數(shù)求得的縱搖譜密度函數(shù)與根據(jù)相關(guān)參數(shù)計算得到的縱搖譜密度函數(shù)Sp1(ω)、Sp2(ω)、Sp3(ω)進行對比。對比結(jié)果如圖 6-8所示。其中直線表示由已知參數(shù)求出的縱搖譜密度函數(shù),星號表示由縱搖時域函數(shù)得到的縱搖運動譜密度函數(shù)。可見:在 3組對比圖中,2種方法得到的縱搖譜密度函數(shù)擬合程度較高,因此可以驗證 3組仿真具有準(zhǔn)確性。
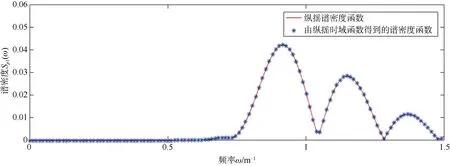
圖6 4級海況下縱搖譜密度對比圖Fig. 6 Roll spectrum density contrast chart at sea state 4
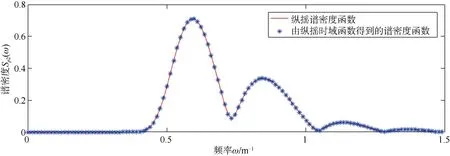
圖7 5級海況下縱搖譜密度對比圖Fig. 7 Roll spectrum density contrast chart at sea state 5
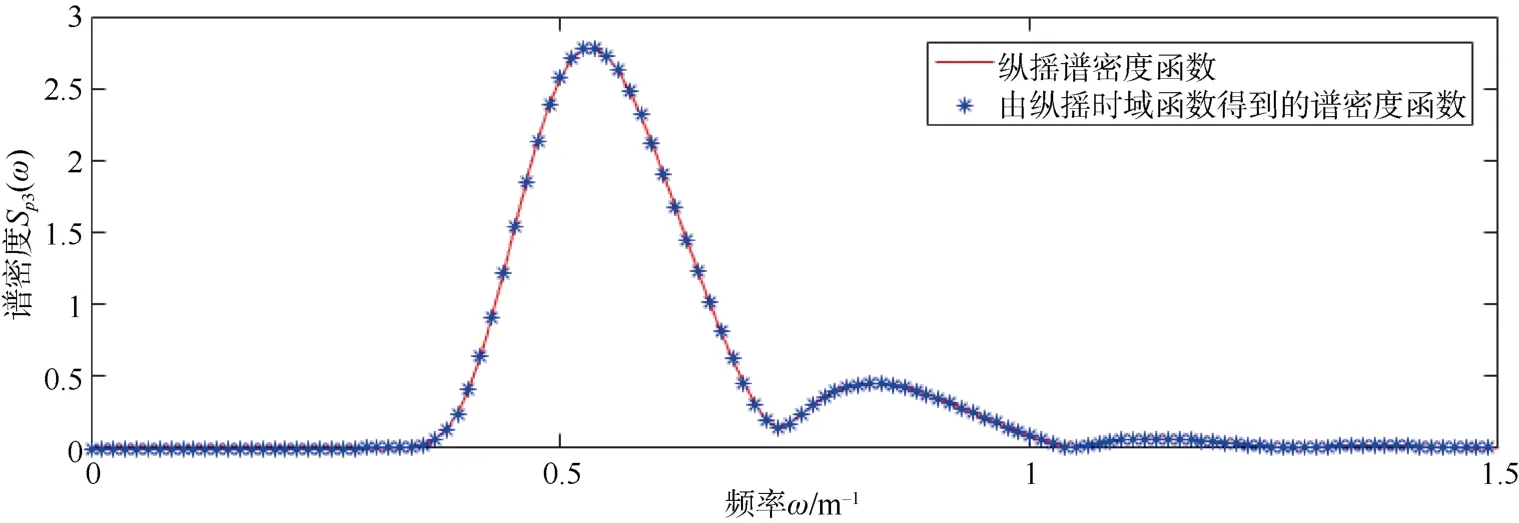
圖8 6級海況下縱搖譜密度對比圖Fig. 8 Roll spectrum density contrast chart at sea state 6
在高海況下,海況等級對艦船縱搖影響顯著。其中,海況等級越高,艦船縱搖的角度值就越大。該艦船的縱搖預(yù)報結(jié)果為:在4級海況下,母船縱搖的幅度在±6°之間;在 5級海況下,母船縱搖的幅度在±15°之間;在6級海況下。母船縱搖幅度可以達到±30°之間。
5 結(jié)束語
本文研究了高海況下艦船的縱搖運動規(guī)律,基于譜分析原理和頻率響應(yīng)法對艦船的縱搖運動規(guī)律進行分析,并對某型艦船在特定海況等級下的縱搖幅度進行仿真,依據(jù)仿真結(jié)論對其縱搖幅度進行預(yù)報,為分析艦船在復(fù)雜海況下的運動規(guī)律提供了一種研究思路。總的來說,本文僅在理論層面對這一問題進行了初步研究,真實海況條件遠比本文所分析的情況復(fù)雜得多,為獲取更全面的復(fù)雜海況下艦船運動規(guī)律,我們建議通過實驗室模擬和實船海試等方式開展進一步的分析與研究。
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設(shè)計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
當(dāng)代經(jīng)濟研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫(yī)藥現(xiàn)代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學(xué)學(xué)報(社會科學(xué)版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06