基于正逆向解算的單軸旋轉(zhuǎn)慣導(dǎo)參數(shù)辨識方法
2020-09-03 14:09:54王靈草胡小兵
壓電與聲光 2020年4期
王靈草,陽 洪,胡小兵,張 裕
(中國電子科技集團公司第二十六研究所, 重慶 400060)
0 引言
在單軸旋轉(zhuǎn)光纖陀螺慣導(dǎo)系統(tǒng)中,由于慣性測量單元繞方位軸旋轉(zhuǎn),水平常值及慢變陀螺漂移被調(diào)制,與捷聯(lián)慣導(dǎo)系統(tǒng)相比,其導(dǎo)航精度將大幅提高,但旋轉(zhuǎn)軸陀螺漂移不能被調(diào)制補償,成為影響導(dǎo)航精度的關(guān)鍵因素[1]。因此,估計并補償旋轉(zhuǎn)軸z軸陀螺漂移對單軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng)至關(guān)重要[2]。另外,在慣性導(dǎo)航系統(tǒng)實際應(yīng)用中,為了提高載體的快速反應(yīng)能力和機動能力,常要求慣導(dǎo)系統(tǒng)能在最短時間內(nèi)為載體提供滿足指標(biāo)要求的姿態(tài)基準(zhǔn)和導(dǎo)航結(jié)果。而在慣導(dǎo)系統(tǒng)對準(zhǔn)過程中,對準(zhǔn)精度需要更長的對準(zhǔn)時間來保證。為了縮短對準(zhǔn)時間并提高對準(zhǔn)精度,且能夠辨識出z向旋轉(zhuǎn)軸陀螺漂移,本文提出了一種適用于靜基座條件下的參數(shù)快速辨識方法,該方法基于時間正逆向解算算法[3-4],通過建立開路法航向角誤差模型,增加航向角量測量,利用最小二乘算法實現(xiàn)了初始姿態(tài)的確立和z向陀螺漂移的估計。
1 參數(shù)辨識對準(zhǔn)算法
1.1 慣性系坐標(biāo)系定義
1) 慣性坐標(biāo)系(i系,OXiYiZi)。原點位于地心的慣性空間。
2) 地球坐標(biāo)系(e系,OXeYeZe)。e系相對i系的角速率為地球自轉(zhuǎn)角速度ωe。
3) 導(dǎo)航坐標(biāo)系(n系,OXnYnZn)。選取當(dāng)?shù)氐乩碜鴺?biāo)系為導(dǎo)航系,原點O位于載體所在位置,Xn、Yn和Zn分別指向東向、北向和天向。
4) 旋轉(zhuǎn)坐標(biāo)系(p系)。原點位于電機旋轉(zhuǎn)平面內(nèi),z為電機旋轉(zhuǎn)軸,x由x陀螺敏感軸在垂直z的平面內(nèi)的投影所確定,y由右手定則確定。
5) 初始時刻旋轉(zhuǎn)單元體慣性坐標(biāo)系(ip0系)。初始對準(zhǔn)t0時刻,ip0系與p系重合,初始對準(zhǔn)開始后ip0系不隨載體或旋轉(zhuǎn)體轉(zhuǎn)動,在慣性空間指向不變。
6) 初始時刻慣性凝固坐標(biāo)系(i0系)。初始對準(zhǔn)t0時刻,i0系與i系重合,初始對準(zhǔn)開始后,在慣性空間指向保持不變。
1.2 對準(zhǔn)算法結(jié)構(gòu)
靜基座條件下,基于數(shù)據(jù)存儲的正逆向計算對準(zhǔn)算法的時間結(jié)構(gòu)框圖如圖1所示。首先利用實時采集的陀螺和加速度計數(shù)據(jù)進行基于慣性系初始姿態(tài)角的粗對準(zhǔn),在實時粗對準(zhǔn)過程中,同步壓縮每秒的陀螺加速度計信息并將其存儲;待粗對準(zhǔn)結(jié)束后,再利用存儲的數(shù)據(jù)進行基于正逆向計算的參數(shù)辨識精對準(zhǔn),直至對準(zhǔn)結(jié)束。
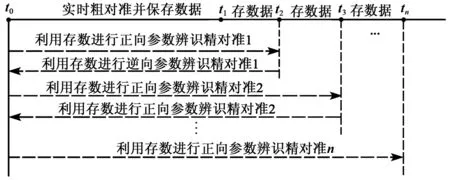
圖1 基于時間正逆向計算的靜基座快速對準(zhǔn)算法結(jié)構(gòu)圖
由于濾波需要消耗時間,因此在逆向解算過程中還需要繼續(xù)采集陀螺、加速度計數(shù)據(jù)并保存關(guān)鍵數(shù)據(jù),直至t2時刻(濾波計算時間與陀螺加速度計的實時采樣時間相遇時刻);再利用[t0,t2]段保存的數(shù)據(jù)進行逆向參數(shù)辨識精對準(zhǔn),依次進行下去直至對準(zhǔn)結(jié)束。
1.3 靜基座對準(zhǔn)參數(shù)辨識粗對準(zhǔn)模型

(1)
(2)


(3)
式中Δλ=λt-λ0為相對t0時刻的經(jīng)度變化量,靜基座對準(zhǔn)時Δλ=0,行進間對準(zhǔn)時λt可由GPS經(jīng)度提供。
根據(jù)雙矢量定姿原理可得:
(4)
式中tk1,tk2指對準(zhǔn)過程中的k1、k2時刻;v為速度矢量。其中:
vn(t)-gn}dt
(5)
(6)

1.4 粗對準(zhǔn)過程中壓縮保存關(guān)鍵數(shù)據(jù)方法

(7)
式中I為單位矩陣。

(8)

1.5 靜基座對準(zhǔn)參數(shù)辨識精對準(zhǔn)模型
基于正逆向計算的最小二乘算法參數(shù)辨識精對準(zhǔn)模型如下:
系統(tǒng)狀態(tài)變量為
(9)
系統(tǒng)量測方程為
Z=HX+V
(10)
其中
(11)
式中V為量測噪聲矢量。

(12)

(13)
(14)
(15)
(16)
1.5.1參數(shù)辨識精對準(zhǔn)中正向?qū)Ш浇馑闼惴?/p>
正向?qū)Ш浇馑氵^程中,式(11)中的fE、fN可由下式計算獲得:
(17)

(18)

(19)
tanψ=T′12/T′22
(20)

(21)
正向?qū)Ш浇馑氵^程中H陣中的θzk-1為
θzk=θzk-1+Δθz
(22)
估計參數(shù)的遞推最小二乘方程為
Hk+1Pk
(23)
(24)
式中,對準(zhǔn)開始時刻k=0時,X0=0;P0=1 000I,依據(jù)遞推最小二乘公式即可估計出誤差參數(shù)X。
1.5.2參數(shù)辨識精對準(zhǔn)中逆向?qū)Ш浇馑闼惴?/p>
逆向?qū)Ш浇馑氵^程中,量測量Z中fE、fN可由下式計算得到,即
(25)

(26)

逆向?qū)Ш浇馑氵^程中,H陣中θzk-1為
θzk-1=θzk-Δθz
(27)
式中Δθz可由粗對準(zhǔn)過程中存儲的關(guān)鍵數(shù)據(jù)獲得。
逆向遞推最小二乘方程為
Hk-1Pk
(28)
(29)
式中對準(zhǔn)開始時刻k=0時對應(yīng)的X和P陣,X0和P0取正向最小二乘方程中末時刻的狀態(tài)變量和系統(tǒng)狀態(tài)方差陣,依據(jù)逆向遞推最小二乘公式即可估計出誤差參數(shù)X。
2 試驗驗證
為了進一步驗證本文提出的基于時間正逆向計算對準(zhǔn)算法靜基座時在實際慣導(dǎo)系統(tǒng)中的對準(zhǔn)效果,本節(jié)利用一套實際單軸光纖陀螺慣導(dǎo)系統(tǒng)進行靜基座對準(zhǔn)跑車試驗。試驗中,車輛先靜止一段時間進行對準(zhǔn),對準(zhǔn)后車輛可自由行進。粗對準(zhǔn)結(jié)束后,利用粗對準(zhǔn)過程中保存的數(shù)據(jù)進行基于時間正逆向計算的參數(shù)辨識精對準(zhǔn)算法。由于跑車試驗中無法提供姿態(tài)基準(zhǔn),本實驗以導(dǎo)航位置誤差來驗證精對準(zhǔn)精度。試驗中對準(zhǔn)時間為16 min,其中傳統(tǒng)對準(zhǔn)算法中,粗對準(zhǔn)4 min,精對準(zhǔn)12 min,基于時間正逆向計算的對準(zhǔn)算法中,粗對準(zhǔn)12 min,精對準(zhǔn)利用粗對準(zhǔn)過程中保存的12 min數(shù)據(jù)進行第一次正、逆向計算,再利用保存的全部16 min數(shù)據(jù)進行第二次正向精對準(zhǔn)。試驗過程中載體的速度及姿態(tài)曲線如圖2、3所示。傳統(tǒng)對準(zhǔn)算法和基于正逆向計算算法中平臺偏角的收斂曲線如圖4、5所示。z陀螺漂移的收斂曲線如圖6所示。其位置誤差(ΔSN,ΔSZ)對比曲線如圖7所示。圖7中位置基準(zhǔn)以GPS提供的位置,誤差曲線為慣導(dǎo)與GPS的位置差。
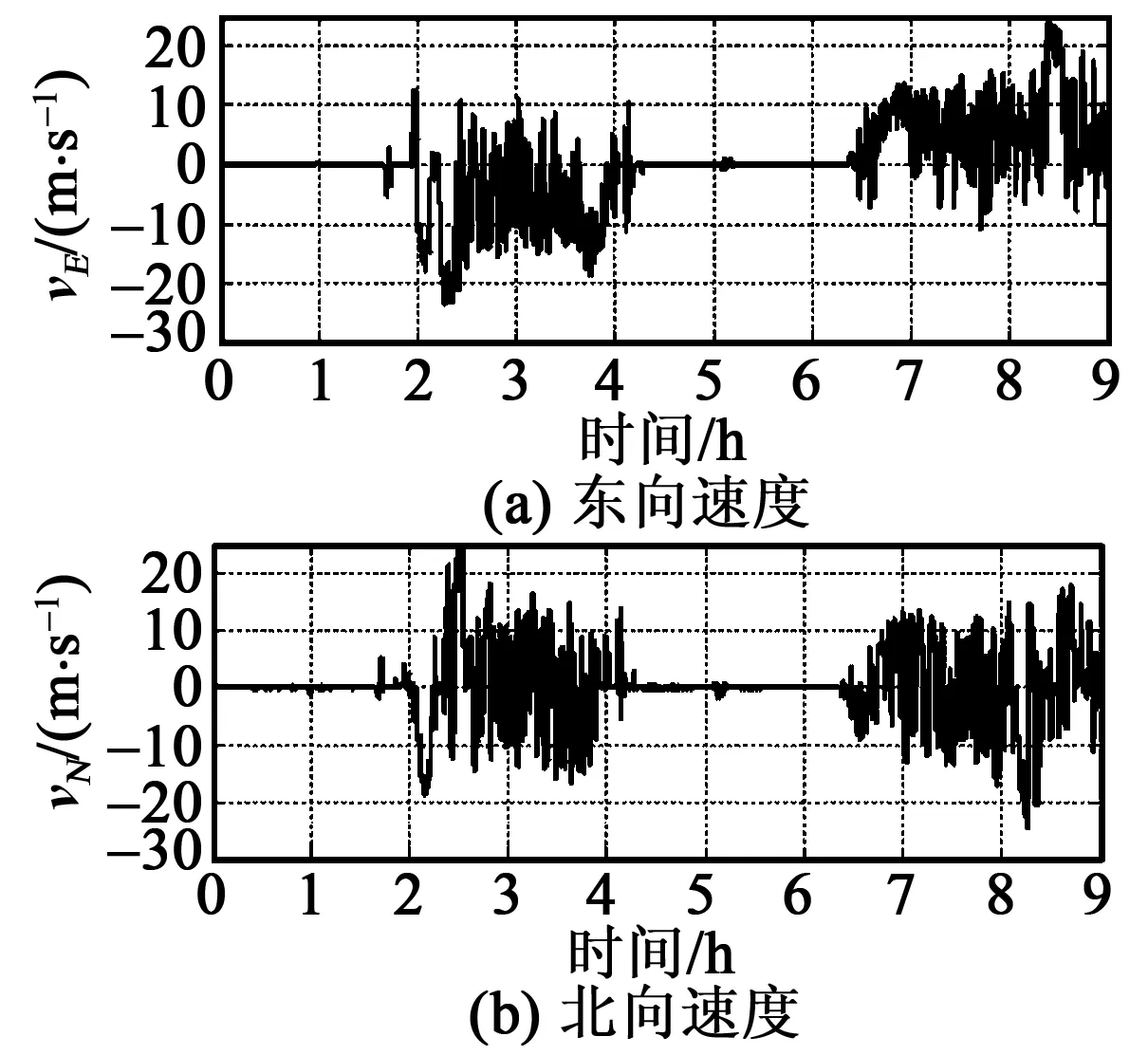
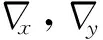
圖2 載體東北向速度
圖3 載體姿態(tài)
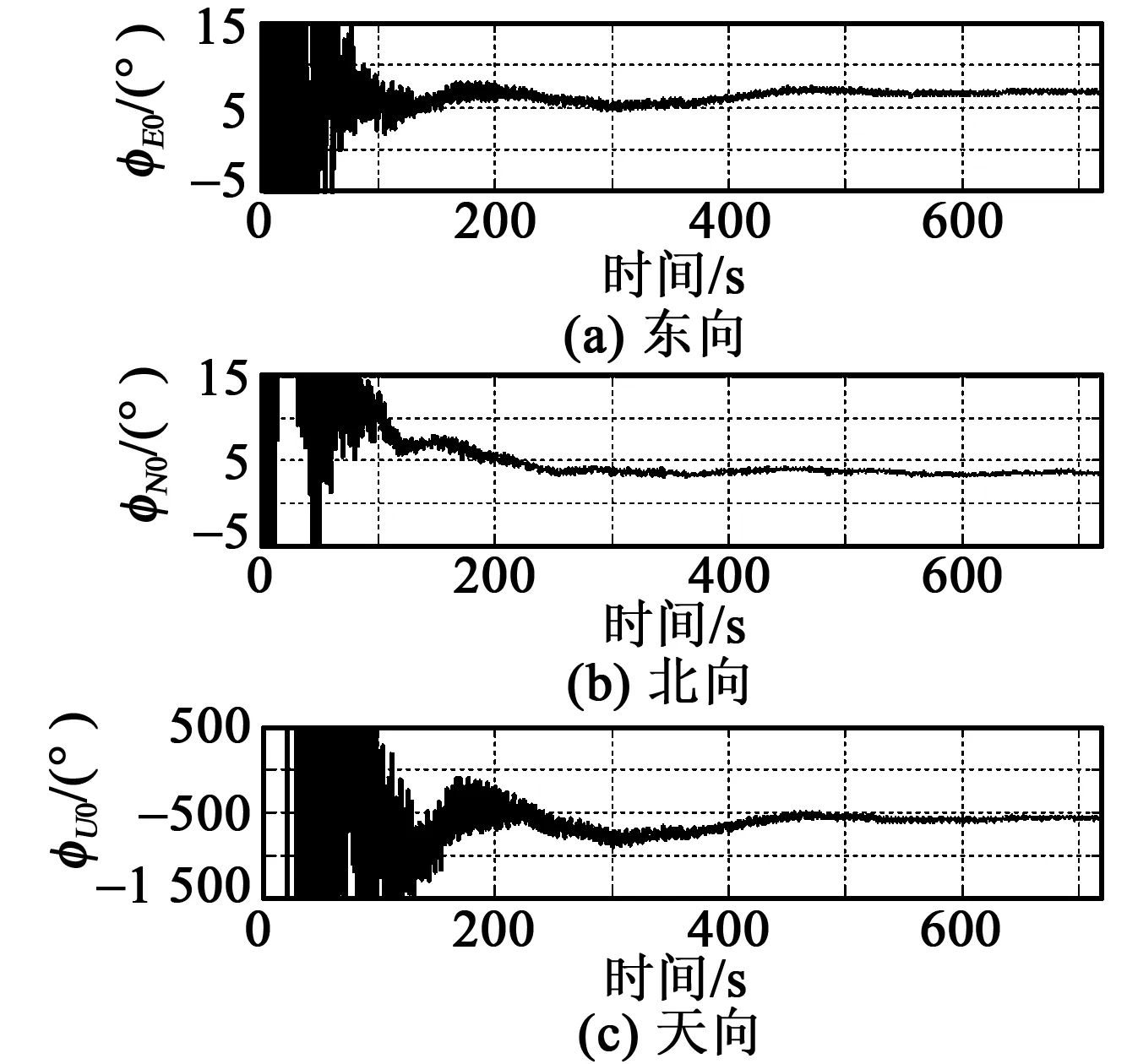
圖4 傳統(tǒng)對準(zhǔn)算法中平臺偏角收斂曲線
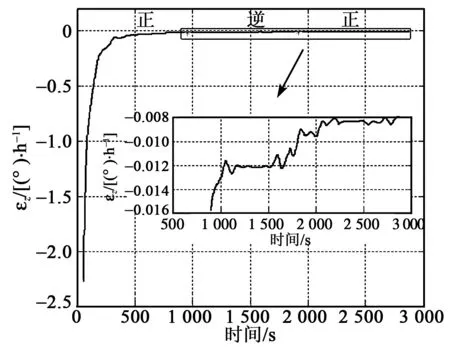
圖6 z軸陀螺漂移估計結(jié)果
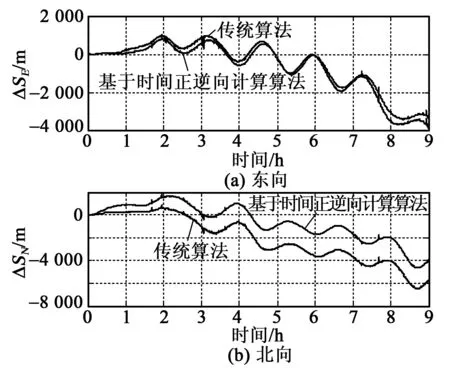
圖7 跑車試驗東北向位置誤差對比
由圖2可以看出,載體跑車過程中東、北向的速度最大、最小值達到了±20 m/s。由圖3可以看出,載體跑車過程中有轉(zhuǎn)彎運動也有掉頭運動。在圖2、3所示的運動狀態(tài)下,利用圖4、5可以看出,本文提出的對準(zhǔn)方法相當(dāng)于變相延長了對準(zhǔn)時間,且能很快估計出z軸陀螺漂移(見圖6),z軸陀螺漂移收斂至-0.008 (°)/h。經(jīng)過對準(zhǔn)并補償z軸陀螺漂移后,經(jīng)過9 h的導(dǎo)航結(jié)果如圖7所示,由圖7可以看出,基于時間正逆向計算后,9 h定位誤差東向最大值為3 370 m,北向最大誤差為4 631 m,而基于傳統(tǒng)算法9 h定位誤差東向最大值為3 875 m,北向最大誤差為6 446 m,因此,利用本文提供方法使系統(tǒng)的徑向定位誤差從7 521.1 m減小為5 727.4 m,定位精度提高約24%。從跑車試驗結(jié)果證明基于時間正逆向計算的方法定位誤差更小,定位精度優(yōu)于2 n mile/12 h,對準(zhǔn)方法更優(yōu)。
3 結(jié)束語
本文提出的基于數(shù)據(jù)存儲的正逆向計算快速對準(zhǔn)方法,首先利用實時采集的陀螺和加速度計數(shù)據(jù)進行基于慣性系初始姿態(tài)的粗對準(zhǔn),在實時粗對準(zhǔn)過程中,同步壓縮每秒的陀螺加速度計信息并將其存儲;然后利用存儲數(shù)據(jù)再進一步執(zhí)行基于時間正逆向計算的精對準(zhǔn)。從實際系統(tǒng)的跑車結(jié)果可驗證,經(jīng)過對準(zhǔn)及z軸陀螺漂移誤差補償后,系統(tǒng)定位精度提高了約24%,定位誤差小于2 n mile/12 h。
