空間星光測量技術研究發展綜述
2020-09-10 04:05:42袁利王苗苗武延鵬王立鄭然
航空學報 2020年8期
關鍵詞:測量
袁利,王苗苗,武延鵬,王立,鄭然
1. 北京控制工程研究所,北京 100190
2. 空間智能控制技術重點實驗室,北京 100190
隨著航天技術的發展與應用,人類的活動范圍已經由地球表面延伸到外層空間,探索和開發太空資源的熱潮高漲。未來太空作戰的趨勢逐漸加劇,使得空間在政治、經濟、軍事等方面的戰略地位日益提高。以大比例尺測繪衛星、自主導航衛星、光學成像偵察衛星、目標監視預警衛星等為代表的高性能衛星是未來空間優勢的基礎,也是航天強國的重要標志。如何獲取精確的姿態、指向等信息來保障高性能衛星順利完成各項空間任務成為世界各國亟需解決的問題。
空間星光測量技術一般是指以已知準確位置的恒星天體為基準,通過光電探測方式對恒星成像并進行圖像信息處理,最終解算空間飛行器的姿態、指向等關鍵信息的技術。包含星光測量理論方法及測量儀器,覆蓋光學、機械、電子學、熱學等多門學科,難度大且具有重要的戰略應用價值。相比于其他測量手段,星光測量方式不受干擾、自主性好、可靠性高、精度高。目前測量精度已達到亞角秒級,如美國的AST-301星敏感器,測姿精度為0.54″(X/Y軸, 3σ)[1],國內的超高精度星敏感器[2],測姿精度為0.3″(X/Y軸, 3σ)。
新一代高性能衛星所肩負的空間任務更加多樣化、復雜化,因此對空間星光測量技術提出了更高的要求。本文總結了典型空間星光測量敏感器及其應用技術的研究進展,分析了當前存在的關鍵技術問題,并展望了未來重點研究方向,旨在為業內人員提供一些參考。
1 研究進展及發展態勢
空間星光測量技術最初是基于恒星星光矢量確定航天器的慣性姿態。多年來,得益于核心技術的發展以及任務需求的牽引,典型的空間星光測量敏感器及其應用技術均得到了迅猛發展。
1.1 星敏感器研究進展
作為典型的空間星光測量敏感器,星敏感器的研究起步于20世紀50年代。早期的星敏感器受限于析像管探測器[3]的穩定度、尺寸、重量、磁效應和高壓擊穿等問題,難以進一步發展和使用。20世紀70年代初期,電荷耦合器件(Charge Coupled Device, CCD)技術的出現以及集成電路的發展為星敏感器的換代提供了良好的契機,更大視場和像素陣列的CCD星敏感器研制成功[4]。此類星敏感器缺少自主星圖識別和姿態計算功能,屬于非自主式星敏感器。20世紀80年代中期,隨著高速微處理器以及大容量存儲器的出現,CCD星敏感器實現了全天區自主星圖識別和實時姿態角輸出[5-6]。20世紀90年代,有源像素傳感器 (Active Pixel Sensor, APS)技術開始應用于星敏感器的研制[7-12],且在重量功耗等方面更具有優勢。自此之后,自主式CCD/APS星敏感器技術日趨成熟,成為真正意義上完全自主的姿態測量部件。2000年以后,得益于探測器技術、光學設計加工工藝以及信息處理技術的突飛猛進,星敏感器綜合性能大幅提升,國內外在精度、動態性能、數據更新率、輕量化[8,13-14]等方面均取得了長足的進展,形成了豐富的產品體系。
在精度提升方面,當前主流產品為3″~15″(X/Y軸, 3σ)的高精度星敏感器;少數產品為優于1″(X/Y軸, 3σ)的甚高精度星敏感器,即突破了亞角秒級測量精度水平。
高精度星敏感器的典型代表有:德國耶拿公司(Jena-Optronik)開發的ASTRO 15[15]、ASTRO APS星敏感器[16],法國索登公司(SODERN)的SED16、SED26星敏感器[17],意大利伽利略公司(Galileo)的A-STR、AA-STR星敏感器等[13]。國內高精度星敏感器的研制和發展同樣非常活躍。北京控制工程研究所、北京航空航天大學、清華大學、上海航天控制技術研究所以及中國科學院下屬研究所等多家單位均有代表性的高精度產品[2],此處不作詳述。綜合調研結果,此類產品一般采用一體化結構設計,視場范圍10°~30°,重量為2~3 kg左右,壽命能夠達到10~18年, 多應用于遙感衛星及導航衛星上,覆蓋高中低軌。選取國內外目前在軌運行較多的高精度CCD/APS星敏感器,其主要技術指標對比如表1所示。
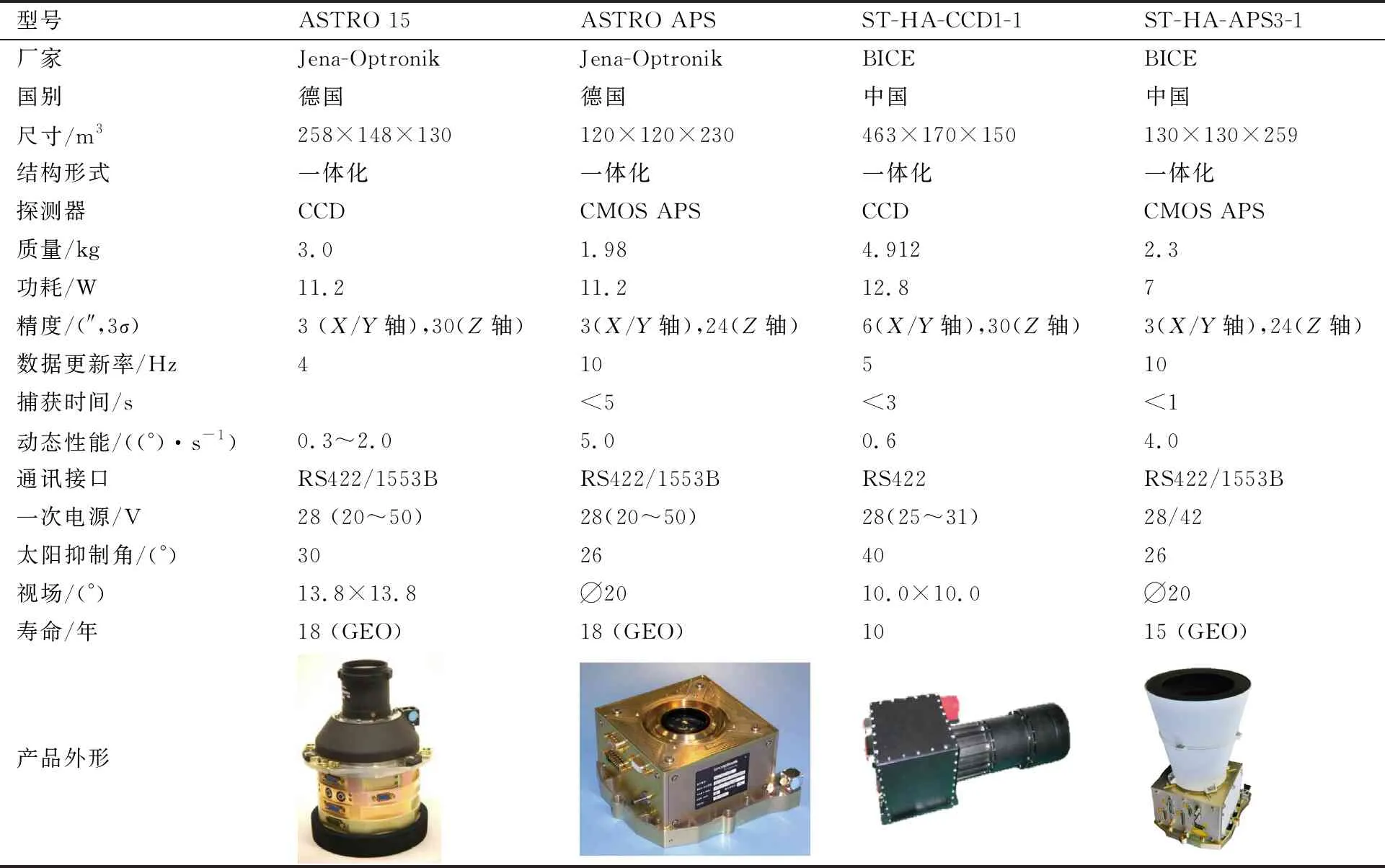
表1 國內外典型高精度星敏感器技術指標
通過表1中數據對比可知,APS高精度星敏感器比CCD高精度星敏感器的體積重量更小,功耗更低。國內高精度星敏感器在精度、更新率、動態性能、雜光抑制能力等方面與國外水平相當,在初始捕獲時間方面優于國際同類產品。
甚高精度星敏感器由于研制技術難度大、代價高,目前只有少數技術實力較強的機構有個別產品具有飛行經驗,典型代表有:法國SODERN公司為英聯邦地球觀測SPOT系列之昴宿星(PLEIADES)研制的SED36星敏感器[18-19];美國保爾公司(BALL Aerospace)研制的HAST星敏感器[20]成功應用在對地觀測衛星(Worldview)上;美國洛克西德·馬丁公司(Lockheed Martin)研發的AST-301自主星敏感器作為主要的姿態測量部件應用在噴氣動力實驗室(Jet Propulsion Laboratory, JPL)的空間紅外望遠鏡裝置(Space InfRared Telescope Facility, SIRTF)上[21];中國在更高精度對地觀測等任務需求的牽引下,近年來開展了亞角秒星敏感器技術的攻關,目前已有產品進行了飛行驗證。國內外典型甚高精度星敏感器的技術指標對比如表2所示。
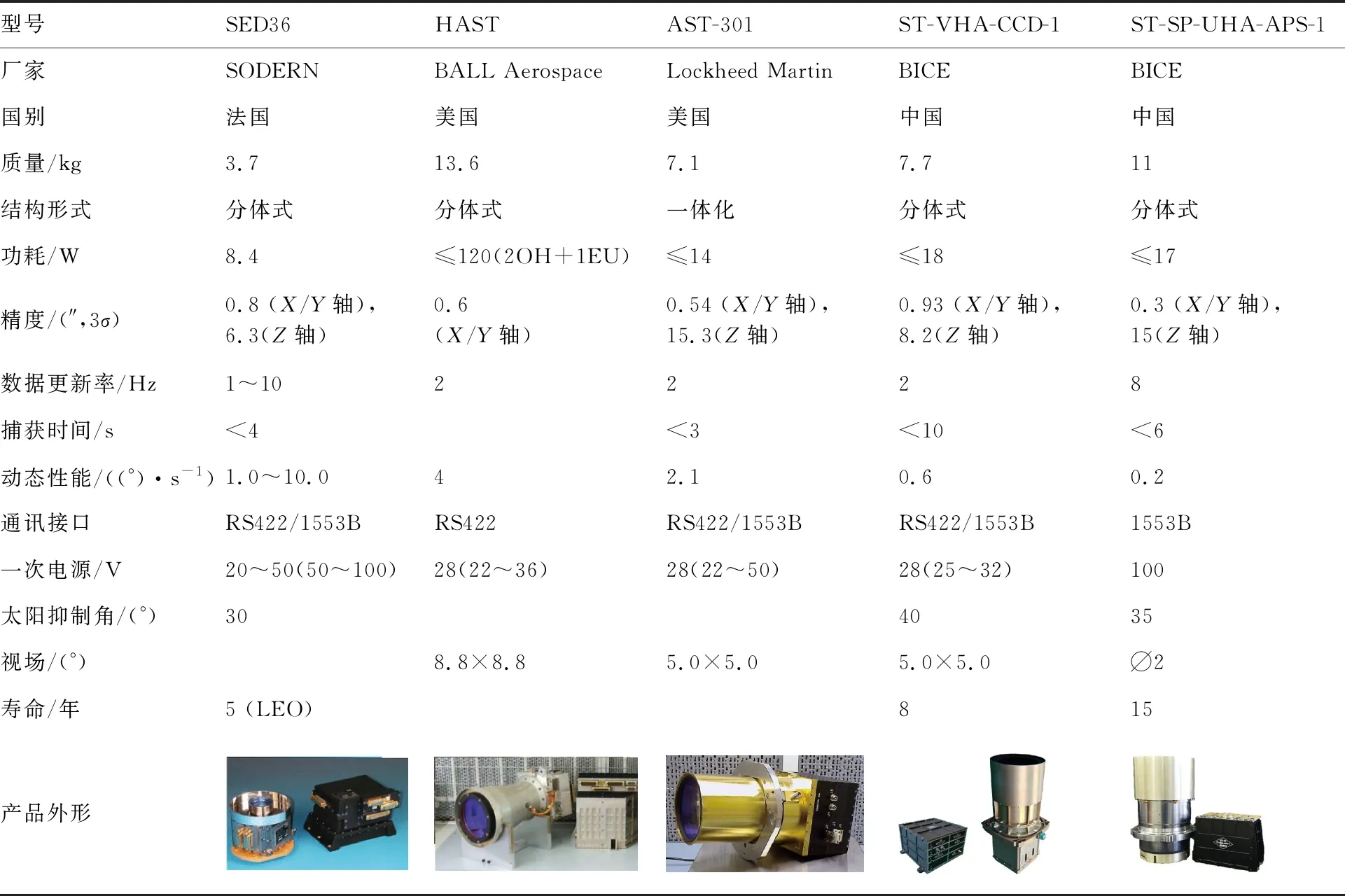
表2 國內外甚高精度星敏感器技術指標
這類產品一般選擇小視場加大面陣方案保證單星定位精度;采用分體式結構優化熱設計保證高穩定性和低熱漂;采用高精度地面及在軌標定方法提高測量精度。比較國內外典型產品技術指標可知,國內甚高精度星敏感器在測量精度上已達到世界先進水平,但動態性能存在一定差距。
在動態性能提升方面,法國SODERN公司研制的HYDRA星敏感器表現尤為突出。通過多探頭組合模式,配合高精度圖像與姿態融合處理方法,能夠實現無陀螺衛星姿態控制,可確定角速度最高達10 (°)/s,在姿態丟失的情況下,可在8 (°)/s的角速度下完成姿態捕獲,實際在軌(SPOT6衛星)正常情況下的數據更新率為16 Hz[22]。國內北京控制工程研究所、北京航空航天大學和清華大學在此領域也取得了突破性進展[2]。
在輕量化方面,首先主流產品在同等精度的條件下重量功耗越來越小,其次國內外在超高集成度結構設計技術、快速星點提取定位算法和魯棒性更好的星圖識別算法方面取得了突破,納皮型星敏感器領域碩果累累[23-28]。重量低至100 g以下,精度在3″~10″(3σ)水平的超小型高精度星敏感器研制成功,典型代表包括加拿大瑞爾森大學(Ryerson University)與辛克萊星際公司(Sinclair Interplanetary)聯合開發的ST-16(也稱S3S)星敏感器[24],國內典型代表是清華大學研制的皮型星敏感器(PST系列)[29],指標先進。
另外,國際上一些單位和機構開展了新型星敏感器的探索開發工作,如美國恒星視覺技術公司(StarVision)開發的恒星陀螺星敏感器SG100[30],以高達100 Hz的更新率輸出高精度姿態和衛星角速率,可避免陀螺零漂的現象;美國OPC公司在美國海軍項目支持下研制出的基于干涉測量的新型星敏感器[31],通過增加光學干涉前端,解耦了光學鏡頭、探測器分辨率與測量精度之間的關系;加拿大瑞爾森大學的研發團隊開發的彩色星敏感器[32],將恒星顏色信息引入到傳統的幾何匹配模式中,但由此帶來的信噪比下降、星數不足等問題尚待解決。
1.2 應用技術研究進展
目前國際上已將空間星光測量技術應用于高精度空間目標監視與定向、載荷基準監測及標校、激光慣性指向測量等任務中。
1.2.1 空間目標監視與定向應用
基于星光測量技術進行空間目標監視的原理如圖1所示:在某監視任務時段內,測量敏感器對指向天區恒星背景及空間目標連續成像。通過恒星提取、識別及匹配獲得慣性姿態的同時,利用目標與背景恒星所表現出的運動特性差異,進行目標證認。最終根據慣性姿態及目標相對位置可確定其慣性空間指向。此處的空間目標包括人造天體、X射線源等。
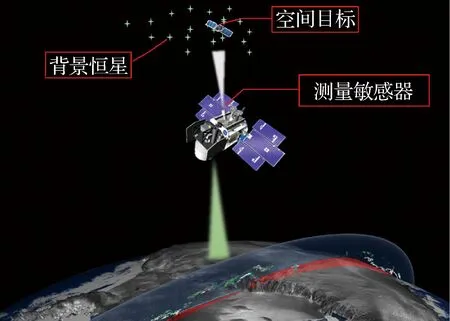
圖1 空間目標監視場景
國外在這方面開展過很多研究工作。如圖2所示:美國早在1996年發射的空間中段試驗衛星(Midcourse Space experiment, MSX)[33-34],搭載天基可見光相機(Space-Based Visible, SBV),進行了關鍵技術驗證。該相機的指向測量精度達到0.8 ″(1σ),可對7~15等星亮度的衛星進行探測和定向。
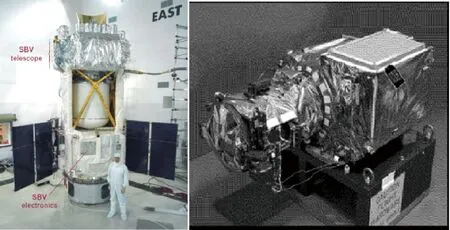
圖2 美國中段試驗衛星上的天基可見光相機[34]
之后,美國發射了天基空間目標監視系統(Space-Based Space Surveillance system, SBSS)的首顆衛星,SBV正式轉為美國空間監視網的一部分[35]。除此之外,NASA的自主交會技術演示衛星(Double Asteroid Redirection Test, DART)[36]和美國國防高級研究計劃局(DARPA)的“軌道快車”(Orbital Express, OE)任務[37]均采用空間星光測量技術進行追蹤衛星和目標衛星之間距離、相對方向和姿態的測量。
美國NASA于1999年發射的Chandra X射線衛星,如圖3所示,其上配置有保爾公司研制的方位測量相機(Aspect Camera),能夠為衛星提供實時的姿態數據,并對X射線源定向觀測,測量精度達到0.2″(1σ)[38-39]。

圖3 Chandra X射線觀測衛星上的方位測量相機[38]
美國海軍計劃部署天基聯合毫角秒探路者測量任務(Joint Milli-Arcsecond Pathfinder Survey mission, JMAPS)[40-41],如圖4所示。該任務擬通過在衛星平臺上安裝光學望遠鏡的方式,對14等星亮度的空間目標進行觀測,以期達到毫角秒級的指向確定精度,支持星間定向和衛星定位。
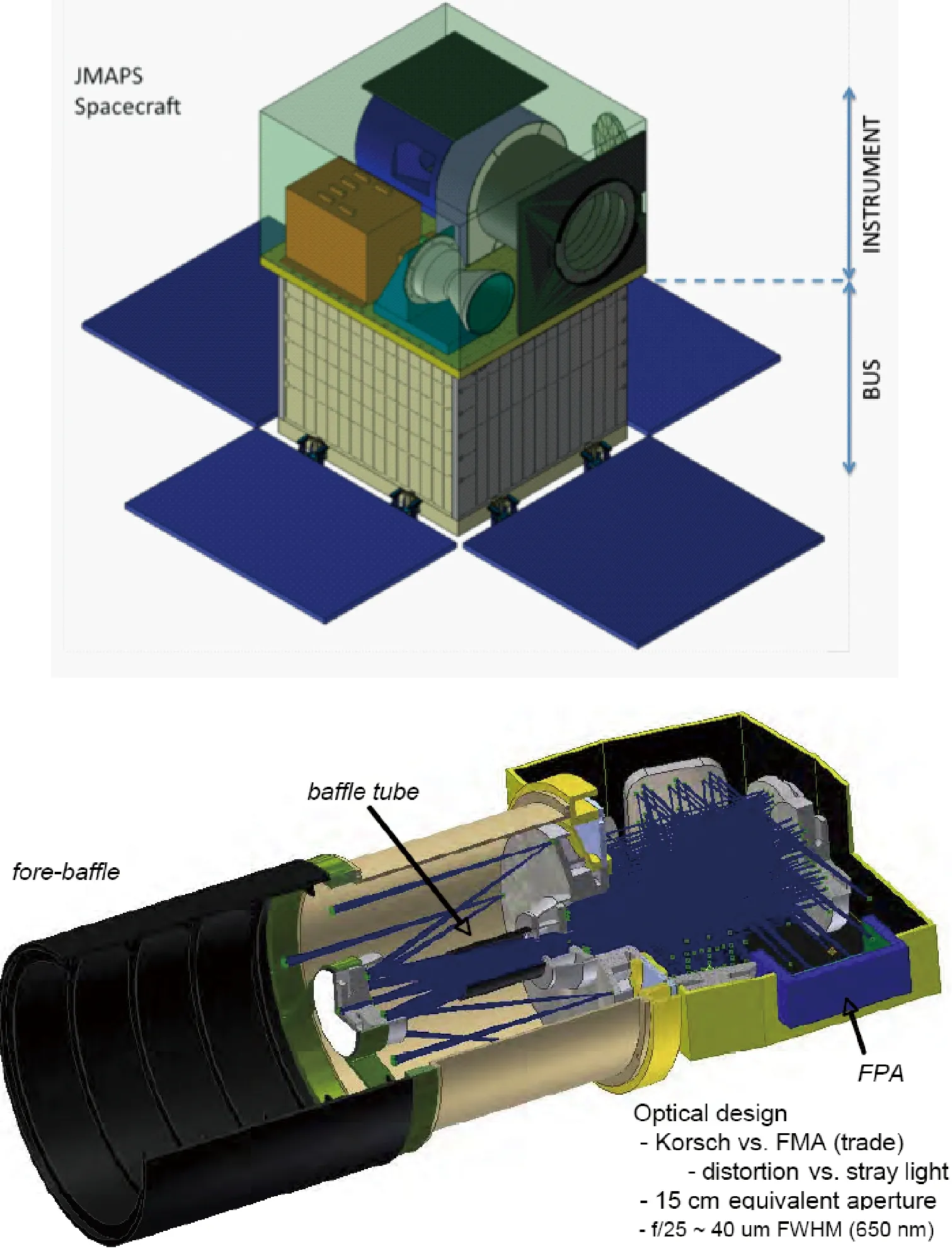
圖4 美國JMAPS任務概念圖[40]
加拿大的藍寶石(SAPPHIRE)任務[42]中同樣采用了光學探測敏感器OIS來確定人造天體的慣性指向,如圖5所示。該敏感器指向測量精度優于1 ″(1σ)。
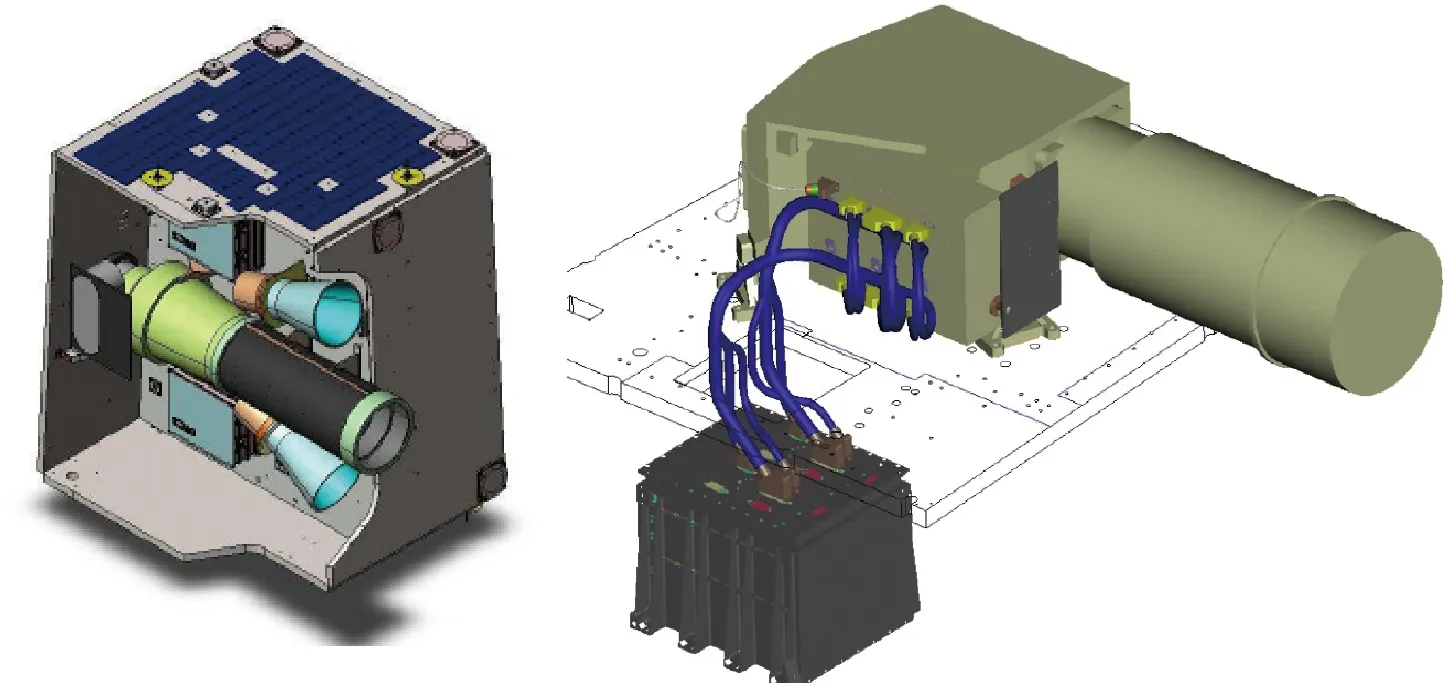
圖5 加拿大藍寶石衛星SAPPHIRE上的OIS相機[42]
國內西安光學精密機械研究所、北京空間機電研究所、北京控制工程研究所等多家單位均開展了目標監測及星間方向測量的應用研究,一些星相機產品已進行了在軌飛行驗證。由調研情況可知,目前國內可以對目標衛星進行捕獲識別,但在目標定軌編目方面與國外還存在差距,尚未建立健全的空間目標監視網絡。
1.2.2 載荷基準監測及標校應用
載荷的基準是否發生變化在一定程度上決定了其工作質量。例如對地觀測相機的視軸指向與星敏感器所在姿態測量系統之間的關聯基準精度將直接影響衛星的地面定位精度。一般情況下通過機械固聯方式能夠減小一部分基準傳遞誤差,但無法避免軌道力、熱環境變化帶來的變形影響。目前國際上一些天文觀測衛星已經將空間星光測量技術應用于基準監測及標校。主要思路是通過主動光源引光建立星上載荷及整個工作鏈路上測量部件之間的聯系,實時監測和修正基準漂移。
德國的X射線衛星(Roentgen Satellite, ROSAT)[43-44],其基準監測原理如圖6所示。通過安裝在載荷焦面的主動光源發射光線,經過棱鏡折轉后進入到星敏感器的視場內成像,從而計算得到載荷光軸和星敏感器光軸之間的實時角度關系,用于觀測數據的事后修正和處理,測量精度1″(1σ)。
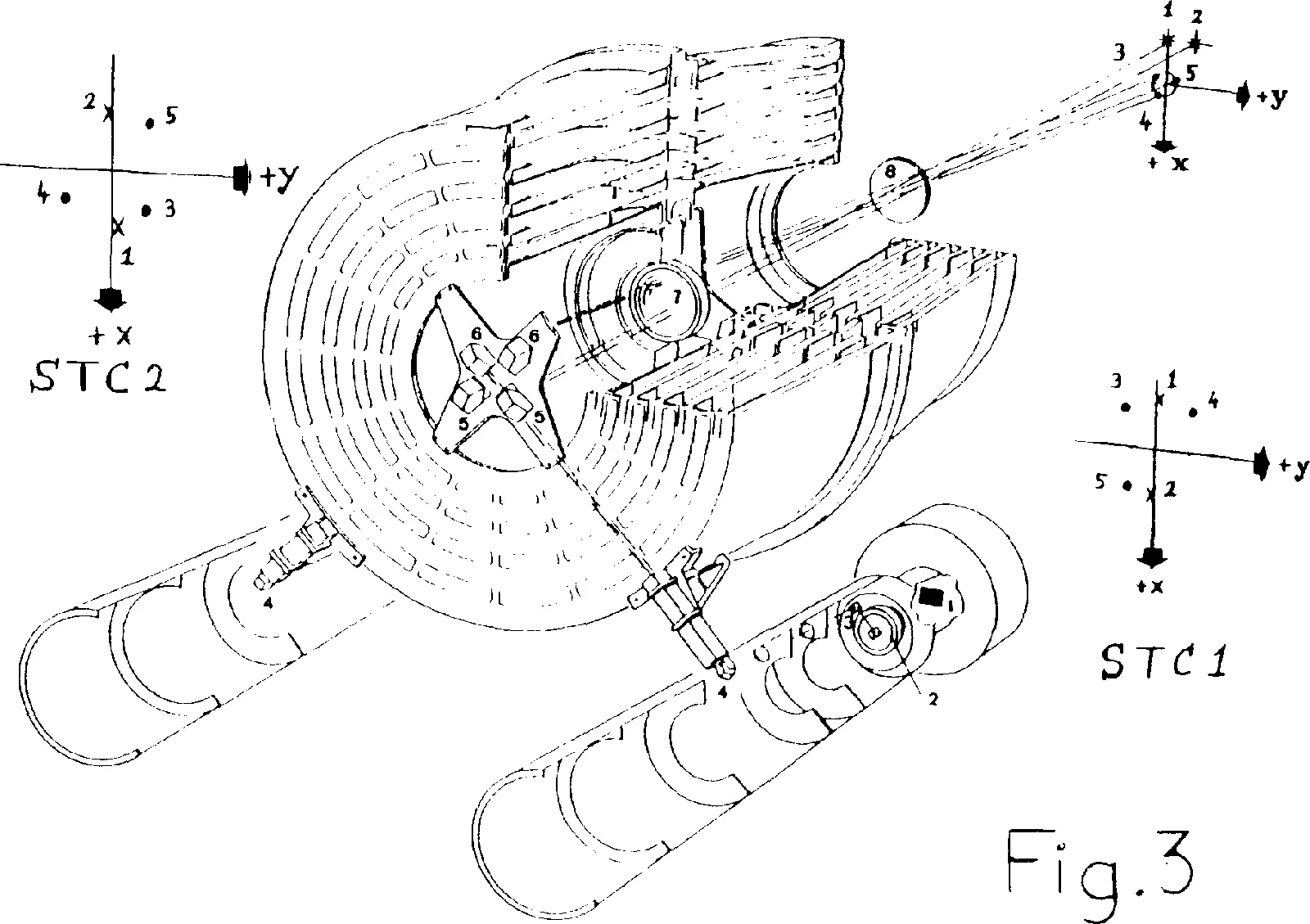
圖6 德國X射線衛星上的基準光路監測方案[43]
前蘇聯資源和偵察衛星系列上所用的星相機產品,同樣通過基準光路設計將基準光點和恒星成像在同一探測器上,以實現基準監測功能,測量精度為亞角秒量級。
從以上典型實例可知,空間星光測量技術在載荷基準監測方面的應用與目標監視原理基本相同,區別是載荷主動光源發出的光線作為參考光,可以通過光學成像鏈路設計及主動調制。國內目前尚未有此類通過參考光的有效監測得到姿態測量儀器與衛星平臺、載荷之間的基準傳遞關系并進行有效標校的應用實例。
1.2.3 激光慣性指向測量應用
空間星光測量技術也可直接服務于星上載荷。國際上已有基于恒星矢量確定激光測高儀發出的激光光束的慣性指向,從而進行高精度高程定位的應用案例。美國2003年發射的對地觀測激光測高衛星(Ice, Cloud and land Elevation Satellite, ICESat)[45],專門設計恒星參考系統(Stellar Reference System, SRS)確定激光的慣性指向。圖7給出了激光指向測量方案,即采用常規星敏感器(Instrument Star Tracker, IST)、激光參考相機(Laser Reference Sensor, LRS)以及激光輪廓敏感器(Laser Profile Array, LPA)獲取恒星及激光光斑圖像,利用圖像信息處理技術計算各光斑之間的關聯,最終確定激光光束的慣性空間指向。測量精度為1.5″(1σ)[46],實現了陸地地貌、冰蓋高程變化的精確測量。
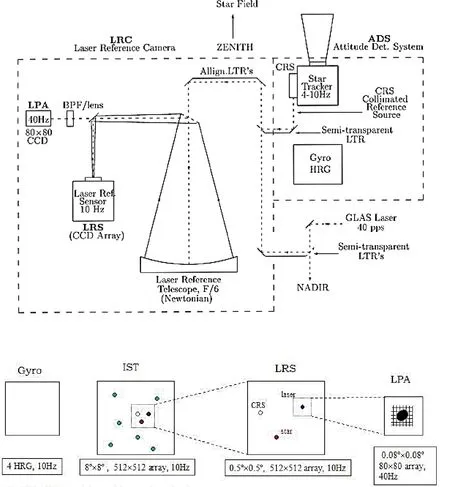
圖7 恒星參考系統方案[46]
后續的ICESat-2[47]衛星采用同樣的原理確定激光慣性指向。在ICESat基礎上對激光指向測量方案進行了優化設計,避免了ICESat衛星因LRS激光參考相機視場較小而難以保證在載荷工作的全周期內均有恒星可以穩定提取的問題。ICESat2衛星上先進地形激光測高系統(Advanced Topographic Laser Altimeter System, ATLAS)的布局如圖8所示,其中激光參考相機LRS可對恒星和地面返回的激光同時成像。
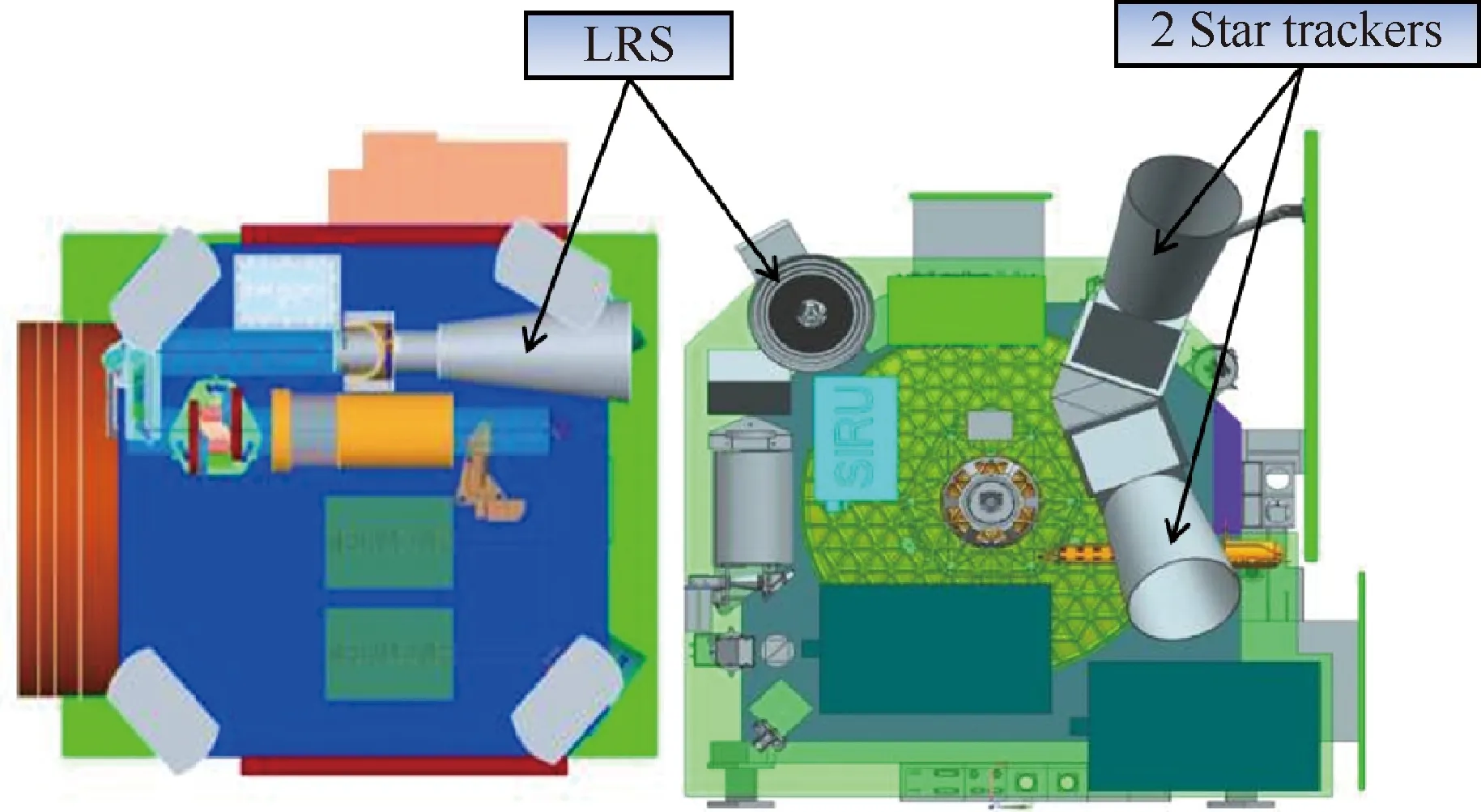
圖8 先進地形激光測高系統在冰二衛星上的布局[47]
目前國內的研究多集中在理論和應用開發階段,尚無在軌應用的實例。面向后續遙感衛星的應用需求,如何利用空間星光測量技術高精度高可靠地確定載荷激光慣性指向,將成為研究重點。
1.3 發展態勢
通過以上調研可知,空間星光測量技術發展迅猛,敏感器技術及其應用技術均取得了豐碩成果。總結其發展態勢如下:
1) APS器件光電性能已全面趕超CCD,加上其集成度高、功耗低等優勢,已經逐步取代CCD器件在星敏感器中得到廣泛應用。但CCD在TDI/EMCCD等方面仍具備一定優勢,繼續在高端產品中發揮作用。
2) 處理器性能以及光學設計加工技術的迅猛發展,非球面技術已經引入星敏感器中,使得產品指標不斷提升。高精度、高可靠、輕量化、低功耗的星敏感器目前已廣泛應用于多種空間任務中。高穩定性低熱漂的光機結構設計、高精度誤差標定技術的突破使得測量精度達到亞角秒量級。
3) 高幀率成像技術、動態補償技術、多探頭信息融合等關鍵技術的突破,促使星敏感器動態跟蹤能力大幅提升,最高達到10 (°)/s以上。動態條件下的測量精度不斷提升,能夠更好地服務于衛星高分辨率對地觀測任務。
4) 恒星陀螺、干涉星敏、彩色星敏等新型星敏感器在不斷探索中,能夠在一定程度上解決傳統星敏感器面臨的問題,但同樣帶來了一些新的挑戰。
5) 空間星光測量技術應用已擴展至目標監測、星上基準監測、激光慣性指向測量等領域,空間星光測量敏感器開始服務于光學載荷或者進一步擴展作為光學載荷存在。
2 關鍵技術問題
空間星光測量技術發展至今雖然已取得了豐碩成果,但是要進一步滿足更加精細、復雜以及多樣化的空間任務需求,尚存在一些關鍵性問題。
2.1 低頻誤差抑制及標校問題
國內外對星敏感器誤差的分類已經有充分認識,其中變化周期為幾秒至一個軌道周期的表述為低頻誤差[48-49]。近年來星敏感器高頻誤差改善明顯,而與軌道力、熱、光等空間多物理場相關的低頻誤差逐漸成為制約測量精度進一步提升的重要因素[50-52]。
針對低頻誤差國內外研究人員提出了較多標校方法,一種是事后處理或離線處理方式:包括姿態控制系統層面的濾波方法[53-56]和基于地標信息的離線校正方法等[57-58],但此類方法沒有從源頭上解決問題。另一種是從星敏感器自身出發的抑制方法:主要包括通過標定降低視場空間低頻誤差的方式和通過熱穩定性設計降低溫度變化帶來的低頻誤差的方式。如法國SED36星敏感器一方面采用多項式校正和多區域再次校正的方法大幅降低了視場空間低頻誤差,另一方面設計了恒溫系統,用鈦/碳化硅結構替代鋁合金架構,降低了溫度交變帶來的低頻誤差;美國AST-301在地面做性能試驗時,即通過搜集多個星場數據,基于最小二乘擬合法重新計算標定系數。由于采集星場的隨機性,恒星的星等、數目、顏色等信息均在地面試驗中被平差掉,因而其結果更適用于在軌情況;美國HAST星敏感器則采用圓視場標定方法降低視場標定殘差,采用高穩定的結構和光學設計降低光軸熱漂移;國內隋杰等[59]開發了熱力光聯合仿真分析方法,為星敏感器光軸熱穩定性評估提供了分析手段和設計指導工具;以光機電集成設計為依托,進行了光機結構高穩定設計,陳建峰等[60]基于Bipod結構進行了遮光罩安裝結構優化設計,極大改善了結構熱穩定性。
綜合以上研究現狀可知,目前國內外對低頻誤差補償的重要性已有充分認識,并提出了一些針對性抑制方法,取得了一些成果。但仍存在以下問題:
1) 在姿態測量系統層面,用于低頻誤差分析的數據源單一,沒有引入更多的參考數據進行分析比對,限制了誤差分析的精度和可信度,不適應低頻誤差多變量影響的復雜規律建模與辨識。
2) 星敏感器低頻誤差在線辨識和補償研究仍停留在一階內方位元素的水平,高階畸變和視場依賴誤差的辨識研究還存在空白。
3) 相機與星敏感器間的夾角穩定性誤差方面考慮較少,光軸在軌監測技術研究較為薄弱。
2.2 亞角秒級動態測量精度問題
近年來,高分辨率光學衛星影像分辨率逐漸從米級提升到亞米級,借助整星大范圍敏捷機動能力,能通過沿軌道方向前后擺動獲取同軌立體像對,具備了實現大比例尺測繪的必要條件。而星敏感器在小角速度條件下的測量精度已經達到亞角秒級,若高動態條件下仍能保持這一測量精度,則可為大比例尺立體測繪等任務提供超敏捷的動中成像能力。因此,亞角秒級動態測量精度已經成為亟待解決的關鍵問題。
就星敏感器設計而言,高動態、高精度是相互矛盾相互制約的因素,難以兼顧。亞角秒級精度的星敏感器一般需采用小視場高分辨率以獲得較小的像元等效角來提高單星定位精度;高動態性能則需要大視場較大的像元等效角以減小角速度運動時產生的拖尾現象。若縮短曝光時間則信噪比下降,根據克拉美羅下界(Cramer-Rao Lower Bound, CRLB),星點位置精度將大幅下降,實現亞角秒難度很大。
當前國內外的亞角秒星敏感器在動態方面采取了一些積極的措施:AST301星敏感器采用自主延時積分方法進行X軸向的圖像運動補償,保證了2.1 (°)/s下的X軸精度;采用圖像運動調節方式處理圖像拖尾,得到最佳信噪比的合成圖像,實現Y軸0.42 (°)/s速度下的精確跟蹤[21]。HAST星敏感器在1 (°)/s角速度條件下的0.2″(1σ)測試能力和4 (°)/s的高動態條件下跟蹤性能,使得WorldView衛星獲得了空前的實時性和重訪能力。多探頭星敏感器則是通過多視場組合方案,實現動態跟蹤能力的大幅提升。就研究現狀而言,亞角秒級精度水平的星敏感器均未達到10 (°)/s 以上的動態能力,尚不能滿足超敏捷衛星動中成像需求。
2.3 極高精度目標指向測量及定軌問題
目前,空間星光測量技術在目標監測證認方面已進行了關鍵技術驗證并取得了不錯的效果,指向測量精度達到了亞角秒水平,但是這對于目標精確定位、跟蹤打擊等軍事應用還遠遠不夠。要進一步提升至毫角秒級指向測量精度水平,存在以下難題需要解決:
1) 毫角秒級參考基準精度與毫角秒級測量精度需求之間的矛盾。一切天體和人造物體均在運動中,包括太陽系天體的運動、地球的公轉自轉效應、航天器的運動和抖動、恒星的運動等,對于指向測量儀器的參考基準恒星可產生嚴重影響,這其中的光行差、視差、引力偏折等天文效應在牛頓笛卡爾框架內修正,修正精度在幾十個毫角秒量級,且隨航天器和儀器指向的變化而變化。這樣的修正精度對于目前高精度及甚高精度的星光測量敏感器而言是足夠的,但是要進一步提升至毫角秒量級,則無法滿足使用需求。
2) 呈指數增長的恒星背景與遠距離空間小目標高精度定位的矛盾。目標尺寸小、距離遠、特性未知、太陽相位角不等等因素導致空間目標能量暗弱且多變。假定目標近似球狀,相位角為0°,表面反射率0.2,視場1°×1°,要觀測10 cm@1 000 km目標,靈敏度達到12.5 Mv,銀道區域內恒星有500顆以上;而要觀測1 cm@1 000 km目標,靈敏度要達到17.5 Mv,視場內恒星有5 600顆。要獲得更高的目標指向測量精度,一方面需要從密集恒星背景中有效提取出目標,另一方面需要對暗弱目標進行極高精度的定位,傳統的細分質心定位法已經不能滿足目標定位精度需求。這就給敏感器設計和信息流處理帶來巨大挑戰。
3) 目標編目定軌和有限觀測數據的矛盾。精確編目需要長期多時段證認數據,然而當前儀器僅能完成有限弧段觀測,數據相關性大;目標長時間運動特性復雜,或速度變化快,或曲線運動,目標易出視場關聯不上;不同視角目標光變曲線給目標提取、分類、證認帶來現實困難。
3 未來重點研究方向
結合以上技術進展、應用情況以及存在的關鍵問題,可以預測到空間星光測量技術未來重點研究方向主要包括:
1) 極高精度。隨著美國JMAPS巡天任務的推進,測量精度需求將進一步提高至毫角秒水平。無論是姿態測量精度還是目標的指向測量精度一旦達到毫角秒量級,將能夠大幅提升遙感測繪、天基攻防以及自主導航衛星的性能。要實現由當前的亞角秒級精度至毫角秒級精度的躍升,將面臨巨大挑戰。恒星參考基準、多物理場的影響、地面標定和精度測試技術均需要深入研究。
2) 高動態。遙感任務高時間分辨率和立體成像的需求發展,對星敏感器機動過程中測量精度要求越來越高。敏捷衛星為實現立體成像,姿態機動角度大且頻繁,衛星姿態穩定度較差,要求星敏感器能夠實現高動態條件下的高精度測量。如何顯著提升動態測量精度,是未來所要突破的關鍵技術瓶頸。
3) 多功能。空間目標監視、慣性指向測量等應用需求對空間星光測量敏感器提出了更多的要求。目前多為監視相機與傳統星敏感器進行配合達到測量目的,但這種級聯方案組成復雜,可靠性低。基于現有的技術積累研究慣性指向測量、目標監測及跟蹤、星上基準監測等多功能集成化的空間星光測量儀器也是未來主要發展方向之一。
4) 智能化。人工智能方法,可以從大數據中挖掘知識信息,具有自主學習、處理速度快的特點,在越來越多的領域中得到了廣泛的應用。機器學習、深度學習算法層出不窮,以圖形處理器(Graphics Processing Unit, GPU)、并行計算架構(Compute Unified Device Architecture, CUDA)、張量處理單元(Tensor Processing Unit, TPU)等為代表的并行計算以及神經網絡硬件平臺技術快速發展,皆為人工智能方法在空間星光測量敏感器中的應用提供了重要前提和保障。若采用人工智能方法,必將極大提高信息處理能力,為目前星光測量敏感器對空間環境多物理場的自我感知能力較弱、密集星場下的目標證認困難等問題提供新的解決方案,推動敏感器向智能化方向發展。
4 結束語
空間星光測量技術利用星光矢量信息進行姿態確定、慣性指向測量、基準監測,對于保證順利完成航天器各項空間任務具有十分重要的意義。通過對國內外研究現狀調研可知,星敏感器作為典型的空間星光測量敏感器,目前已達到亞角秒級精度水平。國際上對于目標慣性指向測量、星上基準監測等應用技術的研究促使星敏感器功能擴展為星相機、指向參考相機等,可服務于光學載荷或者作為載荷本身存在。在當前大比例尺測繪衛星、高分辨率光學成像偵察衛星、目標監測預警衛星等為代表的高性能衛星的迫切需求背景下,通過高質量的星光測量技術獲取精確的姿態位置、目標指向信息仍是國際上的研究熱點,將推動測量敏感器不斷向更高精度、高動態、多功能以及智能化的方向發展。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00