淺談工業機器人啟停控制方法
2020-09-06 13:28:22吳金旭張亞軍師彥超陳爭光畢平安
汽車實用技術 2020年16期
吳金旭 張亞軍 師彥超 陳爭光 畢平安


摘 要:隨著工業4.0技術革新的到來,工業機器人在制造行業的應用得到廣泛普及,汽車行業尤為明顯。目前國內外的機器人品類繁多,而且針對不同用途(焊接、搬運、噴涂)采用不同品類、特性的機器人,一個主機廠可能擁有3類以上品牌、型號的機器人。因此需要設備人員掌握相應技術特性。文章著手對機器人啟停控制系統的梳理,歸納總結出不同類別機器人的通用技術特點,搭建底層控制邏輯,為設備工程人員開展現場安裝調試、預防維保提供參考。
關鍵詞:啟動;停止;再啟動
中圖分類號:U462 ?文獻標識碼:A ?文章編號:1671-7988(2020)16-228-04
Abstract: With the advent of industry 4.0 technology innovation, industrial robots have been widely used in the manufactur -ing industry, especially in the automobile industry. At present, there are various kinds of robots at home and abroad, and robots of different categories and characteristics are used for different purposes (welding, handling and spraying). A main engine factory may have more than three types of robots of different brands and models. Therefore, equipment personnel need to master the corresponding technical characteristics. This paper starts to sort out the robots start-stop control system, summarizes the general technical characteristics of different types of robots, builds the underlying control logic, and provides references for equipment engineers to carry out on-site installation, debugging, prevention and maintenance.
Keywords: Robot start; Robot stop; Robot restart
CLC NO.: U462 ?Document Code: A ?Article ID: 1671-7988(2020)16-228-04
1 機器人啟動控制
機器人的伺服上電主要為手/自動兩種模式,手動模式下,安全回路正常時(因為要手動示教,安全門在此模式下可以不啟用)按下機器人的伺服準備按鈕,機器人處于待機狀態,按下示教啟動開關,伺服使能開始示教。自動模式相對復雜,本文重點講解在自動模式下的機器人啟動控制邏輯。
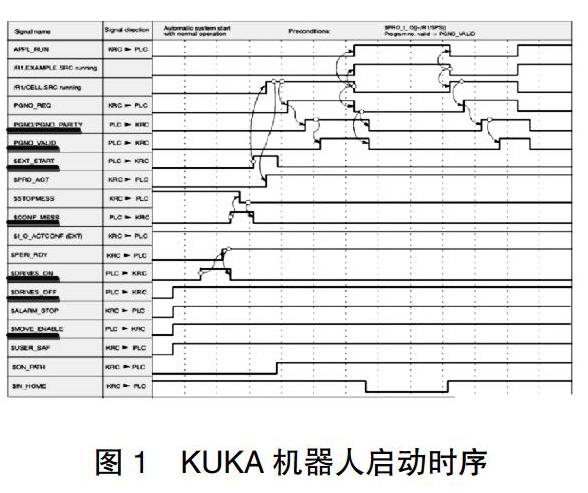
1.1 KUKA機器人啟動
1.1.1 伺服使能—DRIVEON/OFF
初始狀態下,機器人在HOME位,DRIVE_OFF要一直給定ON的信號,DRIVE _ON是在機器人自身安全回路、外部光電、光柵OK且PRI_RDY為OFF時,05s之后接通。當0.5s接通之后,PRI_RDY反饋為ON,此時DRIVE_ON置為OFF。
1.1.2 動作可能—MOVE_ENABLE
在沒有外部急停(安全門、光柵、掃描儀等)故障時,發MOVE_ENABLE信號且一直為ON 的信號。MOVE_ ENABLE為ON,且STOP_MESS信號反饋為1時,延遲50ms后PLC發給機器人脈沖信號CON_MASS(當CON_MESS為1時,STOP_MESS會被置位0)。
1.1.3 Submit程序解釋器啟動—Cell程序運行
在自動模式下,STOP_MESS為0且在HOME位,機器人執行程序激活(PRO_ACT)反饋為0時,機器人準備OK(PERI_RDY),按下啟動按鈕信號,EXSTART發出脈沖信號,PRO_ACT被置為1。
1.1.4 用戶程序執行
機器人發送程序號請求,PLC將車型號發送給機器人,并比對機器人反饋的程序號與PLC發送的程序號,程序號一致則由PLC發出PGNO_VALID,機器人開始執行用戶子程序。
1.1.5 自動模式下的循環執行
在無外部異常情況(急停安全類故障、一般性故障)時,MOVE_ENABLE信號常ON,DRIVE_OFF信號常OFF,DRIVE _ON首次啟動為脈沖信號,機器人運行時為常OFF,STOP_MASS信號為OFF,PRO_ACT為常ON信號,PGNO_ REQ和PGNO_VALID信號間隔性通斷。
1.1.6 機器人再啟動
當機器人出現外部異常情況(急停安全類故障、一般性故障)時,在機器人的內部STOP_MASS信號為ON,MOVE_ENABLE信號為OFF,EX_START信號被復位,但是ON_PATH和PRO_ACT信號不受影響,一直為ON的信號,此時需要我們將異常情況解除,故障復位后,MOVE_ENABLE信號為ON。
1.2 安川機器人啟動
圖2為安川機器人啟動時序,類比ABB機器人,除伺服使能和外部啟動外,兩者都可以不用MOVE_ENABLE動作可能信號(動作可能的意義就是在其信號為OFF時,機器人處于停機狀態,安川與ABB通過與PLC建立STOP指令來實現的,這個異曲同工),安川機器人的伺服使能和外部啟動可以用硬線連接控制(如圖3所示)。
另外安川機器人的MASTER程序是需要提前用戶來建立和定義的,建立后方可編程。
1.3 ABB機器人啟動
ABB啟動控制相較KUKA更直觀,核心點就是MOTOR _ON,MOTOR_OFF用于伺服上電使能,CYCLE_START用于動作可能(程序循環開啟),在這里也可不配置此信號點直接用示教器上面的啟動按鍵做動作可能, EX_START用于MAIN(CELL)程序啟用,當接收到PLC發生的程序號及校驗有效時,機器人執行用戶程序。
1.4 NACHI機器人啟動
NACHI啟動參考KUKAD 啟動時序,其中NACHI機器人作為固定信號輸入輸出不可變更,通用信號輸入輸出部分可以根據現場需要在“輸入輸出信號”中設定相應的信號點,比如程序號、啟動、停止信號。關于程序掃描類比KUKA,做了一個“外部個別停止”等同于MOVE_ENABLE和CYCLE_START。
1.5 機器人啟動總結——核心前置三要素
1.5.1 伺服使能
首先機器人要啟動,核心就是機器人伺服使能(無論是DRIVE_ON、MOTOR_ON,還是SEVER_ON),它是驅動硬件系統的硬性需求,在伺服使能狀態下,各機器人軸電機勵磁,制動抱閘打開。
1.5.2 動作可能
在伺服使能過后,自動模式運行情況下,通過(MOVE -ABLE、外部個別停止、CYCLE_START等命令)讓機器人系統啟動起來,當出現一般性停止時(第二章節講到),上述信號置為OFF,機器人斜坡停止,無抖動現象。
1.5.3 機器人外部啟動
當機器人伺服使能、動作可能都OK時,PLC滿足其他條件后會給機器人發EX_START信號(這一點所有機器人都是相通的),機器人進入MAIN循環程序,此時機器人并不執行用戶程序,當接收到PLC發送的程序號且校驗程序號有效之后才開始執行用戶程序。
2 機器人停止控制
2.1 KUKA機器人停止
KUKA機器人的停機模式可分為安全類故障和非安全類故障停止,安全停止0和STOP0的安全等級最高,并依次降低,等級越高對機器人的動態制動響應越快速,制動越快不僅會導致其本體的抖動,對機械傳動系統也存在損傷,所以應盡量避免高等級故障停止的發生。
2.2 安川機器人停止
安川機器人的停機方式也有以下幾種原因:
2.2.1 暫停操作
執行暫停后,機器人暫時停止,暫停可用如下裝置上的 [Hold]完成,它可以通過示教編程器(白色暫停按鈕)、外部輸入信號(PLC與機器人的IO配置STOP信號點)。
2.2.2 急停操作
急停操作后,伺服電源被切斷,機器人立即停止,它可以通過安全門、示教器、外部輸入信號(這里的外部輸入信號給定的急停往往都是來自PLC的安全輸出模塊)。
2.2.3 報警引起的停止
動作過程中發生報警后,機器人會立刻停止動作。示教編程器上顯示出報警畫面,通知用戶由于報警引起了停止。
2.2.4 其他停止
再現過程中,從再現模式切換到示教模式時機器人立即停止,執行 PAUSE 命令,使機器人暫停。
2.3 ABB機器人停止
將安全面板的XS9的5腳與6腳、11腳與12腳的連接斷開,機器人就會進入自動停止狀態,AS1與AS2要分別單獨接入無源NC常閉觸點,AS1與AS2要同時使用。
將安全面板的XS7與XS8的第1腳與2腳的連接斷,機器人就會進入緊急停止狀態。ES1與ES2要分別單獨接入無源NC常閉觸點,ES1與ES2要同時使用。
將安全面板的XS9的5腳與6腳、11腳與12腳的連接斷開,機器人就會進入自動停止狀態。AS1與AS2要分別單獨接入無源NC常閉觸點,AS1與AS2要同時使用。
2.4 NACHI機器人停止
NACHI與 KUKA機器人的停機方式相近,分為安全類停機與一般故障類停機,安全類停機中也是通過安全電路板與外圍安全裝置連接,可以通過PLC安全模塊互聯或者是安全繼電器觸點連接。
2.5 停止總結—常見停機分類
2.5.1 一般性故障停機
當PLC發送給機器人的動作可能信號由ON置為OFF時,機器人以及附加軸沿軌跡的制動斜坡制動,此時伺服驅動系統不會關閉,制動器不制動,伺服電機處于勵磁等待狀態,機器人減速平穩停機,無抖動現象。
2.5.2 高級故障停機
當機器人控制系統內部與安全無關的部件出現內部故障,則驅動系統立即關閉,制動器制動,機器人在額定位置快速制動,本體存在抖動現象(如電機過負荷、編碼器異常等故障)。
2.5.3 安全性停機
當機器人安全控制系統或外圍安全設施異常時,驅動系統立即關閉,制動器制動,機器人快速制動,這種停機方式會使得機器人瞬間停機,存在抖動現象。
3 機器人停機再啟動
當機器人因為各種原因停機后,再啟動首先需要對機器人停機的原因查明并解除相應故障風險點,按下RESET鍵(可以是PLC或者示教器,視具體情況來定)使機器人滿足再次開啟的前置條件,再啟動與首次啟動不同,因為絕大部分情況機器人已經不在HOME位置而是在運行過程中(運行軌跡程序或是邏輯程序),這個需要PLC的再啟動邏輯并行控制機器人的啟動指令,當故障解除且復位后再次按下啟動鍵,并可再次運行機器人。
4 結論
機器人啟停控制中,雖然不同品牌的機器人各有特點但是其核心的邏輯架構是一致的,無論是前期設計調試還是后期故障維保,抓住主線,摸清脈絡就能準確、快速的解決疑難問題,以上是作者對工業機器人啟停動控制邏輯的一些淺見,文章描述過程中不免有不足之處,敬請同行給予指正。
