面向智能快速公交的M3磁浮交通系統
2020-09-02 09:10:25宋一鋒林國斌
現代城市軌道交通 2020年8期
關鍵詞:智能
宋一鋒 林國斌
摘 要:中低速磁浮系統因其噪聲低、速度快、選線靈活、建造和維護成本低等優點,在城市中作為一種快速公交方式發展起來。文章首先介紹美國 M3 磁浮系統的原理與特點,然后針對其面向市域便捷交通的形式(即 M3 城市磁浮系統)展開分析,闡述該系統面向智能快速公交的特點及其相對于其他公交方式的優點,說明其具有滿足市域快速旅客運輸需求、吸引自駕者向公交轉移、緩解城市交通擁堵的潛在價值。
關鍵詞:磁浮交通;M3;快速公交;智能
中圖分類號:U232
隨著軌道交通的快速發展,高速鐵路、地鐵、輕軌等公共交通方式支撐和推動著城市的運轉。高速鐵路面向城際(主要為長途)客流運輸,地鐵、輕軌面向城市內部客流運輸。然而,市域銜接一直以來是城市交通的薄弱環節,困擾著眾多居住于市郊、工作于市中心的上班族。為滿足市域快速旅客運輸的需求,國內外許多研發團隊正致力于開發中低速磁浮系統,以提供一種旅行速度高于自駕車且更加快捷、環保、經濟的公交制式,吸引自駕車通勤人員向公交轉移,從而提升城市交通的整體效能,減少交通擁堵和排放污染。其中,美國開發的M3磁浮技術和原理樣機具有突出的特色,其編組靈活,運行噪聲低,能耗低,無接觸供電,可全自動運行,有開發為環保、智能、快速公交的潛在價值。
1 M3 磁浮系統
1.1 原理
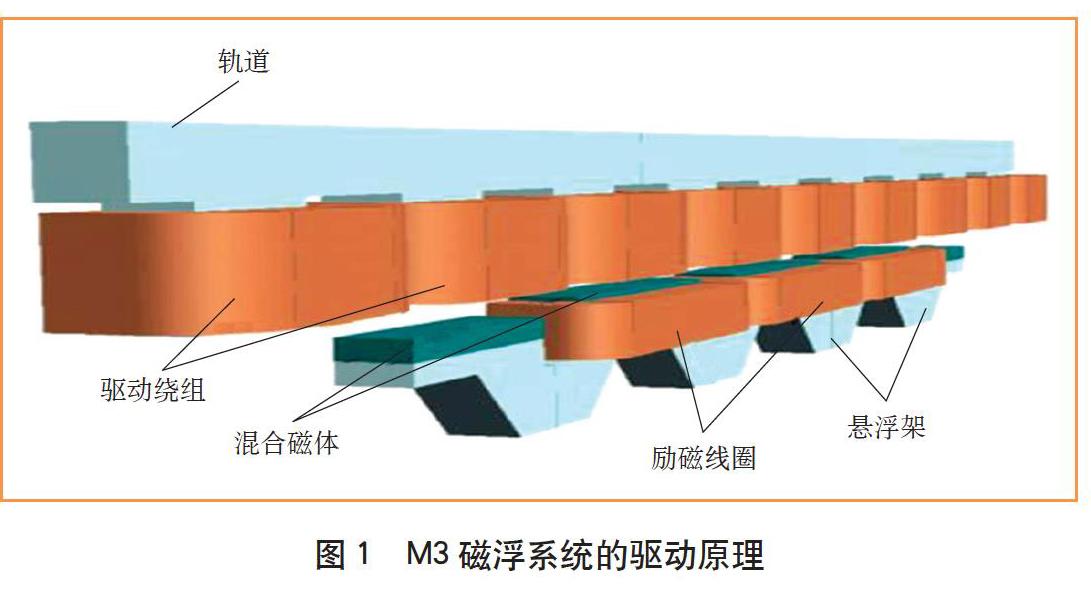
M3磁浮系統采用永磁與電磁混合懸浮技術和長定子直線驅動技術,可實現車輛在任何速度(即速度為0~最高運行速度)下的懸浮,并通過軌道兩側下部的同步直線電機長定子(包括驅動繞組與內部鐵芯)與車上安裝的混合磁體的相互作用驅動車輛運行。
M3磁浮系統的驅動原理如圖1所示。單節列車由若干個懸浮架支撐,懸浮架與車體直接連通,安裝在懸浮架上的混合磁體(即永磁和電磁混合磁體)用作直線電機的勵磁磁極。在驅動繞組中通入可調頻調壓的三相交流電后,會產生沿軌道縱向移動的磁場,此移動磁場與混合磁體相互作用,驅動車輛向前或向后直線運動。
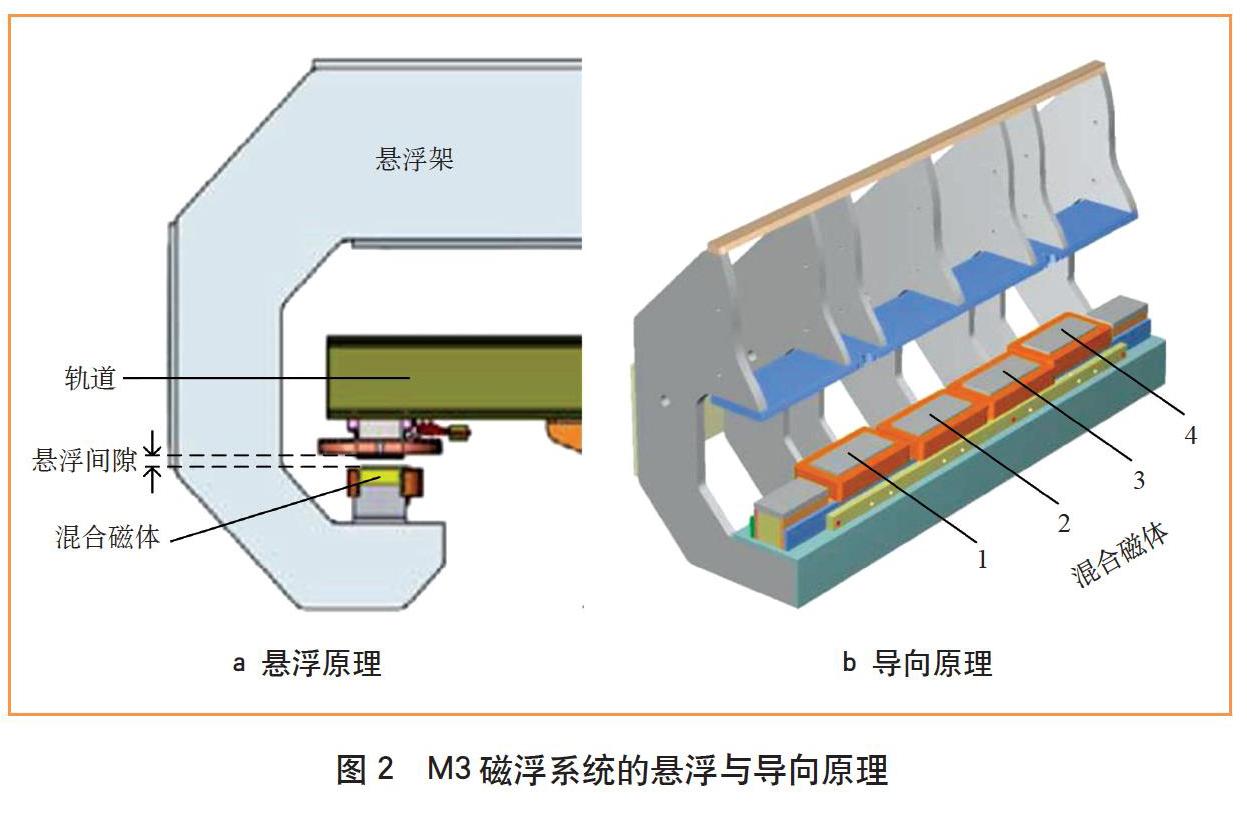
車輛懸浮的原理如圖2a所示。通過調節懸浮架上混合磁體中電磁鐵勵磁線圈的電流控制懸浮間隙,使混合磁體和軌道相互作用所產生的磁力與車輛自重和有效載重達到平衡,從而最大限度地減小懸浮能耗;車輛載重較大時減小懸浮間隙,載重較小或空載時增大懸浮間隙。
車輛的導向原理如圖2b所示。單個懸浮架的每側各有4個混合磁體,它們橫向錯位排列,第1個和第4個對齊,中間2個對齊,而且中間2個與第1、第 4個之間留有一定的偏移量。在M3磁浮系統中,車輛的橫向擺動可通過調節第1、第4個磁體與中間2個磁體中電流的比例進行反饋控制。車輛將會向電流較高的磁極方向移動。因此,僅用1 組磁體即可實現懸浮和導向。
1.2 特點
M3磁浮系統采用永磁與電磁混合懸浮技術,具有以下特點。
(1)懸浮間隙較大。目前投入運營的磁懸浮系統的懸浮間隙一般較小,為8~10 mm,對懸浮控制性能、軌道剛度和平順性的要求較高。M3磁浮系統采用永磁和電磁混合懸浮技術,將懸浮間隙增大至15~20 mm,可降低對軌道剛度和平順性的要求,有利于降低軌道成本。此外,M3磁浮系統可根據車輛負載的變化改變懸浮間隙,使勵磁線圈電流保持在接近0的水平,因此功耗較小,發熱也較少。在懸浮同樣質量的情況下,M3磁浮系統的懸浮功耗僅約為目前投入運營的中低速磁浮列車的20%。
(2)懸浮、導向和直線驅動功能由車上的同一套混合磁體實現,這是M3磁浮系統獨特的設計。用于懸浮的混合磁體可同時用作直線電機的轉子(勵磁磁極),以驅動車輛運行;還可通過調節橫向錯位排列磁體的懸浮電流分配差值調節導向力。這種設計有利于減小車輛的質量,并降低車上設備的總能耗。
(3)車輛采用無接觸供電方式。目前投入運營的磁浮線路一般采用直線感應電機驅動車輛運行,通過將傳送到車上的直流電逆變為可調壓調頻的三相交流電,為車上安裝的直線電機定子供電,使之產生移動磁場,并與軌道上的感應板發生相互作用,從而產生牽引力。由于牽引功率的轉換和控制在車上完成,因此需要使車上的受流器與軌道上的供電軌接觸,從而將電能從地面傳送到車上。然而,M3磁浮系統所采用的長定子直線同步電機不需要供電軌供電,牽引功率的轉換和控制都在軌道側完成。車上空調、懸浮、照明、通信等設備所需的電能可通過感應供電方式(非接觸)或蓄電池(在車站和車庫充電)提供。M3磁浮車輛的無接觸供電方式,有利于減小車輛運行噪聲,降低系統維護成本。
2 M3 城市磁浮系統
M3城市磁浮系統是針對市域(市區到郊外鎮區、機場或高鐵車站等)便捷交通設計的磁浮系統,能夠以智能化的運行模式實現市域之間的快速公交運輸。
2.1 面向智能快速公交的特點
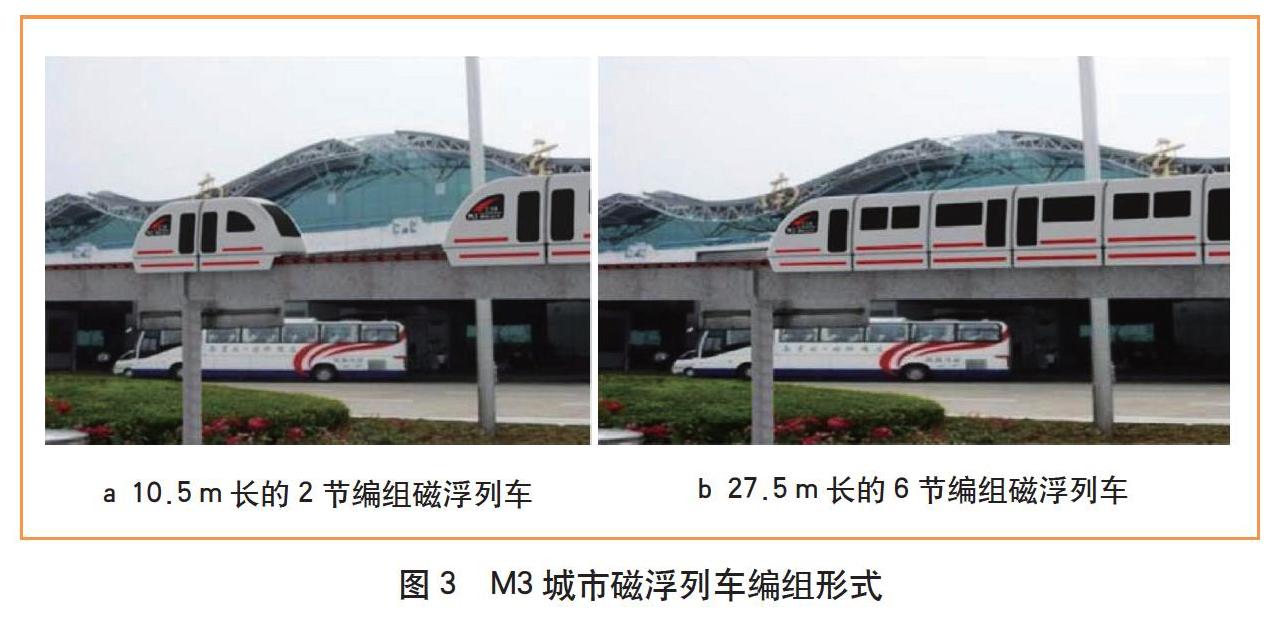
(1)列車編組靈活。M3城市磁浮列車的編組形式如圖3所示,其中圖3a中的2節編組小型列車可用于客流量較小的路段或時段,圖3b中的6節編組列車可用于客流量較大的路段或時段。在客流量較大的早晚高峰時段,用多編組列車按照固定時間和路徑運送上下班旅客。在非高峰時段,列車可自動解編為小型車輛,根據乘客個性化的用車需求,專送客人到達目的地。
(2)支持個人快速公交(PRT)模式。在客流量較小的非高峰時段,可依據PRT的概念,以M3城市磁浮系統為基礎,采用智能化、個性化的快速公交模式,即通過智能調度系統響應乘客的用車指令,就近調用小型車輛(如單節車),專送客人達到目的地,也可順路帶上同一路徑上、下車的其他旅客。這一模式可以理解為自動響應乘客呼叫的有軌專車,在人與車的關系上,類似高樓升降電梯的運行模式。
(3)群集、全自動運行,智能控制。M3城市磁浮列車采用自動運行控制技術,實現了全自動運行。列車運行控制系統是其運行調度組織的核心,通過該系統的列車定位、測速及車地無線通信等智能化功能,控制中心能夠實時獲取列車位置和速度相關的信息,并以此為依據對區段上列車的運行進行調度和控制,使列車之間可以保持較小的運行間隔,實現高發車頻率(大約5s發 1輛),從而縮短乘客候車時間,減少行程的平均時長。列車以短站距運行時(如典型的1 km停站),若停站時間控制在平均每站20 s(相當于公交車的常規停站時間),最高運行速度為25 m/s(90 km/h),加速度為1.6 m/s2,則其旅行速度為12.8 m/s(46 km/h),高于大多數公共交通系統的平均速度;列車以長站距運行時(如3 km以上),其最高運行速度可提高至45m/s(160 km/h),旅行速度可以達到80 km/h以上。
2.2 優點
M3城市磁浮系統可將軌道交通的3要素,即成本、旅行時間和對環境的影響降到最低限度。根據美國的技術評價報告,M3城市磁浮系統的優點如下。
(1)建設成本低。根據美國的技術評價報告進行數據換算可知,M3城市磁浮系統(單節車廂)每雙線千米的建設成本約為1.5~1.8億元人民幣(不包括用地費用),低于其他城市軌道交通系統,如表1所示。然而,M3城市磁浮系統的建設成本與運能相關,由于單節車廂運能較小,因此其建設成本較低;如果按照國內中低速磁浮系統的運能設計M3城市磁浮系統,則其與國內中低速磁浮系統的建設成本相當。
(2)運營及維護費用低。由于M3城市磁浮系統為全自動運行系統,車輛不需要配備操作人員,系統運營的人力成本較低。此外,系統中不包含對維護要求非常高的接觸供電磨損部件,軌道與車輛維護工作的主要內容是檢查和更換故障件,并偶爾清潔車輛電磁鐵表面。據估算,M3城市磁浮系統樣機在載客率為50%、速度為80 mile/h(128.8km/h)時,能耗為100W · h/人 · mile(62.1 W · h/人 · km),遠低于其他公共交通系統,如圖4所示。由于能耗低、所需運營人員少,M3城市磁浮系統的預測運營成本為0.12元/人 · km,為傳統公共交通系統的30%~50%。
(3)旅行速度高,乘客候車時間短。現有的城市公交制式存在旅行速度低(地面公交速度約為20~
30km/h,地鐵、輕軌等城市軌道交通約為30~40 km/h)、乘客旅行體驗不佳(地面公交換乘不方便,等候時間較長,約為5~10 min,地鐵、輕軌等城市軌道交通在早晚高峰時異常擁擠)的缺點。而M3磁浮列車的最高運行速度可達45 m/s(160 km/h),加(減)速度高達2 m/s2,從而使其旅行速度顯著提高:當平均站間距為3km時,可達80 km/h;為5 km時,120 km/h;為10km時,150 km/h。此外,由于M3城市磁浮系統的車型小且為車軌側同步牽引,便于進行車輛控制,因此其能夠實現20~30 s的運行間隔,縮短乘客的平均候車時間。列車旅行速度的提升與乘客候車時間的縮短可大大增加這種新型交通系統的吸引力。
(4)環境友好。由于M3城市磁浮系統無輪軌接觸,無傳統輪軌系統的弓網關系及接觸受流裝置,因此其運行時沒有機械摩擦產生的噪聲,對環境影響小,適合采用高架結構形式敷設。此外,其采用的小型列車和軌道對城市景觀影響較小。
3 結語
M3城市磁浮系統的設計面向市域快速交通,與地鐵、輕軌等傳統城市軌道交通相比,具有建設成本低、旅行速度高、旅行時間短、環境友好等優點,更能吸引自駕車通勤人員向其轉移,從而有效解決城市交通擁堵的問題。
但目前的M3城市磁浮系統還不成熟,需要2~3 年時間建設約3 km長的試驗線(可作為預規劃線路的先行段),解決原創技術的引進消化及工程化開發、驗證等問題。如開發成功,M3城市磁浮系統將成為解決大、中城市交通擁堵的有力工具。
參考文獻
[1]宮曉剛,劉春榮. 基于馬爾科夫鏈模型的交通方式劃分研究——以北京市常規公交與軌道交通為例[J]. 青島理工大學學報,2019,40(3):107-111.
[2]龐金爽. 城市軌道交通運營客運市場分析與客流吸引策略[J]. 商訊,2020(18):131-132.
[3]柴曉鳳. 中速磁浮節能運行圖優化方法研究[D]. 北京:北京交通大學,2019.
[4]魏江,張曉俊,何明明. 中小運量城市軌道交通車輛選型分析[J]. 工程技術研究,2020,5(5):250-251.
[5]李希寧,佟來生.中低速磁浮列車技術研究進展[J]. 電力機車與城軌車輛,2011,34(2):1-4.
[6]徐少亭,孔德鵬,王震,等. 中低速磁浮車輛制動夾鉗單元設計研究[J]. 現代城市軌道交通,2020(1):21-25.
[7]滕峻輝. 美國磁浮發展戰略與進展[J]. 綜合運輸,2004(8):72-75.
[8]龐富恒,魏厥靈,閆曉言. 我國中低速磁浮交通發展綜述[J]. 人民公交,2019(5):65-68.
[9]蔣超華. 永磁混合磁浮列車驅動電機及其控制研究[D]. 四川成都:西南交通大學,2014.
[10] 李云強,林國斌,廖志明. 中低速磁浮列車U形電磁鐵的電磁力特性分析[J]. 鐵道標準設計,2019,63(8):52-57.
[11] 黃中榮,羅世輝. 基于M3車輛懸浮架結構方案的曲線通過能力研究[J]. 電力機車與城軌車輛,2012,35(4):1-5.
[12] 黃中榮,奚華峰. 基于M3磁懸浮車輛懸浮結構與解耦設計研究[J]. 機車電傳動,2012(4):44-48.
[13] 鄧仁燕. 中低速磁浮直線感應電機牽引控制系統研究[D]. 四川成都:西南交通大學,2015.
[14] 李劍,劉孟愷,高宏. 市域軌道交通牽引供電制式的選擇與優化[J]. 城市軌道交通研究,2019,22(6):159-162.
[15] 肖飛. 中低速磁浮交通的技術經濟性分析[J]. 鐵道工程學報,2017,34(3):99-105.
收稿日期 2020-05-18
責任編輯 蘇靖棋
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44
