車載平視顯示器光學檢測技術研究
2020-09-10 12:29:21肖小敏
中國新技術新產品 2020年13期
肖小敏
摘 ?要:平視顯示器( Head-Up display,HUD)即虛像顯示器,既是一個顯示系統,也是一個成像系統,已被廣泛應用于各種中高端車型。隨著HUD的不斷發展,其檢測方法和手段也在不斷跟進,對HUD的測試不僅要對顯示器的亮度、色度、對比度、均勻度等光度學性能進行測量和評價,還要對成像系統的像距、畸變、MTF、重影和雙目視差等光學成像性能進行檢測。該文以機械手為基礎,以相機和亮度計為基本檢測設備,介紹一種較適用的HUD 光學檢測的方法。
關鍵詞:平視顯示器;光學測試;算法;汽車照明;三角測距;雙目視差
中圖分類號: ?U463.6 ? ? ? ? ? ? ? 文獻標志碼:A
0 引言
隨著國內汽車前擋技術的突破,平視顯示器也越來越多地被應用在汽車上。平視顯示器能夠對重要的行車信息進行實時顯示,在看到實際路況的同時,獲取HUD顯示的圖像信息,不需要讓視線偏離路況,降低了行車的潛在風險,同時避免頻繁變換視野,造成視覺疲勞,提高了駕駛的安全性。
1 HUD 光學系統分析
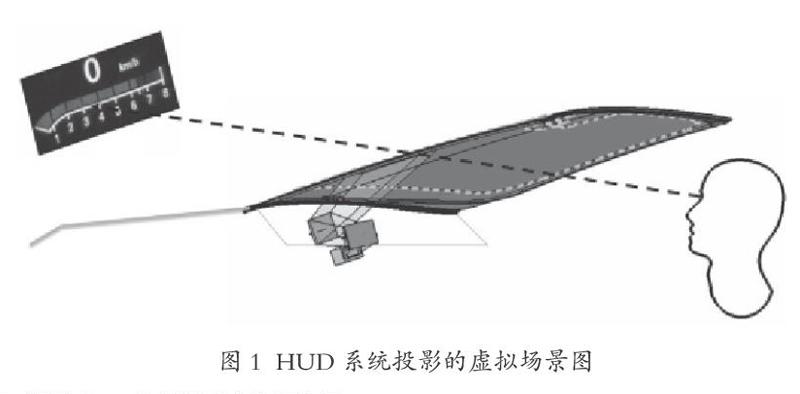
HUD 通過將像源(LCD、DLP 或者其他光電系統產生的圖像信息)通過成像系統(W-HUD/AR-HUD的前擋風玻璃或C-HUD)將圖像投影到人的眼前。前擋風玻璃和combiner等類似玻璃的材料,都具有透射和反射的光學性能。透射可以讓人眼透過玻璃看到外部的真實場景,反射可以讓人眼看到HUD系統投影的虛擬場景,如圖1所示。最終將呈現出虛實結合場景。虛擬場景中設計添加各種路況導航等標示信息,可以準確感知外界信息,減少對外界的誤判。
2 HUD 光學測試原理
相對于傳統的顯示器,HUD有明顯的不同,除了要檢測一般顯示器系統的亮度、色度、均勻度等參數,還需測試其下視角、FOV(圖像尺寸)、視差、像距(投影距離)、MTF (調制傳遞函數)、畸變,眼盒(Eyebox)和重影等光學成像參數。
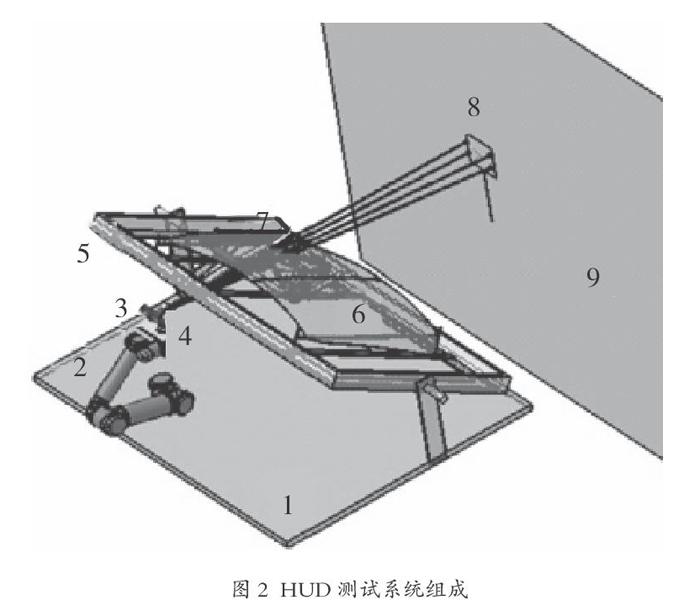
如圖2所示,該類測試設備一般是采用平臺化設計,兼容調試和檢測HUD系統的系列產品,由1-平臺、2-機械手、3-視覺相機、4-光度測量儀、5-玻璃支架、6-前擋玻璃、7-HUD光機、8-圖像校準板,9-環境光模擬器裝置和工業計算機等組成。機械手帶動視覺相機和光度測量儀運動,相機和照度儀進行數據采集并傳回電腦,再由計算機處理并輸出報告。
2.1 投影距離
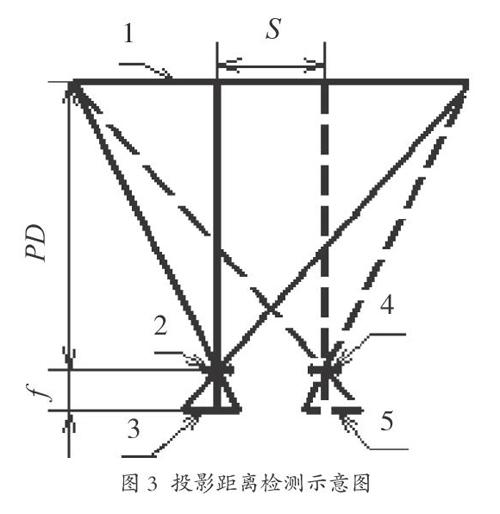
HUD的投影距離,用PD(Project Distance)表示。屬于對HUD光學系統的像距檢測。如圖3所示,相機鏡頭從位置2移動到位置3,鏡頭在位置2時物1成像于位置3, 鏡頭在位置4時物1成像于位置5。S為鏡頭從位置2移動到位置4的距離。
相機在鏡頭位置1的照片如圖4所示,主光軸的交點在Lo。
相機在鏡頭位置2的照片如圖5所示,主光軸的交點在Ro。
將圖4、圖5點陣對齊后,可以計算Lo點與Ro點在像素層面上偏差量(?p)和在尺寸層面上偏差量(?)。L代表像在尺寸層面上長度,Lp代表像在像素層面上長度,PD代表投影距離。由此推導出
(1)
相似三角形的性質可以推導出
(2)
綜合可知
(3)
在測量投影距離時,先標定一個投影距離PD1,采用固定的offset和Lp,從相機在鏡頭位置1/位置2的照片分析計算出相應的?P1。
再測量一個待定的投影距離PD2,采用固定的offset和Lp,從相機在鏡頭位置1/位置2的照片分析計算出相應的?P2。
對上式變形為
(4)
由此可以計算出待定的投影距離PD2。
2.2 虛像尺寸
HUD的視場, 用FOV(Vield of View) 表示。FOV-H表示橫向視場,FOV-V表示豎向視場。
HUD的下視角是在車身坐標系下,HUD的主光軸視場點與主光軸眼點的連線與車身水平平面的夾角,用LDA(Look down angle)表示。
圖像尺寸是主光軸眼點看到的虛擬圖像大小,其與投影距離成正比。分別用L和H表示圖像尺寸的長與寬。
(5)
(6)
2.3 MTF
光學傳遞函數(OTF)是一個可以比較客觀、全面地評價信息傳遞和轉換系統質量的工具,其由調制傳遞函數(MTF)和位相傳遞函數(PTF)組成[1]。位相傳遞函數(PTF)一般不影響像的清晰度,被關心的不多,實際用得多的是調制傳遞函數(MTF)。
調制傳遞函數(MTF:Modulation Transfer Function)的計算公式如公式(7)所示。
(7)
式中:表示空間頻率v時,像面的調制度, 表示空間頻率v時,物面的調制度。
調制度(modulation) 的計算公式如公式(8)所示。
(8)
式中:用M表示調制度, 和分別表示系統成像后圖像的最大和最小光強。
像的光強分布函數,等于物的光強分布函數和點擴散函數的卷積[2]。
(9)
式中:*表示卷積符號。
表示像的光強分布函數。
表示物的光強分布函數。
表示點擴散函數。
通過上面的公式可以計算出光學系統的MTF,實現對其光學性能的客觀評價。
HUD系統也是光學系統,MTF的評價方式同樣適用。通過若干個不同間隔、不同指向的檢測條紋在HUD系統的結果,對HUD系統進行客觀評價。每個檢測條紋要求明暗相間、寬度相等。在實際情境中,HUD利用橫向和縱向黑白矩形條紋的對比度,來測試所拍攝條紋的圖像。一般情況下是條紋間隔越小、清晰度越差,也就是圖像的調制度越差。HUD系統檢測在要求的線/對(P/L)的條紋圖成像后的調制度是否滿足要求。調制度越大、成像越清晰。
HUD要求的條紋間隔與HUD的投影距離和眼睛分辨率有關,見表1。
2.4 畸變和重影
畸變是指光學系統成像相對于物的失真程度。HUD系統畸變有些不同,主要分為動態畸變和靜態畸變2類。
靜態畸變是指人眼在眼盒中間位置看到的圖案與設計目標圖案的失真程度。
設計的目標圖案是希望投影出來的理想圖案。一般為柵格圖或點陣圖,如圖6所示。由于一般HUD系統產生的投影圖會產生畸變,所以在設計時,將采用Warping等一些反畸變的措施,使投影出來的圖案盡量與設計目標圖案一致。
在HUD檢測時,需要檢測中心眼點看到的圖像與設計目標圖案之間的一致性及偏差值。這時產生了靜態畸變,如圖7所示。左下角像點畸變水平偏差?X上下偏差?Y。
靜態畸變的計算方法
Max.Vertical Distortion =max(?Y)/H (10)
Max.Horizontal Distortion =max(?X)/L (11)
Max.Distortion=max(Max.Vertical Distortion, Max.Horizontal Distortion) (12)
式中:Max.Vertical Distortion表示最大豎向畸變,Max.Horizontal Distortion表示最大豎向畸變。Max.Distortion表示最大畸變。一般HUD接受3.5% 以下的靜態畸變。
動態畸變與靜態畸變的計算方法相似,前者是眼盒中間位置看到的圖案與設計目標圖案的失真(偏差),后者是眼盒其他位置看到的圖案與眼盒中間位置看到的圖案的偏差。
HUD重影是HUD系統特有的光學現象,HUD系統是通過前擋玻璃的反射產生圖像,而擋風玻璃的內外表面都會產生反射,將產生兩重圖像。一般普通前擋作HUD前擋時,2個圖像將相互錯位4 mm~6 mm,這就是HUD的重影,嚴重影響圖像的清晰度,目前汽車工業中采用楔形PVB粘合前擋的內外片玻璃, HUD前擋的內外表面形成一定的角度,使得2個圖像基本重合在一起,從而獲得清晰的HUD圖像。
重影的檢測方法,具體采用比較細的網格線投影普通前擋,測量出通過普通前擋內外表面反射圖像的網格線線粗。再用同樣的網格線投影HUD前擋,測量出內外表面反射圖像網格線錯動量。如果網格互相重合,就測量重合后網格線線粗加大變量。這里測量的網格線錯動量或網格線線粗加大變量就是HUD影像的重影值,重影值越小越好。HUD系統每個像點的重影值都不完全一樣。只有最大的重影值小于要求的重影值時,才能判斷HUD系統重影合格。
2.5 其他光學測試
檢測設備不僅要檢測虛像的成像質量,如成像距離、畸變和清晰度等[3]。還要檢測亮度、對比度、均勻性等。機械手上安裝光度測量儀,可以很方便地測量在Eyebox范圍內,各位置點眼睛看到的圖像光度學效果。良好的HUD圖像需要較高的對比度、足夠的亮度和無明顯差異的均勻性。現在的HUD一般都是彩色的,除了黑白2色外,還需對紅綠藍3色的亮度、對比度、均勻性等進行測試。
2.6 實際環境狀態下的模擬測試
HUD 在道路復雜環境下使用的效果,需要通過環境光模擬器進行模擬測試。
靜態測試中,需模擬夏日強光下和陰雨天或夜晚弱光環境中HUD圖像效果,在這種極限情況下,HUD圖像的對比度和與環境光的對比度要滿足一定的指標要求,可以獲得較好的視覺效果。
動態測試中,需模擬車輛在快速行駛時,外界環境亮度發生劇烈變化,如果HUD 顯示的亮度變化不匹配,駕駛員很難獲取HUD顯示的信息。這就需要通過試驗標定,使HUD圖像亮度變化與外界環境亮度相對應。
在使用LCD做成像單元時,如果駕駛員戴偏光太陽鏡,需要考慮LCD發出偏正光對其的影響。
3 結語
HUD發展日新月異,但是目前的檢測方法和手段還在不斷跟進,促進HUD行業整體健康發展,HUD與汽車安全性息息相關,其檢測也是不可或缺的。該文涉及的檢測方法已經部分應用到實際檢測中,對其理論原理進行分享,期望推動HUD行業的共同進步。
參考文獻
[1]胡家升.光學工程導論[M].大連:大連理工大學出版社,2005.
[2]張以謨. 應用光學[M].北京:電子工業出版社, 2008.
[3]沈春明,侯麗敏,許超,等.車載平視顯示器光學檢測技術的發展及趨勢[J].照明工程學報,2018,29(5):64-67,93.
