紗筒搬運機器人的設計
2020-09-02 08:16:50魏哲,焦航
機械與電子 2020年8期
魏 哲,焦 航
(西安工程大學機電工程學院,陜西 西安 710048)
0 引言
紡織企業對紗筒的需求量巨大,紗筒在絡筒機上完成絡筒后,主要依靠人工進行收集、轉運、包裝等作業,作業過程中紗筒的搬運勞動強度高、效率低[1-2]。隨著機器人技術、自動控制技術的快速發展,機器人已經在越來越多的領域中廣泛應用。張若青等[3]設計了AGV與機械臂相融的移動裝配機器人,實現RV減速器支撐盤與針齒殼的抓取和裝配,代替人工完成裝配任務,裝配的間隙精度為1mm。金守峰等[4]通過單目視覺系統引導機器人完成筒子紗的抓取和上紗工序,降低了工人的勞動強度。李超等[5]利用PLC為控制器,通過工業無線通訊進行遠程監視,實現了智能搬運機器人在自動化線上對目標的抓取和搬運。焦玉成[6]等在碼垛操作中采用PLC與工業機器人進行以太網通訊,觸摸屏控制與監控,使機器人與供料系統相配合,實現了對動態物體的準確操作。張千等[7]通過構建抓取串類水果三維模型,獲取高精度、多信息的抓取位姿,引導并聯機器人實現了隨機放置的串類水果的抓取。Silwal等[8]實現了機器人代替人工完成了對水果的采摘作業。李海等[9]采用單片機為主控芯片、雙CPU串口通訊構建了智能分揀機器人,實現了對快遞包裹的快速分揀。黨宏社等[10]利用機器人視覺獲取目標的三維位姿,引導機器人實現了對復雜紋理的平面目標的抓取。郝大孝等[11]利用歐姆龍NJ控制器與Ether CAT的總線實現對Delta機器人動態目標抓取的精準控制與操控。王鵬等[12]利用多任務分配策略實現了多機械臂對煤矸石的快速、高效分揀。喬景慧等[13]通過開發機器人視覺伺服自適應控制系統,實現了對電視機背板的檢測與自適應抓取的功能。徐鳳強等[14]設計了短基線定位系統定位水下作業的機器人,通過多傳感器反饋信息融合來引導機器人,實現了對海產品的自主抓捕。劉漢偉等[15]提出了基于非規則物體基本形體組成的自主抓取方法,實現了非結構化環境下不同位姿、形狀等物體的自主抓取,抓取精度為93.3%。章林等[16]設計了藥袋自動分揀的機器人,利用Robot Control系統作為控制器,獲取藥袋位姿、運動速度等信息,實現對藥袋的視覺追蹤和高速分揀。張馳等[17]設計了用于多目標快速識別和抓取的機器人抓取系統,通過建立socket通信將工件的位姿信息傳遞給機械臂,引導其實現工件抓取。徐呈藝等[18]通過優化標定方程的求解,得到精確的手眼標定,實現了機器人對模板的精確抓取,抓取精度為96.2%。林強強等[19]針對零散工件的抓取,采用機器人視覺獲取目標的位姿,從而引導機器人完成對隨機擺放工件的準確抓取。喻群超等[20]借鑒人類的抓取機制,構建了卷積神經網絡抓取框架,在Youbot機器人上實現了對目標的高準確度的抓取操作。
針對紗筒作業過程中勞動強度大、效率低的問題,本文在分析紗筒結構和搬運作業特點的基礎上,設計開發紗筒搬運機器人,采用6自由度關節型機器人,設計具有雙內撐式抓取機構和推紗機構的末端執行器,實現單次抓取2個筒紗,降低了工人的勞動強度,提高了紗筒搬運工作效率和紡織裝備的自動化水平。
1 紗筒結構及作業分析
原紗作為紗筒生產時的原材料,將其經過絡筒機卷繞在中空的紗管上,形成圓筒形或圓錐形,且具有一定卷繞密度和纖維厚度的紗筒[1]。紗管為紙質或高分子材質,內表面中空且不光滑。筒紗的質量直接影響后道紡織工序的加工生產,并最終影響紡織品的質量。
絡筒機加工好的紗筒,主要通過人工搬運進行收集、轉運,將其放置在包裝機上或紗架上,為后續工序做準備。在紗筒搬運過程中,紗筒表面的纖維不能受到污染和破壞,紗線的卷繞密度不能降低,紗線結構不能破壞,因此要求作業過程主要受力點在中空的紗管內表面。
2 紗筒搬運機器人系統設計方案
根據紗筒的結構特征及人工搬運紗筒的作業特點,在分析企業的工作環境、紗架的位置等因素的基礎上,本文設計了如圖1所示的紗筒搬運機器人系統。
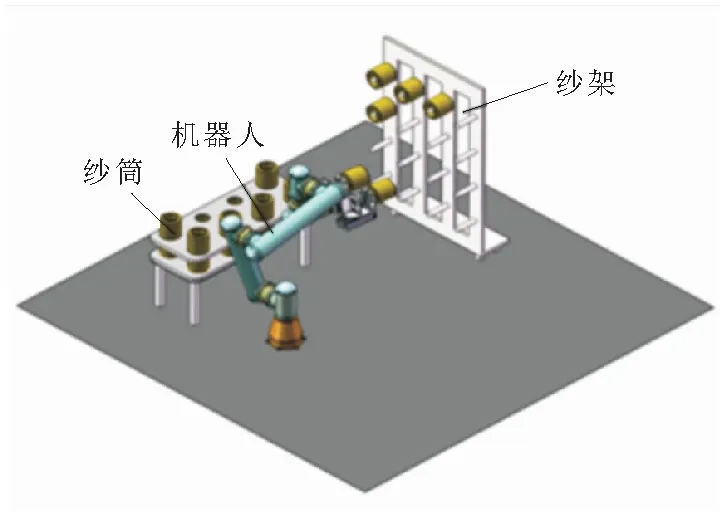
圖1 紗筒搬運機器人
紗筒搬運機器人以固定工作站的形式,主要由待搬運的紗筒、機器人和紗架構成。待搬運的紗筒隨機或整齊地擺放在機器人作業空間范圍內,紗架為多層的空間結構,均勻安裝有紗桿用于懸掛紗筒,機器人本體上安裝有專用的末端執行器,可以單次抓取2個待搬運的紗筒,再按設定好的路徑將紗筒放置在紗架的紗桿上,完成搬運作業。
3 機器人本體的選型
3.1 結構形式與自由度
由于紗筒是隨機擺放或整齊擺放,且層高也不一致,這就需要機器人本體具有較高的靈活性和較大的活動空間[21-22]。本文的紗筒搬運機器人以固定式工作站形式進行工作,因此選用關節型機器人。自由度數關系到機器人末端執行器所能到達紗筒放置的位置,自由度的數目越多就表示機器人越靈活,為了能盡可能使機器人的作業空間覆蓋到紗筒所在的任意位置,本文選取6自由度的機器人本體。
3.2 驅動方式的選用
機器人各關節處的驅動方式主要有液壓驅動系統、氣動驅動系統和電動驅動系統等方式[23],本文中紗筒抓取機器人的主要任務是完成對紗筒操作,而紗筒的質量為1.6~3.8 kg,負載相對來說比較小。機器人需將紗筒抓取后再放置到紗架的紗桿上,要保證有較高的精度和較大的輸出力,因此機器人的驅動方式選用了電動驅動。
3.3 機器人本體的選型
根據機器人機構形式、自由度數和驅動方式等性能參數的選取,本文選用UR10人機協作機器人作為紗筒搬運機器人的本體,其性能參數如表1所示。
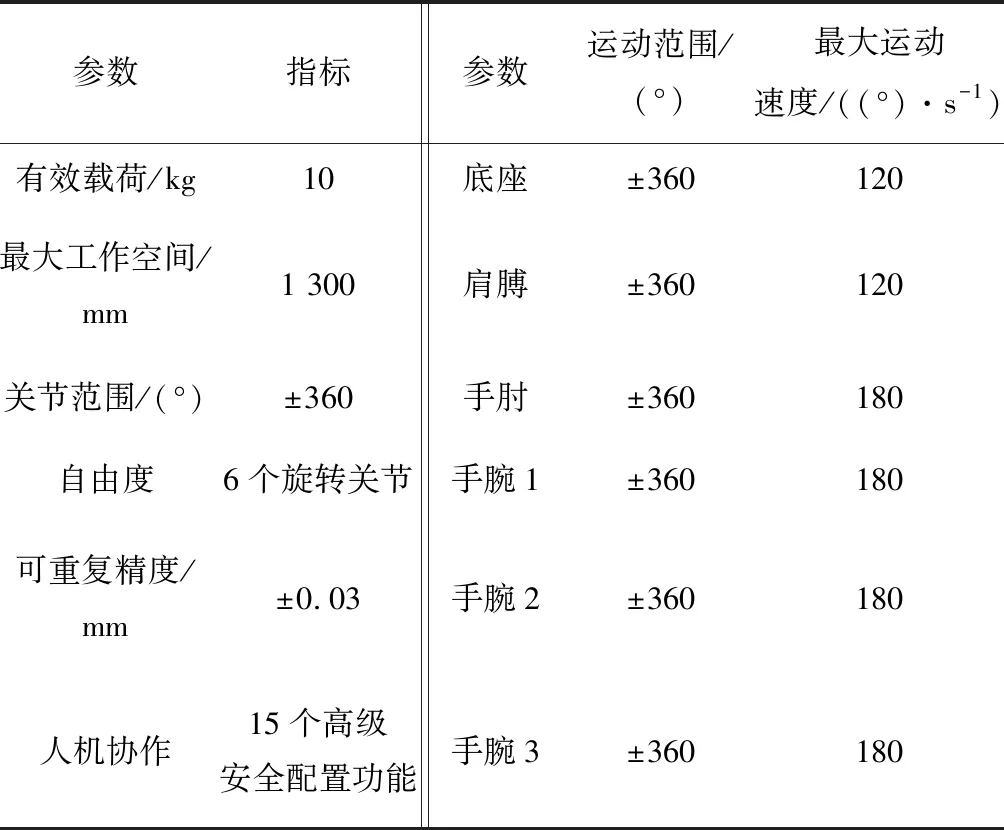
表1 機器人的性能參數指標
4 機器人末端執行器的結構設計
紗筒搬運機器人的作業過程為抓取紗筒,并將其放置在紗架上。為了提高紗筒的作業效率,本文設計了單次抓取2個筒紗的末端執行器,并采用SolidWorks進行末端執行器的結構建模。如圖2所示為紗筒搬運機器人的末端執行器,主要由抓取機構、推紗機構和其他連接零件構成。
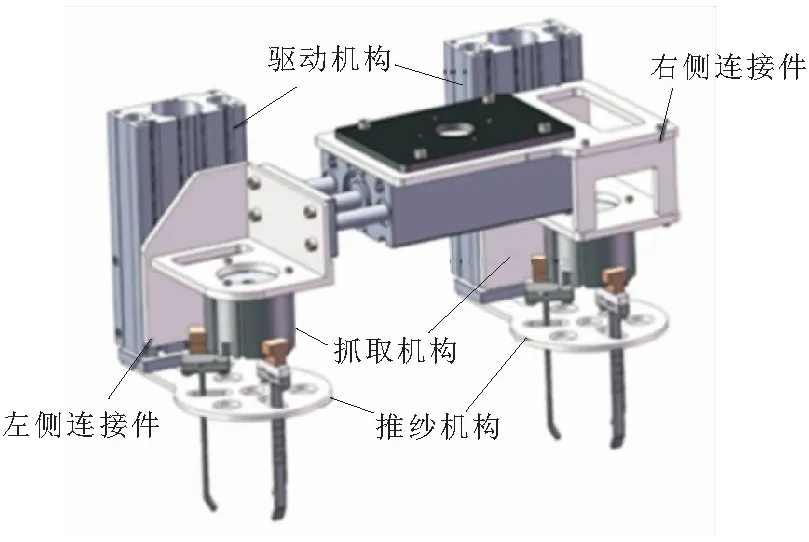
圖2 末端執行器
4.1 抓取機構的設計
抓取機構為直接接觸紗筒的機構,根據紗筒的結構和搬運特點,本文設計了如圖3所示的平移內撐式的雙抓取機構,由手指、連接件和驅動氣缸構成。3個手指上部通過連接件均勻分布地安裝在驅動氣缸上,手指采用碳纖維材料,手指的下部與紗筒內表面接觸起到支撐的作用;在氣缸的驅動下連接件可以沿氣缸直徑方向往復移動,帶動3個手指完成紗筒的內撐式抓取動作。

圖3 抓取機構
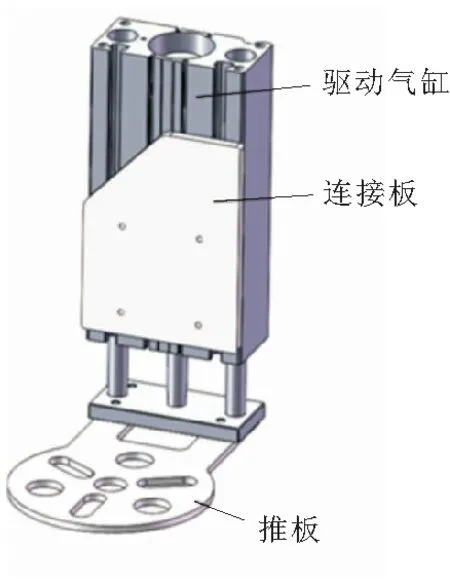
圖4 推紗機構
4.2 推紗機構的設計
抓取機構將紗筒抓起來后,通過機械人的運動軌跡規劃,將紗筒放置在紗架上。為了實現自動放置紗筒,本文設計了如圖4所示的推紗機構,該機構由推板、驅動氣缸和連接板構成。推板的中心孔與抓取機構的驅動氣缸有同軸度裝配精度要求,推板在圖5驅動氣缸的驅動下,可以上下移動,從而使紗筒從內撐式手爪上推入到紗架上。
5 實驗分析
5.1 實驗平臺及參數設置
為了驗證本文設計的紗筒搬運機器人性能的穩定性,搭建了如圖5所示的實驗平臺,將本文設計末端執行器安裝在UR10的腕關節3的位置,氣動壓力范圍為0.4~0.6 MPa。

圖5 實驗平臺
實驗用的紗筒規格如表2所示,按2層、每層8個的規則擺放,機器人1次抓取2個紗筒。
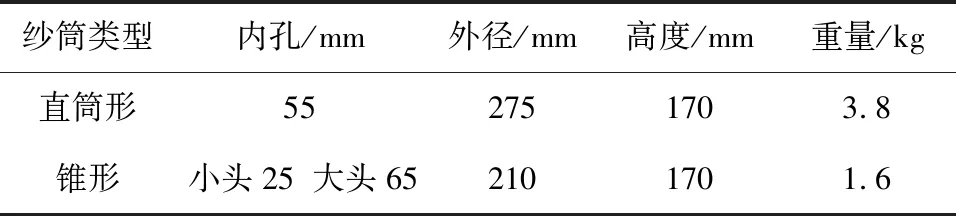
表2 紗筒規格
5.2 實驗分析
實驗中,紗筒搬運機器人利用示教器進行示教方式來操縱機器人運動,紗筒搬運的過程為:
a.紗筒搬運機器人在初始位置開始移動到紗筒上方。
b.機器人的肩關節和肘關節帶動腕關節運動,使末端執行器的抓取機構進入到紗管中,氣缸驅動末端夾持器的手爪張開,如圖6a所示,完成抓取。
c.機器人的機座關節旋轉,肩關節和肘關節帶動腕關節運動,腕關節3旋轉90°帶動末端執行器由圖6a所示的垂直狀態旋轉為圖6b所示的水平狀態,并向紗架運動。
d.在紗架的放置位置上,推紗機構在氣缸的驅動下向外伸出,使紗筒掛到紗架上,如圖6b所示,完成推紗后,機器人返回到初始位置。
e.若要連續搬運紗筒,則返回步驟a;否則,結束搬運任務。
本文對表2中的2種形狀不同的紗筒進行了搬運實驗,得到的實驗結果如表3所示。

表3 實驗結果
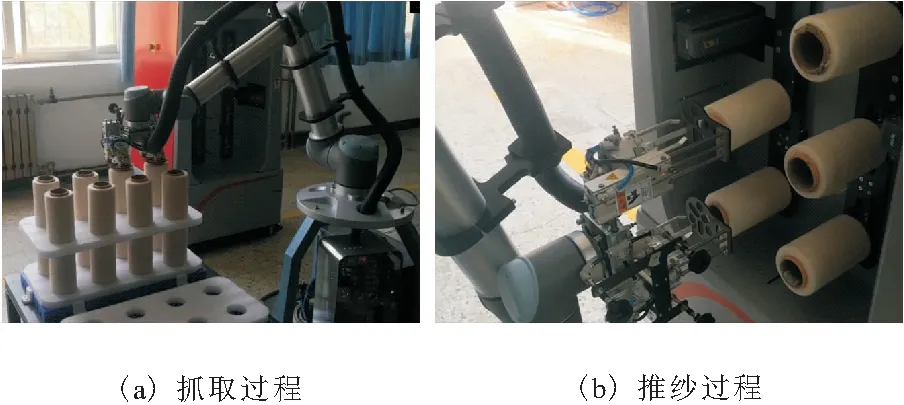
圖6 紗筒搬運機器人工作狀態
由表3可知,2種紗筒在搬運過程中均100%完成工作,沒有出現紗筒掉落、放置錯位等事故。直筒形紗筒的重量大于錐形紗筒,故單次平均耗時和總耗時上直筒形紗筒耗時較多,在機器人有效載荷的范圍內,隨著紗筒重量的增加,搬運速度會下降。在相同條件下,搬運機器人與2個人工相當,且是在長時間連續搬運時,機器人具有明顯的優勢,能夠代替人工完成對紗筒的操作,效率高,性能安全穩定。
6 結束語
針對勞動密集型為主的紡織企業人工搬運紗筒的效率低、強度大等問題,在對紗筒結構和操作工藝分析的基礎上,對機器人本體進行自由度、結構和驅動方式的參數選型,選用6自由度的UR10人機協作機器人作為紗筒抓取機器人的本體。為了提高紗筒搬運機器人的工作效率,設計開發了具有平移內撐式的雙抓取機構和推紗機構的末端執行器,采用SolidWorks對手指、連接件、推板等關鍵零部件進行建模,并進行了末端執行器的裝配。通過對2種不同形狀的紗筒進行的搬運實驗表明,該機器人可同時完成2個紗筒的抓取和推紗的工作循環,連續工作效率高,工作安全,性能穩定。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
現代裝飾(2020年7期)2020-07-27 01:27:42
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(2013年3期)2013-06-24 05:40:30