基于MATLAB與AMESim的電液伺服系統PID控制器設計
2020-09-10 07:26:55于小慶
內燃機與配件 2020年20期
于小慶


摘要:電液伺服系統在制造業、工程機械、機器人等眾多領域均有應用,是目前液壓驅動高精度運動控制主要控制方式。在電液伺服系統設計時,為了能夠知曉系統的靜動態特性,可采用計算機仿真技術,進行電液伺服系統的建立,控制算法的計算。AMESim提供了一套電液伺服仿真建模與分析的解決方案,可與MATLAB進行連接,充分發揮MATLAB的算法運算能力。建立電液伺服系統傳遞函數模型,控制算法模型為電液伺服控制提供理論基礎,建立一種變幅機構的聯合仿真模型,采用PID控制方式,進行機構位置保持能力測試,結果表明建立的模型正確,達到了預期效果。
Abstract: The electro-hydraulic servo system is widely used in many fields, such as manufacturing industry, construction machinery, robot and so on. In the design of electro-hydraulic servo system, in order to know the static and dynamic characteristics of the system, computer simulation technology can be used to establish the electro-hydraulic servo system and calculate the control algorithm. AMESim provides a set of solution for modeling and analysis of electro-hydraulic servo simulation, which can be connected with MATLAB and give full play to the algorithm operation ability of MATLAB. The transfer function model of the electro-hydraulic servo system is established, and the control algorithm model provides the theoretical basis for the electro-hydraulic servo control. A joint simulation model of the luffing mechanism is established. The PID control method is used to test the position holding ability of the mechanism. The results show that the model is correct and achieves the expected effect.
關鍵詞:電液伺服系統;仿真技術;AMESim;MATLAB;PID控制
Key words: electro hydraulic servo system;simulation technology;AMESim;MATLAB;PID controler
中圖分類號:TH137.52;V249? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1674-957X(2020)20-0055-02
0? 引言
機電液系統應用廣泛,適合需要大力矩工作的場合,如多種機床、航天器械、工程機械等[1,2]。在對運動或動力精度要求較高的場合,往往需采用電液伺服控制系統[3],一般都包含了比較元件、放大器、轉換器、執行元件、負載、傳感器等組件。AMESim提供了較為豐富的電液伺服控制系統解決方案,可進行電液伺服的液壓系統建模。在控制算法方面,PID控制技術逐漸成熟,隨著計算技術的發展,數字PID控制器得到了更多應用。曹昌勇[4,5]等在汽車減振器性能檢測系統中,運用模糊PID控制算法,采用MATLAB進行程序的編制,結果表明系統工作平穩,達到了較好的控制效果。付甜甜[6]等根據MATLAB和AMESim各種的優勢,采用模糊PID控制器,完成了液壓系統模型的建立與控制器設計,對系統進行聯合仿真,結果表明模糊PID控制器在電液伺服控制方面具有更高的速度和精度。
1? 伺服系統與控制器軟件實現
1.1 伺服與控制算法模型
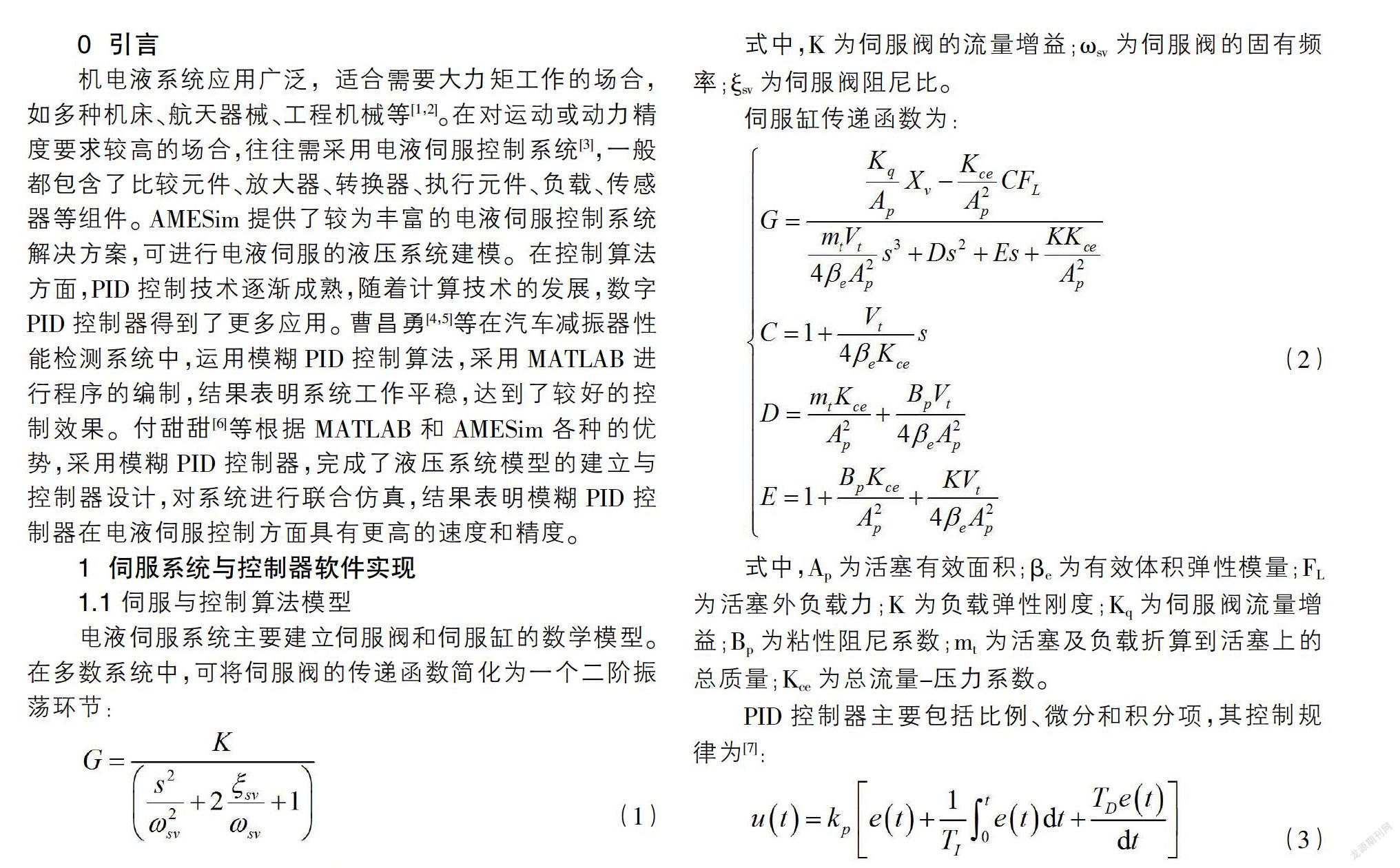
電液伺服系統主要建立伺服閥和伺服缸的數學模型。在多數系統中,可將伺服閥的傳遞函數簡化為一個二階振蕩環節:
式中,K為伺服閥的流量增益;?棕sv為伺服閥的固有頻率;?孜sv為伺服閥阻尼比。
伺服缸傳遞函數為:
式中,Ap為活塞有效面積;?茁e為有效體積彈性模量;FL為活塞外負載力;K為負載彈性剛度;Kq為伺服閥流量增益;Bp為粘性阻尼系數;mt為活塞及負載折算到活塞上的總質量;Kce為總流量-壓力系數。
PID控制器主要包括比例、微分和積分項,其控制規律為[7]:
式中,u為控制器的輸出;e信號偏差;kp為比例系數;TI為積分時間常數;TD為微分時間常數。
1.2 AMESim液壓系統仿真
AMESim主要包括流體系統、電氣系統、電機系統、熱系統、機械系統和信號系統,已在多個工業領域得到應用,通過圖形化界面調取元件。其中流體系統中包括了多種流體單元,包括流體設置單元、管道、過濾器、蓄能器、液壓缸、液壓泵、恒壓泵、液壓閥等。液壓缸包括單作用液壓缸、雙作用液壓缸、帶負載的單作用液壓缸、有彈簧輔助的單作用液壓缸等。液壓泵包括定量泵、變量泵等,可與液壓閥進行組合連接形成變量柱塞泵等。液壓閥模塊包括單向閥、兩位三通閥、三位四通閥、減壓閥、調速閥、梭閥、三位四通電液伺服閥等。
機械系統模塊包括機架、電動機齒輪等多種常見機械設備。其中的3D機械模型庫將平面機械結構轉為三維機械結構模型,可更加真實地模擬物理系統。信號系統模塊包括信號發生器、傳遞函數塊、函數塊、濾波器等。其中傳遞函數塊基于模型的傳遞函數;函數塊可設置一個函數模型;濾波器可設置為低通、高通或帶通濾波器等。AMESim用較少的要素完成復雜的系統模型,通過圖形界面實現對仿真模型的擴充以及改變,擺脫了復雜的數學建模,注重系統本身的物理模型。
1.3 MATLAB Simulink控制器設計
70年代中期,Cleve Moler博土及其同事開發了基于FORTRAN語言的LINPACK和EISPACK子程序庫,其名稱是由MATrix和LABoratory兩個單詞的前三個字母所合成。MATLAB經過了幾十年的發展,其形成了以高性能的數組運算能力,實現了眾多高效運行的函數,且提供了非常高效的編程語言與二次開發環境,已廣泛應用于科學研究、數值計算、系統建模與仿真等。MATLAB Simulink是窗口圖形方式的、專門用于連續或離散時間的系統建模仿真,同時提供了與AMESim聯合的接口。
在MATLAB Simulink環境下可建立電液伺服控制系統的控制算法運算模型,在Simulink中可調用與AMESim連接的接口,通過編譯AMESim中的MATLAB接口塊可生成接口文件,將接口文件導入Simulink的接口塊即可完成連接。
2? 變幅機構模型建立
如圖 1所示,某變幅機構的AMESim液壓系統模型,采用帶負載的單作用液壓缸模型,三位四通電液伺服閥模型,定量泵模型,采用一個唯一傳感器進行活塞桿位移的測量,測量輸出經過一個比例增益環節,通過設置比例系數實現不同單位量級之間的轉換。MATLAB接口的輸入為液壓缸活塞桿運動位移,輸出為經過PID控制算法運算后的輸出,輸出到伺服閥,從而控制伺服閥的動作。
設置活塞桿運動情況為從初始位置運動到55.5cm處,并保持該位置一段時間。從MATLAB啟動仿真運行,仿真結果如圖 2所示。由圖2可知,活塞桿從初始0cm位置逐漸過渡到期望的55.5cm位置,穩態階段之前有一小段的振蕩產生,但振蕩幅值較小,在穩態階段,系統的響應與期望信號幾乎重合,控制精度非常高,達到了預期的設計目的。
3? 結束語
本文針對電液伺服系統及其應用,介紹了能夠進行電液伺服系統仿真的AMESim軟件,以及能夠進行控制算法運算的MATLAB軟件。在AMESim中建立了某種變幅機構的液壓系統模型,通過接口技術與MATLAB進行連接,采用PID控制算法進行伺服缸運動控制,結果表明所設計的控制系統具有較高精度的跟蹤效果,到達了設計預期,可為相關系統設計與優化提供參考。
參考文獻:
[1]朱小晶,權龍,王新中,等.大型液壓挖掘機工作特性聯合仿真研究[J].農業機械學報,2011,42(04):27-32.
[2]劉鵬虎,張勇,張強.液壓挖掘機工作裝置的動力學分析及控制[J].中國工程機械學報,2007(01):72-74,112.
[3]呂安生.抓臂式清污機設計與關鍵技術研究[D].合肥工業大學,2019.
[4]曹昌勇,林華,王子權,等.汽車減振器性能檢測伺服模糊PID控制研究[J].佳木斯大學學報(自然科學版),2018,36(06): 917-920.
[5]曹昌勇,林華,王洪新,等.電液伺服滑模消抖控制差分優化研究及仿真[J].洛陽理工學院學報(自然科學版),2019,29(02): 30-34,41.
[6]付甜甜,朱玉川,顧亞軍.基于MATLAB-AMESim的電液伺服系統模糊PID控制[J].機床與液壓,2016,44(20):144-146,154.
[7]徐宇寶,林華,王子權.基于STM32智能溫控自調速風扇PID控制研究[J].齊齊哈爾大學學報(自然科學版),2018,34(05): 7-11,18.