智能探路小車的設計
2020-09-10 14:53:53高志強代云凱趙海茹楊超黨增杰王翠芬左楠楠
內燃機與配件 2020年2期
高志強 代云凱 趙海茹 楊超 黨增杰 王翠芬 左楠楠









摘要:智能探路小車是集環(huán)境條件收集、環(huán)境因素判斷、遠程控制,可實現實物采樣、環(huán)境分析、智能避障、科學勘探、惡劣環(huán)境工作等功能。在系統(tǒng)設計方面,以arduino為控制核心,以超聲波傳感器檢測前方障礙物,從而自動避障,我們研究的智能探路小車在原有的探路小車基礎進行改造,設計遠程操控、環(huán)境分析、采集集一體的智能探路小車模型,以達到對局部地形更深入的了解。隨著電子工業(yè)的發(fā)展,智能技術廣泛應用于各個領域,也越來越受到人們的喜愛。
關鍵詞:arduino;智能探路小車;實物采樣;自動避障
1? 概述
21世紀以來,電機一體化在現代工業(yè)技術發(fā)展中越來越重要。智能化也成為了社會發(fā)展潮流,也可以說是以后的發(fā)展方向,各種智能設備參差不齊,表現出了智能化、集成化、小型化、追求的是高精度、高效率、低成本。如今,計算機、信息、數據庫、圖形可視化等技術的發(fā)展,我們已經擁有海量的地質地形的知識,但這只能對該地形大概的理解,局部勘測仍然存在很大的隱患。局部勘測包括智能和人工探測,而人工勘測不僅進度緩慢,而且存在極大的危險。我們研究的智能探路小車在原有的探路小車基礎進行改造,設計遠程操控、環(huán)境分析、采集等功能集一體的智能探路小車模型,以達到對局部地形更深入的了解。
1.1 課題背景
自第一臺工業(yè)機器人誕生以來,機器人的發(fā)展已經遍及機械、電子、冶金、交通、字航、國防等領域。近年來機器人的智能水平不斷提高,并且迅速地改變著人們的生活方式。人們在不斷探討、改造、認識自然的過程中,制造能替代人工作的機器一直是人類的夢想。
智能小車設計與開發(fā)涉及控制、模式識別、傳感技術、汽午電子、電氣、計算機、機械等多個學科。它可以分為三大部分:傳感器檢測部分,執(zhí)行部分,CPU。
現智能小車發(fā)展很快,從智能玩具到各行業(yè)都有實質成果,其基本可實現循跡、避障、檢測貼片,尋光入庫、避崖等基本功能,有向聲控系統(tǒng)發(fā)展的趨勢。
1.2 主要內容
智能探路小車的結構如圖1所示。該系統(tǒng)以arduino為核心,以紅外線傳感器、距離傳感器和攝像頭作為輸入。紅外線傳感用于小車尋跡,距離傳感器收集周圍環(huán)境的距離信息使小車保持一定距離用于避撞和防撞,攝像頭用于收集周圍的環(huán)境信息并傳輸實時情況;電機驅動1用于驅動小車前進后退轉彎提供足夠的動力。另外,遠程控制端能夠通過arduino協(xié)調各輸入輸出工作。
1.3 研究意義
智能小車是現代工業(yè)技術發(fā)展的產物,作用范圍較廣,可根據不同的環(huán)境,不同要求搭載不同處理模塊,實現代替人工操作,應對危機時刻,并且隨著軍事技術逐漸走向信息化,智能化的發(fā)展,智能小車在軍事領域逐漸顯現出了重要的應用價值,在物流方面,智能小車代替了人工勞動力,提高了工作效率。智能設備之間的實時通信,任務執(zhí)行,可以降低勞動強度,提高工人勞動生產率,節(jié)能降耗。同時該項目研究的智能探路小車能在未知且危險系數高的環(huán)境下工作,如地形復雜、容易坍塌,高溫高濕、空氣質量差等極限環(huán)境,能代替人工做環(huán)境和地質分析、樣品采集等工作并能有效的探測危險,提前對危險做好防范,減少施工時的危險系數。
2? 智能小車的主體模塊
2.1 舵機結構及工作原理
2.1.1 舵機結構
舵機的外觀結構和內部結構如圖2所示,其內部結構主要是由直流電動機、減速此輪組、傳感器和控制電路組。
2.1.2 工作原理
當控制信號通過信號線傳給控制電路板,控制板驅動直流電機轉動,接著直流電動機帶動與電機相連的此輪組,最后減速傳動給外面的舵盤。舵機的輸出軸和位置反饋電位計是相連的,舵盤轉動的同時,帶動位置反饋電位計,電位計將輸出一個電壓信號到控制電路板,進行反饋,然后控制電路板根據所在位置決定電機轉動的方向和速度,從而達到目標停止。
舵機的控制信號是PWM信號,是依據占空比的變化的大小來控制舵機轉動角度的大小,從而確定停止的位置或者方向。
對于轉動角度為180度的舵機來說,舵機輸出轉角與輸出脈沖關系如表1所示。其表現出的是一種線性變化。每個廠家生產的舵機外觀各式各樣的,但其舵機的基本結構和原理都是相似的,外接有三根線,這三根線分別表示地線(GND)、正極線(VS)和信號線(S),其對應的顏色分別是黑色、紅色和橙黃色。其使用的電壓源也不一樣,對于舵機的轉矩和輸出的力矩同樣也是各不相同的對使用的電壓值不一樣,使得輸出的力矩也就不一樣,當然具體看應用條件。舵機線頭如圖3所示。
2.2 GT-38通訊模塊性能分析
2.2.1 GT-38通訊模塊概述及特點
①概述。
GT-38無線串口通信模塊是新一代的多通道嵌入式無線數傳模塊。無線工作頻段為433-458.5MHz,可設置多個頻道,步進是100kHz,總共設有255個頻道。模塊最大發(fā)射功率為 100mW(20dBm),5000bps 空中波特率下接收靈敏度-116dBm,開闊地可達到1200 米的通信距離。
②特點。
遠距離無線傳輸;工作頻率范圍在433-458.5MHz,多達255個通信頻道;體積較小,價格便宜;內置 MCU,可以通過串口和外部設備進行通信;一次發(fā)送的字節(jié)個數長達256字節(jié);模塊支持多種方式連接透傳。
③基本參數。
GT-38基本參數如表2所示。
2.2.2 GT-38引腳說明
GT-38的引腳說明及實物圖如表3所示。
2.3 GT-U7 GPS模塊性能分析
2.3.1 GT-U7 GPS模塊引腳說明
GT-38的引腳說明如表4所示。
連接圖和實物圖圖4所示。
模塊 PPS腳接了紅色 LED燈。
常亮:正常工作,但未定位;閃爍:定位成功。
2.3.2 GT-U7 GPS模塊GPS數據解析
樣例數據:$GPRMC,161229.48,A,3723.24757,N,12158.34167,W,0.13,309.62,120598,,*10
樣例數據分析如表5所示。
2.4 BT-06藍牙模塊性能分析
2.4.1 BT-06藍牙模塊的特點
本模塊支持UART接口,并支持SPP藍牙串口協(xié)議,具有成本低、體積小、功耗低、收發(fā)靈敏性高等優(yōu)點,只需配備少許的外圍元件就能實現其強大功能。
2.4.2 BT-06藍牙模塊引腳及分壓電路設計
BT-06藍牙模塊引腳及分壓電路設計如表6、圖5所示。
如圖5所示VCC接電源(3.3V-6V),GND接地端,TX接Arduino nano的RX,兩者之間可以互相通訊和傳輸數據,并且無丟失(也叫透明傳輸)。
3? 智能小車的創(chuàng)新模塊
3.1 智能避障
智能避障模塊主要利用arduino的定時、計數器。超聲波在空氣中的傳播速度為340m/s,根據計時器記錄的時間t,就可以計算出發(fā)射點距障礙物的距離s,即s=340×t/2,在測距計數電路設計中,采用了相關計數法,其主要原理是:測量時arduino系統(tǒng)先給發(fā)射電路提供脈沖信號,arduino計數器處于等待狀態(tài),不計數;當信號發(fā)射一段時間后,由arduino發(fā)出信號使系統(tǒng)關閉發(fā)射信號,計數器開始計數,實現起始時的同步;當接收信號的最后一個脈沖到來后,計數器停止計數。小車檢測前方是否有障礙物,如果沒有繼續(xù)前進,有障礙物看是否達到避障條件。需要轉彎避障時,先讓小車停下檢測左右兩邊的距離,哪邊距離小就轉向哪邊。
3.2 中長距離控制
以GPRS網絡連接小車與控制端,發(fā)送小車所處狀態(tài)情況的傳感器數據,借助手機、計算機進行人工指令終端控制。小車感應模塊的數據通過網絡傳到人工控制中心,通過實時記錄進行數據保存,在發(fā)現障礙物無法清除、小車無法工作時發(fā)出警報,由人工處理。
4? 智能小車的大腦
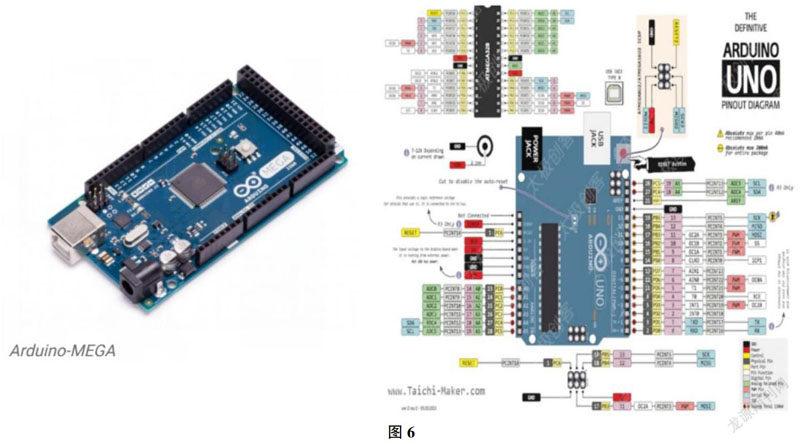
Arduino平臺特點:
①在應用方面,該通過與不同傳感器連接和通信,可以讓傳感器在環(huán)境中進行相關數據的采集和相關數據的監(jiān)測,人們可以更好的進行數據的分析,做出相應的對策;同時,它還可以連接許多無線傳輸模塊(如藍牙,攝像頭,WiFi等)。
②該平臺中的原始碼、電路圖、程序開發(fā)界面,都可以供人們免費的使用的下載,也可以根據自己的要求修改;當然,如果覺得官方的電路圖太復雜或者是在自己的設計中有些功能是不需要的話,自己可以將其進行簡化和更改,設計出自己需要的微處理器。(圖6)
③對于初學者來說也是很容易的,使用各種各樣的電子元件進行簡單的連接就可以完成相應的設計。另外,程序的編寫沒有C語言復雜;支持不同類型的互動程序,該控制板相對其他的控制板要便宜,自身的結構簡單不復雜,功能強大;可提供9VDC電源輸入以及多樣化的Arduino擴展模塊。
參考文獻:
[1]王川偉.煤礦救援探路小車虛擬樣機設計[D].西安:西安科技大學,2012.
[2]李永華,高英,陳青云.Arduino軟硬件協(xié)同設計實戰(zhàn)指南[M].北京:清華大學出版社,2015.
[3]李永華,王思野,高英.Arduino實戰(zhàn)指南[M].北京:清華大學出版社,2016年10月.