基于高頻電壓信號注入與改進卡爾曼濾波的永磁同步電動機控制系統設計
2020-09-10 07:22:44徐大利
內燃機與配件 2020年18期
徐大利

摘要:以永磁同步電動機(PMSM)為研究對象,基于脈振高頻電壓信號注入技術和改進卡爾曼濾波技術,本文提出了一種新的PMSM無傳感器控制系統。具體方法是,注入將脈振高頻電壓信號注入同步旋轉坐標系的d軸,從高頻載波電流中通過空間凸極跟蹤技術提取轉子位置估計誤差信號,轉速和位置估計信息通過改進卡爾曼濾波器處理得到。仿真實驗結果表明,這種方法可以實現PMSM的調速控制。
關鍵詞:PMSM;高頻電壓信號;改進卡爾曼濾波
0? 引言
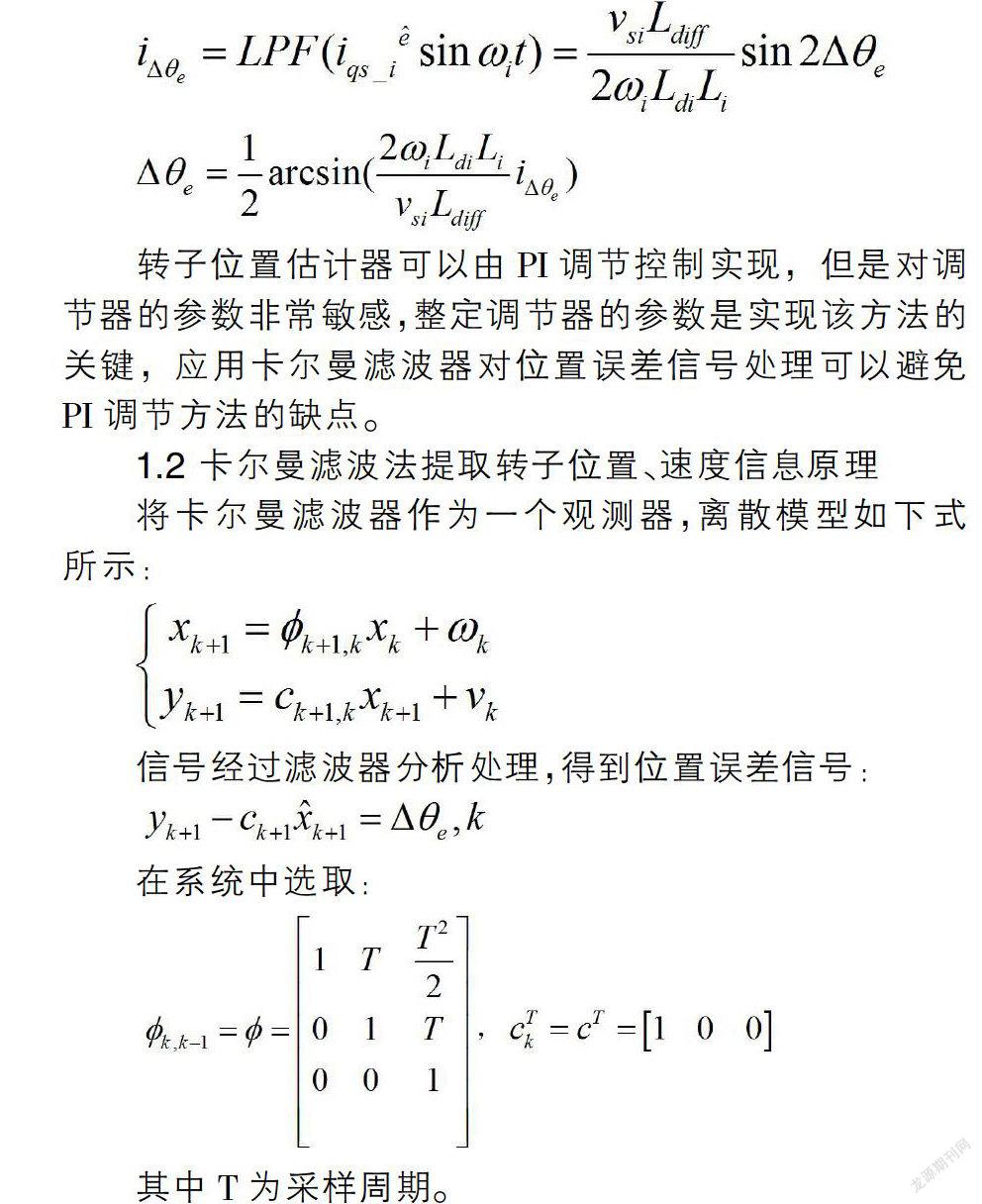
PMSM無傳感器控制技術逐漸稱為研究熱點。高頻電壓注入法[1-2]利用電機凸極性對高頻電流波形的影響來分析得出轉子的位置信號,從而估算出轉子的位置。轉子位置估計器通常由PI調節控制實現,對調節器的參數非常敏感,整定調節器的參數是實現該方法應用的關鍵[3]。應用卡爾曼濾波器對位置誤差信號處理可以避免PI調節方法的缺點且可以獲得良好的靜、動態性能。
1? 基于脈振高頻電壓信號注入與卡爾曼濾波的PMSM無傳感器控制系統
1.1 脈振高頻電壓信號注入法原理
在估計的同步旋轉坐標系的軸上注入高頻正弦電壓信號。
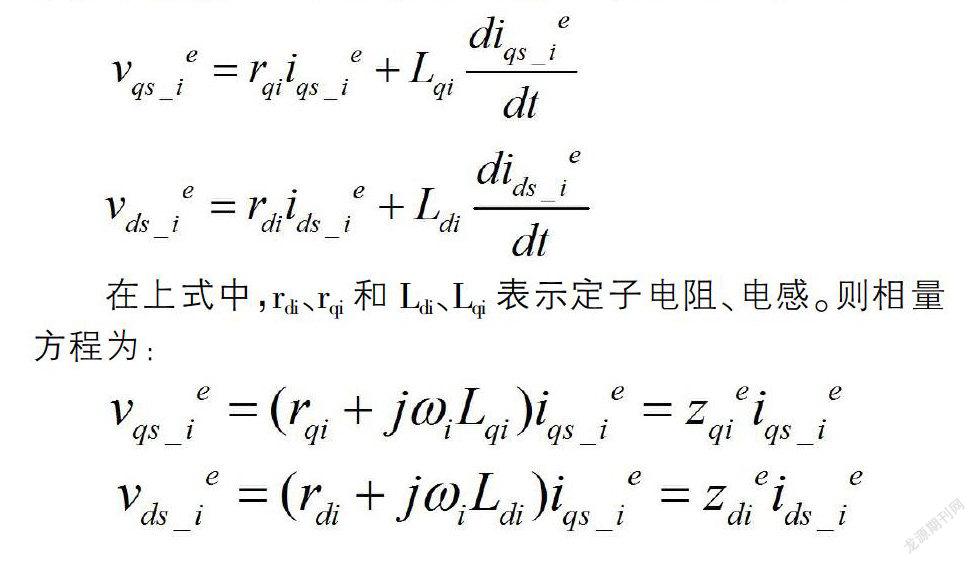
當注入的電壓信號頻率遠遠大于電動機的轉動角頻率,PMSM就是一個的R-L電路模型,則電壓方程為:
2? 系統實驗結果及分析
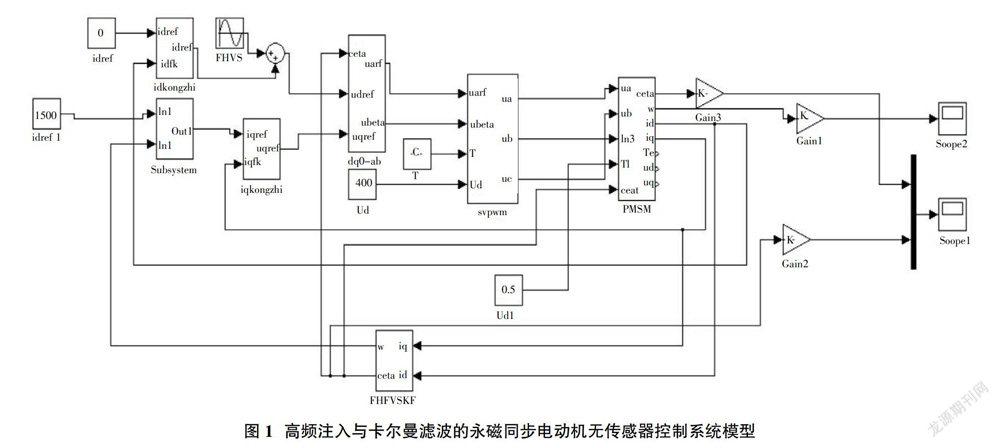
基于對原理的分析,Matlab建立仿真模型如圖1所示。電機仿真實驗控制方案采用id=0的速度、電流雙閉環矢量控制。
電機參數為:定子電阻RS=0.618?贅,直軸電感Ld=0.007418H,交軸電感Lq=0.012285H,轉子磁鏈?鬃f=0.1128Wb,轉動慣量J=5.59×10-4kg·m2,極對數Pn=2。仿真實驗如下所示:
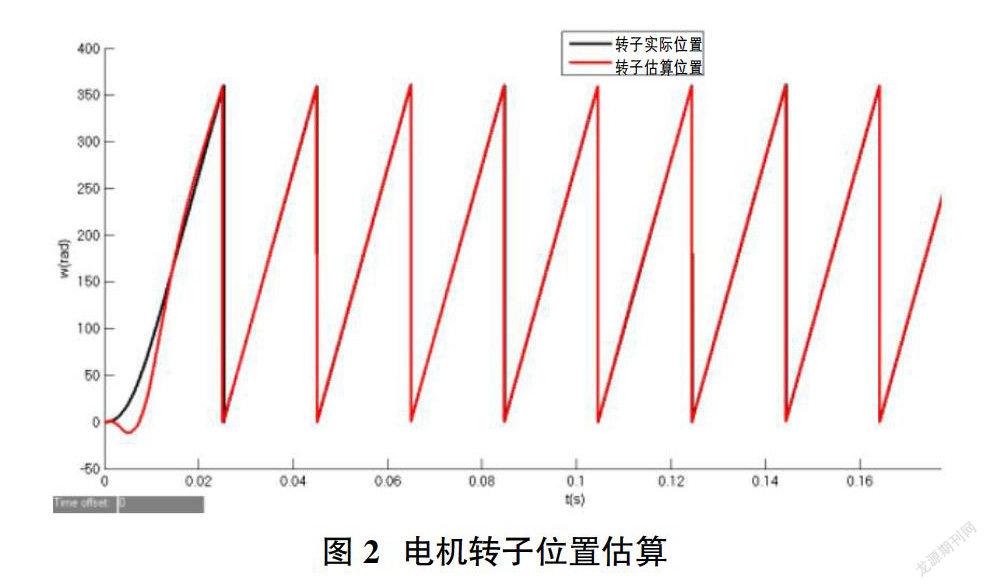
實驗給定初始速度為n=200r/min,0.05s速度升至400r/min。(圖2)
電動機啟動階段,轉子位置估算誤差較大,但是經過一個周期后,轉子估算位置幾乎與轉子實際位置一致,可見,這種算法可以較好的估算轉子位置,電動機起始估算速度和速度突變時的估算速度有誤差,單隨著系統自動調節,估算速度曲線幾乎與真實速度曲線重合,說明速度這種算法可以很好的實現速度估算。
實驗結果表明,電機啟動階段,轉子位置和速度估計有較大偏差,但最終系統可以達到穩定運行。
3? 結語
基于脈振高頻電壓信號注入技術和改進卡爾曼濾波技術,本文提出了一種新的PMSM無傳感器控制系統。經過理論分析和仿真實驗驗證,該方法不依賴電機參數,可實現對電機轉子位置和速度的估計,具有良好的性能。
參考文獻:
[1]Jang Ji-Hoon, Sul Seung-Ki. Sensorless Drive of SMPM Motor by High Frequency Signal Injection [J]. IEEE Trans. on Ind. Appl, 2012 39(4): 1031-1038.
[2]Ha Ji, Sul SK, Park M H. Position Controlled Interior Permanent Magnet Motor Without any Rotational Transducer [C] Proc of IEEE 2K, 2013: 396-399.
[3]Wang Limei, Guo Qingding, Lorenz R D. Sensorless Control of? Permanent Magnet Synchronous Motor[C] Proceedings of Power Electronics and Motion Control Conference. 2013: 186-190.
[4]李長明,王傳奎,魏利勝.基于卡爾曼濾波的永磁同步電機轉子位置估算方法研究[J].綏化學院學報,2019.