多功能仿生機械章魚設計
2020-08-31 01:30:24徐莉
價值工程 2020年24期
關鍵詞:結構設計
徐莉
摘要:多足機器人對樓梯的攀登能力相對較弱,而在我國大部分地區的建筑均為樓房,雖然有的高樓建筑存在電梯,但是大部分建筑只有普通臺階。由于樓房臺階對機器人的機動性的要求越來越高,而傳統的輪式和履帶式的機器人對地形的適應能力有限,人們尋求一種更有效的樓房臺階運載工具。八足機器人,可以自行在野地行走,爬坡,越障,奔跑,外界干擾后保持平衡,安全完整的運送物件。這不但在理論、設計、制造等諸多方面是革命性創新,而且對未來戰爭的模式將會帶來變革性的影響。為了實現樓梯攀巖能力,研究出適用于臺階運送的仿生、智能的多足運載機器人勢在必行。
Abstract: The ability of multi-legged robots to climb stairs is relatively weak, and most of the buildings in China are storied buildings. Although there are elevators in some high-rise buildings, most buildings only have ordinary stairs. As building steps have higher and higher requirements for the mobility of robots, and traditional wheeled and crawler robots have limited adaptability to terrain, people are looking for a more effective building step carrier. The eight-legged robot can walk in the wild, climb hills, cross obstacles, and run on its own. After external interference, it can maintain its balance and transport objects safely and completely. This is not only a revolutionary innovation in many aspects such as theory, design and manufacturing, but also has a transformative impact on the pattern of future warfare. In order to achieve the stair climbing ability, it is imperative to develop a bionic and intelligent multi-legged carrier robot suitable for step transportation.
關鍵詞:送快遞;八足機器人;爬樓梯;結構設計;步態分析
Key words: express delivery;eight-legged robot;stair climbing;structural design;gait analysis
中圖分類號:TP242 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文章編號:1006-4311(2020)24-0172-02
0 ?引言
隨著機構學、控制論、仿生學、人工智能、計算機科學以及信息與感知技術的深入研究,仿生機器人技術的發展越來越成熟,目前一個國家高科技水平和工業自動化程度的重要標志就是仿生機器人技術的水平,目前這種水平也變成了科學研究的熱點,并且伴隨著人們對未知環境的探索不斷增加,多足機器人技術也相對來說越來越成熟,發展的也比較快。在崎嶇不平的路面步行機器人與輪式、履帶式移動機器人相比具有獨特優越性能,在這種環境下多足步行機器人的研究蓬勃發展起來。而仿生步行機器人的出現更加顯示出步行機器人的優勢。
1 ?國內外多足機器人研究現狀
國外現狀:美國,日本和德國一直是科學和技術的發展名單的前列。多足仿生機器是研究學者在國內外的研究熱點。仿生機器人研究的是外部形狀和在自然界中活生物體的某些功能。經過三四十年的研究,世界各國已研制出多種多足仿生機器人,并應用到各種領域。
國內現狀:哈爾濱工程大學于2001年開始兩棲仿生機器人的研究,先后研制出多種樣機。2012年,哈爾濱工業大學機器人技術與國家重點實驗室以竹節蟲為仿生原型,研發出六足機器人HITCR-II;浙江大學于2009年研發出六足步行機器人。
2 ?主要研究內容
2.1 多功能仿生機械章魚研究任務
現在我們對機器人主要研究的任務包括以下幾點:
①對八足爬行機器人的動力研究;
②對八足爬行機器人的行走步態研究;
③八足爬行機器人的結構研究。
2.2 多功能仿生機械章魚的總體設計
2.2.1 結構設計
我們采用了關節式設計,因為這種多關節的機器人活動的距離比較大,并且活動很自如,所以現在的多足機器人都運用這種形式。而且這種關節式的機器人不管在什么情況下運動的范圍都是很大的,而且基本上是沒有死點這個說法。
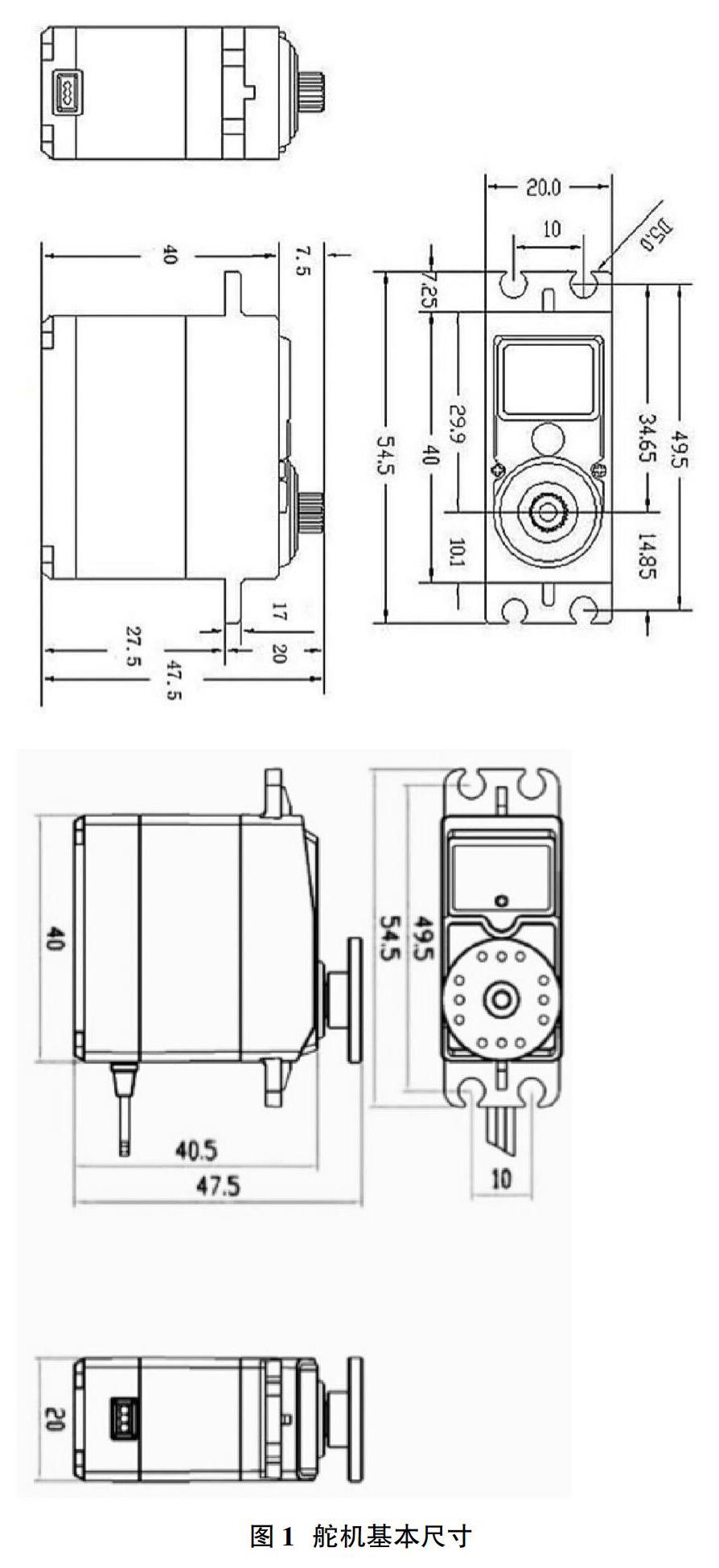
2.2.2 舵機的選擇
我們初步設定機器人移動速度為10°/s,經過對轉矩的計算,選擇了如圖1的DS3115型號的舵機。
2.2.3 八足機器人的結構設計
機器人身體長度482mm,寬度471mm,機器人站立時的高度168mm。機器人每條腿都有三個自由度,前兩個自由度都是和Z軸垂直的,最后一個自由度是跟Z軸平行的,這三個自由度每一個都是由一個舵機單獨的來驅動。為了保證機器人的穩定能力,八個足端呈橢圓形分布。
2.2.4 自由度計算
每條腿有三個關節組成,分別是基節、股節、脛節,分別初步設定長度為45mm、112mm、135mm,根據公式F=3n-2P1-Ph=3×3-2×3-0=3得出每個機械腿由三個自由度組成連接腿部關節。
根據初始狀態時機器人腿的伸開最大長度和機體的重心高度的要求。機器人腿伸開最大長度量由公式計算可得:
Lmax=285mm
Smax=376mm
2.2.5 強度校核
①基節連接件的設計與校核。
基節連接件起著機械腿與身體的連接作用,所以連接件就需要有一定的強度,現連接件厚度初步定為1mm,保證所設計厚度強度能達到標準,所以要校核連接件的截面。通過計算基節連接板的厚度選1mm合適。
②支撐板的設計與校核。
電機支撐板主要是連接著舵機通過舵機讓機械腿和機器人的身體連接到一起,因為這個板有一個彎曲的形狀,所以彎曲的那個截面,很容易斷,故他一定要有一定強度,我們把支撐板的厚度設定1mm,我們避免支撐板被折壞,所以我們要把這塊板子進行校核。我們根據計算得出板子體積是5628mm3。鋁合金材料的密度為7.93kg/cm3,可算得電機支撐件的質量為0.045kg,厚度選1mm。第二個關節重0.031kg,厚度為1.5mm,三個關節強度計算其重量為0.069kg,厚度為2mm。
3 ?控制系統設計
控制采用STM32單片機編程來操控各個舵機使機器足進行移動STM32單片機是有32系統,在單片機理他已經是相當高端的了,并且核心板子只需要最小系統就可以承載很多的復雜程序,現在的機器人包括一些智能機器人都用STM32單片機當作核心控制板,在市場內應用STM32單片機當控制板的有很多,不局限于機器人的領域,與STM32單片機能夠搭配的軟件和工具特別多,使該系列芯片成為眾多產品的理想選擇,不管是小終端還是一份大型的平臺。所以STM32單片機完全適用機器人控制的核心板。
4 ?結語
八足快遞機器人,是特別適合送快遞的,比如現在有很多的老樓是沒有電梯的,機器人需要爬樓梯進行送快遞,像輪式等一些機器人是沒有辦法完成這些動作的,八足爬行機器人就可以完全客服這項困難,只要我們設計好足夠長的機械腿,并把程序編好就可以,這樣機器人通過某種步態的配合,就可以完成爬樓梯的設計。
本次此設計機器人最大的困難就是機器人零件的制作,因為很多關節需要強度的,不能全部用3D打印制作,只能中間的關節進行3D打印制作,而機器人身體和機器人的最后一個關節,我們采用鋁合金材料,找某商家進行激光切割制作,剩下的有一些零件是有折彎的,需要在網上定做。
參考文獻:
[1]劉宇飛,丁亮,高海波,劉振,胡艷明,何玉慶,鄧宗全.基于激光測距的月球探測重載六足機器人自主避障控制[J].宇航學報,2018,39(12):1381-1390.
[2]徐海燕,姜樹海,徐振亞,吳蘇杭.六足仿生虎甲蟲機器人結構設計與靜力學分析[J].現代制造工程,2018(11):54-59.
[3]鄧超鋒,魏武,侯榮波,余俊俠.六足爬壁機器人的運動學建模與仿真[J].機械設計與制造,2018(12):245-248,253.
[4]瑚琦,夏志遷,雷航,汪敏.基于Multi-Agent的嵌入式六足機器人系統設計[J].軟件導刊,2018,17(12):142-145,150.
[5]Qing Tu, Qingyou Liu, Tao Ren, Yujia Li. Obstacle crossing and traction performance of active and passive screw pipeline robots[J]. Journal of Mechanical Science and Technology, 2019, 33(5).
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
建材發展導向(2022年6期)2022-04-18 08:17:26
建材發展導向(2021年11期)2021-07-28 06:57:42
建材發展導向(2021年7期)2021-07-16 07:07:28
防爆電機(2020年4期)2020-12-14 03:11:14
中國核電(2017年1期)2017-05-17 06:10:04
電子制作(2016年1期)2016-11-07 08:43:05
專用汽車(2016年5期)2016-03-01 04:14:49
專用汽車(2016年5期)2016-03-01 04:14:48
中國房地產業(2016年2期)2016-03-01 01:25:23
