基于紅外測距傳感器的鐵路貨車車載電子稱重方法
2020-09-10 10:55:31張瑞國
內燃機與配件 2020年7期
張瑞國



摘要:為了減少鐵路貨車超載和欠載現象,更好提升鐵路貨運效益與駕駛安全性,并解決現有車輛稱重技術稱重地點受限問題,本論文對鐵路貨車車載電子稱重技術進行研究。提出了基于紅外測距傳感器車載電子稱重系統方案。該系統主要包括三個模塊:數據采集模塊、數據處理模塊和數據傳輸顯示模塊。實測結果表明本論文設計的基于紅外傳感器鐵路貨車車載電子稱重系統能夠實時測量鐵路貨車載重量并作出預警提示。
關鍵詞:鐵路貨車;車載電子稱重;紅外測距傳感器
0 ?引言
鐵路貨車超載會影響車輛部件的性能,并對鐵軌造成損壞,從而產生嚴重的安全事故。同時,欠載也會增加貨物的運輸成本。讓每列鐵路貨車在不超載情況下裝載更多的貨物,減少欠載與超載情況,有利于提高機車行駛的安全性,同時還能降低貨運成本和提高收益。因此,車輛稱重對鐵路貨車運營有著重要意義。
車輛稱重技術主要分為機械式稱重技術和機電式稱重技術兩大類。而機械式稱重技術主要原理是通過杠桿傳動裝置把被測車輛的質量和已知的質量進行比較,從而知曉被測機車車輛的重量。對于機電式稱重技術,其主要分為有基坑機電式車輛動態稱重技術和無基坑機電式車輛動態稱重技術。現代的無基坑機電式車輛動態稱重技術主要是以軌道稱重傳感器為核心,構成無基坑無稱臺車輛稱重系統,其主要缺點是待測量車輛貨物稱重時,必須把車輛運行到安裝了軌道稱重傳感器的指定位置,受測量地點限制。為了解決測量地點受限問題,達到實時稱重,本文提出了基于紅外測距傳感器的鐵路貨車車載電子稱重技術。
1 ?系統設計原理
1.1 系統設計要求
本系統針對轉K6型轉向架的貨車車輛,設計了車載電子稱重系統,實現如下功能:
①當車輛超載時,顯示車重和超載量,開啟超載警報;
②當車輛欠載時,顯示車重和欠載量;
③顯示車輛兩個轉向架上的四組彈簧受力情況,若超過其最大承受力,開啟警報。
1.2 轉K6型轉向架的彈簧減振裝置
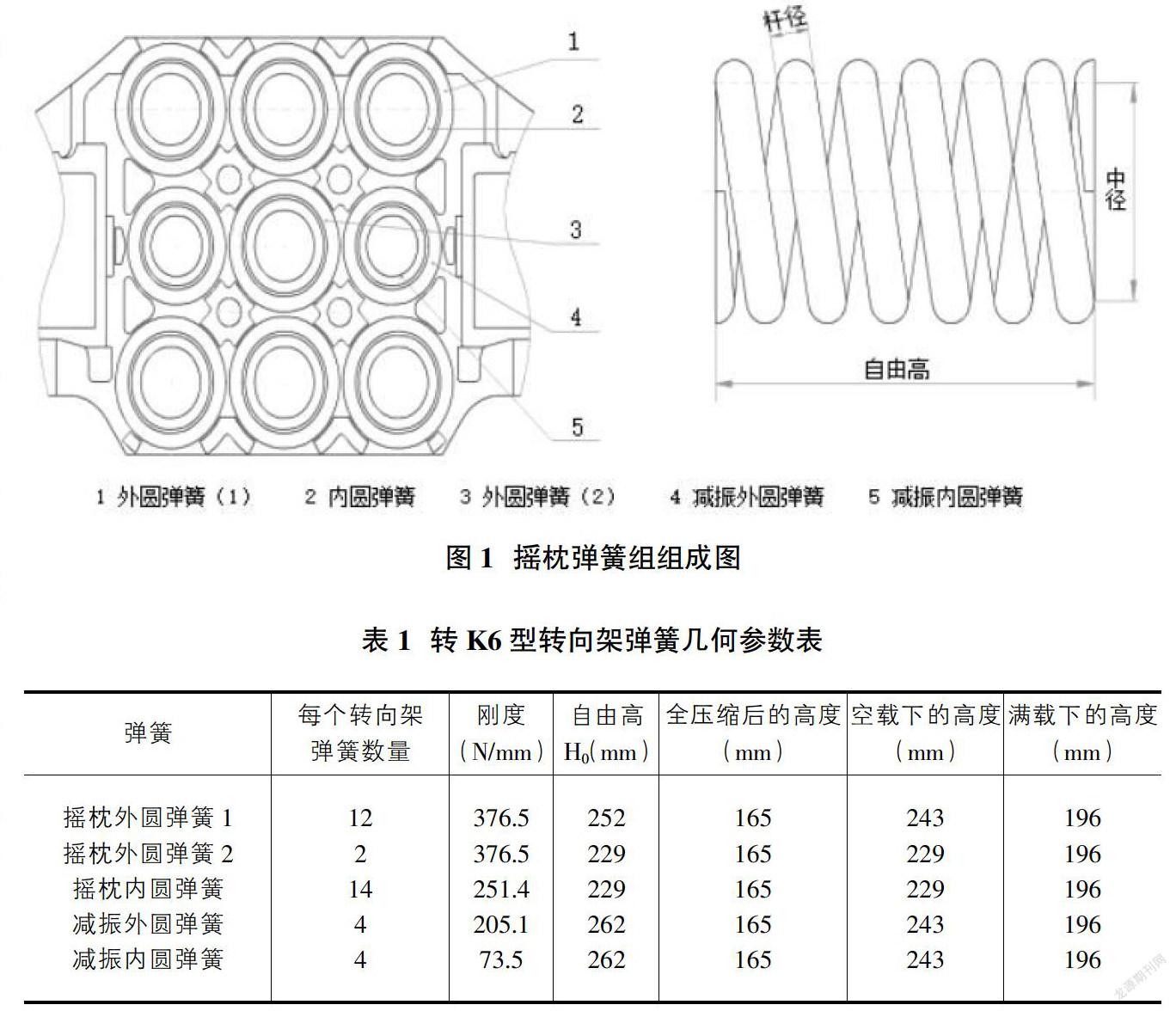
轉K6型轉向架的組成部分由軸箱、輪對、搖枕、側架、彈簧減振裝置和基礎制動裝置六部分組成。每節車輛有兩個轉K6型轉向架,每個轉向架左右兩側各有一個搖枕彈簧組,每個搖枕彈簧組由9組彈簧組成,具體如圖1所示。
在空載情況下,一節車輛的自重是20t,兩個轉K6型轉向架平均承重10t;在滿載情況下,兩個轉K6型轉向架平均承重50t。由于搖枕外圓彈簧1、搖枕外圓彈簧2、搖枕內圓彈簧、減振外圓彈簧和減振內圓彈簧這五種彈簧的自由高不相等,導致它們在不一樣的受力情況下各自被壓縮的距離也不一樣,因此計算時采用分段方法計算,得到了表1所示的參數。
1.3 系統設計原理
綜合分析轉K6型轉向架各組成部分的作用,得到了以下設計思路:當車輛靜止時,轉K6型轉向架的彈簧減振裝置所受到的壓力就是車輛重力和貨物重力之和。此時計算出彈簧減振裝置所受的壓力,就得到了車輛重力和貨物重力之和,加之車輛的重量是固定的且已知,則貨物的重力就等于彈簧減震裝置的受力減去車輛重力,得如下計算公式:
整個稱重系統將測試彈簧受力轉變為測試其壓縮長度,又因每個彈簧自由高是固定的,因此只需測量出其受力穩定后的長度,即可由其自由高減去壓縮后的長度,得到其被壓縮的長度量。最后根據公式(5)計算出車輛貨物的載重量。
2 ?系統設計
本文以STC89C52C單片機為主控制器,結合TLC2543模數轉換芯片和紅外測距傳感器GP2Y0A41SK0F搭建了鐵路貨車車載電子稱重系統電路。該稱重系統電路除了能夠完成稱重數據采集、數據處理和數據傳輸顯示外,還能進行超載警報和欠載提示。
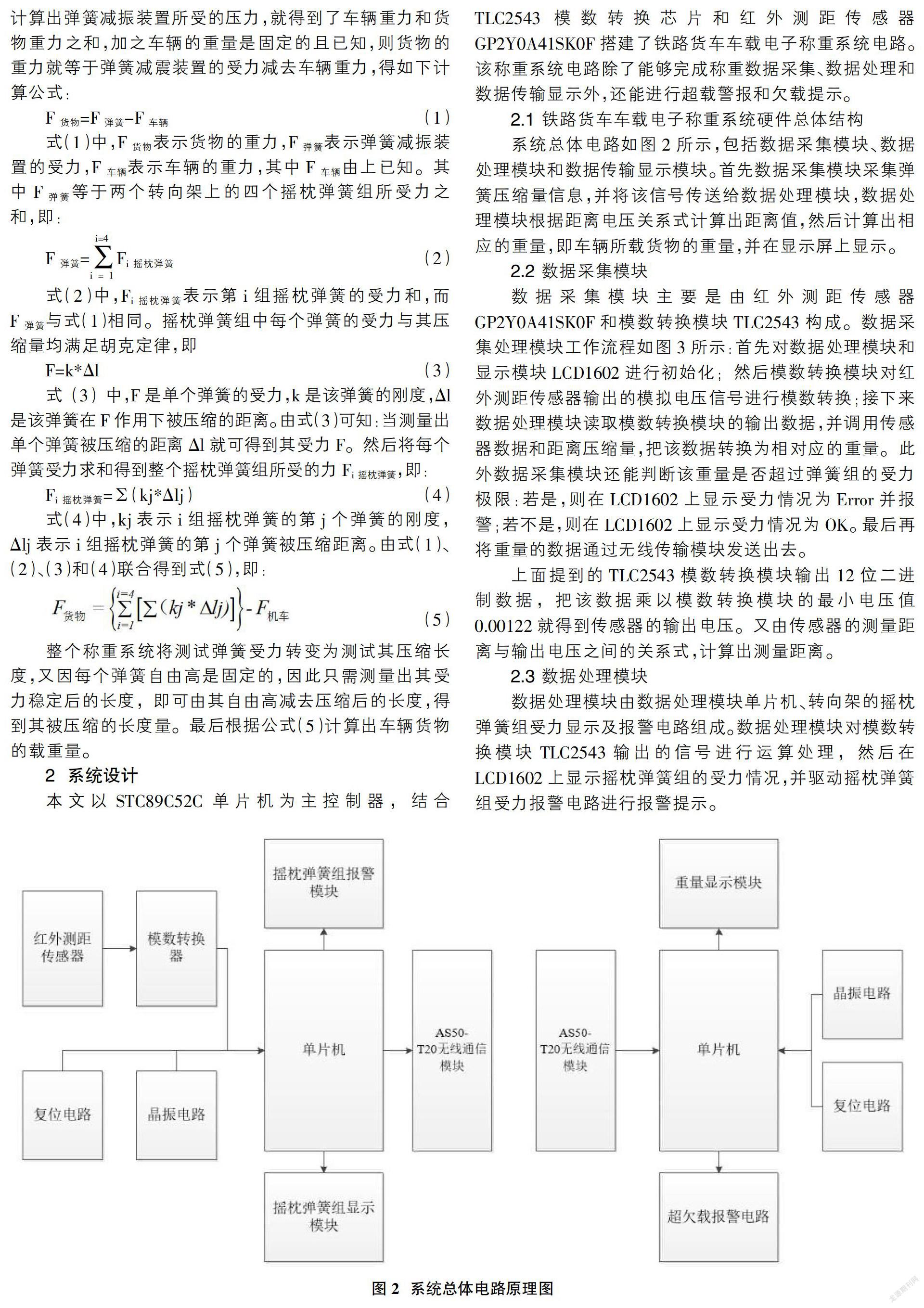
2.1 鐵路貨車車載電子稱重系統硬件總體結構
系統總體電路如圖2所示,包括數據采集模塊、數據處理模塊和數據傳輸顯示模塊。首先數據采集模塊采集彈簧壓縮量信息,并將該信號傳送給數據處理模塊,數據處理模塊根據距離電壓關系式計算出距離值,然后計算出相應的重量,即車輛所載貨物的重量,并在顯示屏上顯示。
2.2 數據采集模塊
數據采集模塊主要是由紅外測距傳感器GP2Y0A41SK0F和模數轉換模塊TLC2543構成。數據采集處理模塊工作流程如圖3所示:首先對數據處理模塊和顯示模塊LCD1602進行初始化;然后模數轉換模塊對紅外測距傳感器輸出的模擬電壓信號進行模數轉換;接下來數據處理模塊讀取模數轉換模塊的輸出數據,并調用傳感器數據和距離壓縮量,把該數據轉換為相對應的重量。此外數據采集模塊還能判斷該重量是否超過彈簧組的受力極限:若是,則在LCD1602上顯示受力情況為Error并報警;若不是,則在LCD1602上顯示受力情況為OK。最后再將重量的數據通過無線傳輸模塊發送出去。
上面提到的TLC2543模數轉換模塊輸出12位二進制數據,把該數據乘以模數轉換模塊的最小電壓值0.00122就得到傳感器的輸出電壓。又由傳感器的測量距離與輸出電壓之間的關系式,計算出測量距離。
2.3 數據處理模塊
數據處理模塊由數據處理模塊單片機、轉向架的搖枕彈簧組受力顯示及報警電路組成。數據處理模塊對模數轉換模塊TLC2543輸出的信號進行運算處理,然后在LCD1602上顯示搖枕彈簧組的受力情況,并驅動搖枕彈簧組受力報警電路進行報警提示。
搖枕彈簧組受力顯示及報警電路由連接排阻的LCD1602顯示屏電路和連接PNP三極管的蜂鳴器電路組成。當搖枕彈簧受力未超過自身極限時,LCD1602會顯示四組彈簧組是OK的,且蜂鳴器不會報警;當傳感器所測距離小于全壓縮長度165mm時,代表這組彈簧組已經超越極限了,具有危險性,此時LCD1602會顯示該組為Error,且蜂鳴器開始報警。
2.4 數據傳輸顯示模塊硬件電路
該模塊電路主要包括了數據無線傳輸模塊、重量顯示模塊電路和超欠載報警提示模塊。數據無線傳輸模塊采用AS50-T20無線傳輸模塊,通過無線傳輸模塊,從而將單片機所處理的數據傳到另外一個單片機上。重量顯示模塊主要功能是顯示車輛的貨物載重量和處于超載還是欠載。超欠載報警提示模塊和轉向架搖枕彈簧組受力報警電路相似。當貨物超載時,蜂鳴器報警;當貨物欠載時,蜂鳴器不報警。
數據接收顯示模塊工作流程如圖4所示:模塊上電啟動后,先對數據處理模塊單片機和顯示模塊LCD1602進行初始化;然后將接收的數據轉換為Double型數據并傳輸給單片機處理得到重量值,再判斷其是否超載。若超載,則在LCD1602上顯示超載重量并驅動超載警報;若欠載,則在LCD1602上顯示欠載重量。
3 ?系統仿真調試
本系統實時監測車輛所載貨物是否超載及欠載情況,并顯示該車輛2個轉向架上的四個搖枕彈簧組在承載貨物情況下各自的受力情況。
在欠載情況下:當傳感器測量的搖枕彈簧組壓縮后長度均為200mm時,重量顯示模塊顯示處于欠載情況,且貨物總重量為72.16t,該車輛還能增加7.84t的貨物。而搖枕彈簧組受力顯示模塊顯示該車輛兩個轉K6型轉向架上的四組搖枕彈簧的受力均未超過其極限,所以兩個報警電路均未報警,只有欠載指示燈被點亮。
在超載情況下:當傳感器測量的搖枕彈簧組壓縮后長度均為180mm時,重量顯示模塊顯示該系統此時處于超載情況,且貨物總重量為111.94t,該車輛超載了31.94t的貨物,而搖枕彈簧組受力顯示模塊顯示該車輛兩個轉K6型轉向架上的四組搖枕彈簧的受力均未超過其極限,所以搖枕彈簧組受力報警電路未報警,而超載報警模塊報警且超載指示燈被點亮。
當傳感器測量的搖枕彈簧組壓縮后長度均為140mm時,重量顯示模塊顯示搖枕彈簧組受力已超極限情況,此時貨物實際總重量是不知道的,而重量顯示模塊顯示的總重量為0。而搖枕彈簧組受力顯示模塊顯示該車輛兩個轉K6型轉向架上的四組搖枕彈簧的受力均超過其極限,所以搖枕彈簧組受力報警電路報警。
其仿真圖如圖5所示。
4 ?結論
本論文完成了基于紅外測距傳感器的鐵路貨車車載電子稱重系統的設計。包括系統整體架構設計,各個模塊硬件電路設計和軟件程序設計,并進行了系統仿真。此外還完成該系統PCB設計并制作電路,最后對該系統進行功能測試與調試。測試結果顯示,所設計制作的基于紅外傳感器鐵路貨車車載電子稱重系統能夠實時測量鐵路貨車載重量并作出預警提示,達到預期目標。
參考文獻:
[1]賀曙新.車輛動態稱重技術的歷史、現狀與展望[J].中外公路,2004(06):104-108.
[2]杜潤祥.國內外機車車輛稱重技術發展狀況與對策[J].鐵道車輛,1998(03):13-14.
[3]杜潤祥.世界機車車輛稱重技術的發展[J].中國鐵路,1997(09):49-50.
[4]杜潤祥,李介明,湯紹懷.G3W-1無秤臺動態電子軌道衡研制[J].鐵道學報,1993(04):110-114.
