基于視覺隨動技術的工業機器人應用研究
2020-09-10 20:23:46李野
內燃機與配件 2020年18期
李野

摘要:通過應用機器視覺技術在抓取效率與識別精度方面的優勢,同時結合隨動跟蹤技術完成在線實時跟蹤,本文結合視覺技術與隨動跟蹤技術并應用SCARA機器人,實現物體的自動識別、運動抓取、準確裝箱,對研究機器人在運動控制領域具有重要意義,同時也為機器人其他應用方向提供一種有效的解決方案。
關鍵詞:工業機器人;視覺;跟隨運動
0? 引言
隨著現代技術的發展,在分揀裝箱領域對效率的要求、靈活性的要求也越來越高,以往的分揀裝箱系統采用物料停止-對中的模式,這種模式大大的增加了系統的響應時間,降低了生產效率,同時設備的頻繁啟停、反復運動對使用壽命有較大影響。如何實現自動識別-跟隨抓取對分揀裝箱系統具有重要的意義,本文結合視覺定位技術、隨動跟蹤技術,并應用SCARA機器人系統實現一套完整的分揀-裝箱系統,為機器人在行業中的應用提供有效的解決辦法。
1? 機器視覺技術
機器視覺技術通過視覺攝像機對物體進行拍照處理,獲取物體圖像信息,模擬人眼視覺的功能,通過視覺傳感、圖像采集、圖像處理等多個環節[1,2],可以實現對物體的自動定位、識別、分類、比對,最終將處理的數據結果下發給執行運動機構,實現相應目標物體的抓取、擺放等動作。機器視覺技術通過預先設定的圖像模板,進行圖像的匹配,通過圖像匹配實現物體的識別,同時在結合系統的標定參數進行視覺系統的計算,工作原理如圖1所示,最終計算出位姿偏差。
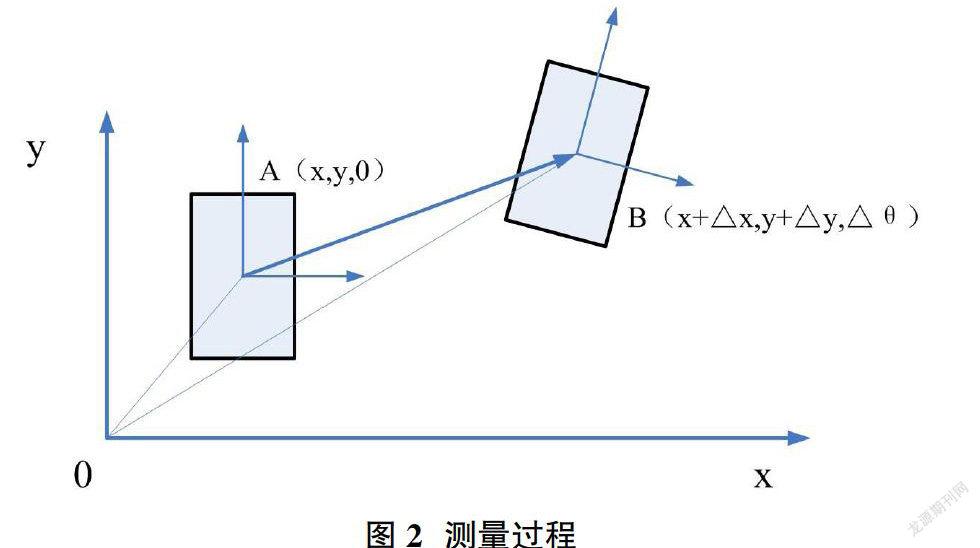
在2D視覺應用中,如圖2所示,標定物體坐標參數點A,并通過上述圖像匹配方法,獲取圖像位姿信息,計算出圖像位姿點B,通過點A與點B在基礎坐標系中的差值,最終可以計算出目標物體偏差值△x,△y,△θ,即平面物體的三個位姿偏差數據,將偏差發送給執行運動機構實現目標物體的搬運抓取。通過機器視覺能夠采集制造過程中的多個圖像[3]并通過各系統中的坐標系變換,得到目標物體的位姿信息,可使執行運動機構抓取目標物體的準確度得到很大程度的提高。
2? 隨動跟蹤技術
執行運動機構能夠按照預定的速度,在一定范圍內能夠與已知的理想軌跡相一致[4,5],并以相同的速度與運動物體共同運動,從而實現軌跡路徑的跟蹤過程,通過軌跡的跟蹤,能夠完成目標物體的動態抓取過程,動態的抓取過程能夠很大程度上提升抓取的效率,同時隨動控制方式與機器人相結合,能夠更大限度的提升機器人的應用空間及場景。
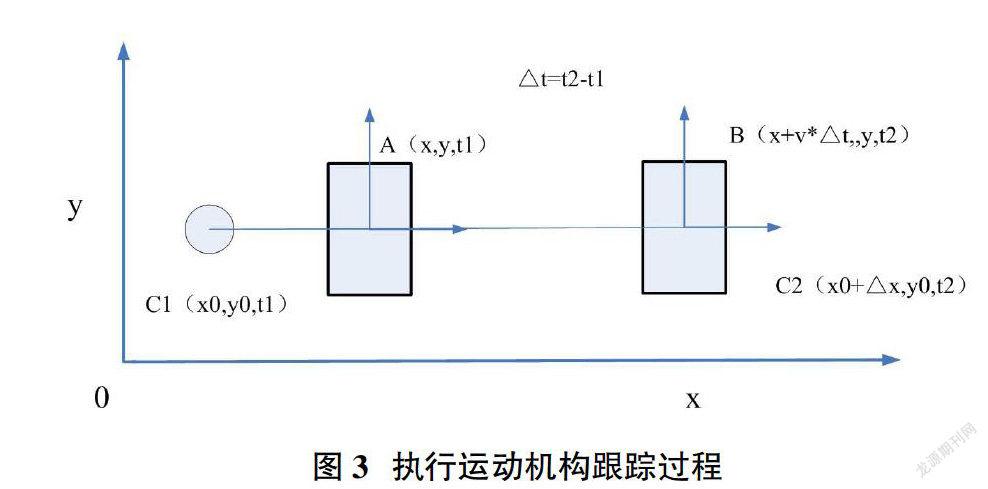
執行運動機構起點為C1,在t1時刻,目標物體的起點位置為A,在△t時間內,目標物體到達B點,同時執行運動機構在B點位置與目標物體速度相同,從而實現在△t時間內跟蹤到目標物體的目的,如圖3所示在此運動過程中目標物體是以恒定的速度v運行。在實際應用過程中,由于執行運動機構的結構、行程等因素限制,在△t時間內,執行運動機構運行的距離不能超出其運行最大行程范圍,一旦超出執行運動機構將無法在有效的時間內跟蹤到目標物體。
3? 結合視覺、隨動跟蹤技術的應用
通過視覺系統對輸送的目標物體進行拍照,確定目標物體的位姿,并以SCARA機器人作為目標物體搬運執行機構,實現目標物體的自動識別與定位,同時通過隨動跟蹤技術,進行實時的跟隨運動,從而實現目標物體的動態抓取過程,保證了目標物體的連續運行,從而提高了系統的生產效率。系統布置如圖4所示,其中實線部分為視覺拍照區域,在該區域內均可實現目標物體的視覺定位,點劃線區域為跟隨抓取區域,在該區域內能夠實現目標物體的跟隨運動及抓取動作,目標物體以四個為一組放置到指定料盒中,圖4中圓形標記位置為目標物體的放置料盒,同樣料盒定位方式任然以視覺拍照方式進行精確定位,確定放置位置的準確性。
在本系統中,設定視覺系統的拍照視場為800*800mm,物體在此區域內均可實現目標物體位置信息的確定,由于視覺系統受到環境光照影響比較大,為保證在視覺拍照時能夠具有一個良好的環境光照條件,將視覺相機的拍照區域設定成封閉區域并加以遮光防護,保證系統能夠在一個穩定的環境光照下,確保目標物體圖像采集的穩定性。另外,由于SCRAR機器人的運動范圍限制,在機器人工作的有效區域內,均可以實現目標物體的跟蹤抓取,一旦SCARA機器人的跟隨位姿點超出其運動范圍,機器人系統將自動漏過該物體,以便后續物體的抓取。在SCARA機器人系統中,通過設計機器人的跟隨距離、跟隨速度等參數,實現SCARA機器人參數的匹配,最終實現目標物體的跟隨運動,完成物體的運動跟蹤抓取過程。
為保證物體輸送的穩定性及可靠性,以伺服電機作為驅動裝置,采用同步帶傳動方式,減少帶傳動打滑現象,從而提高物體輸送精度,保證了目標物體輸送的穩定與可靠,并且與實際應用相結合,配置穩定運行線速度,有利于提高抓取的準確性與跟隨運動的可靠性,從而提高了系統的穩定性。
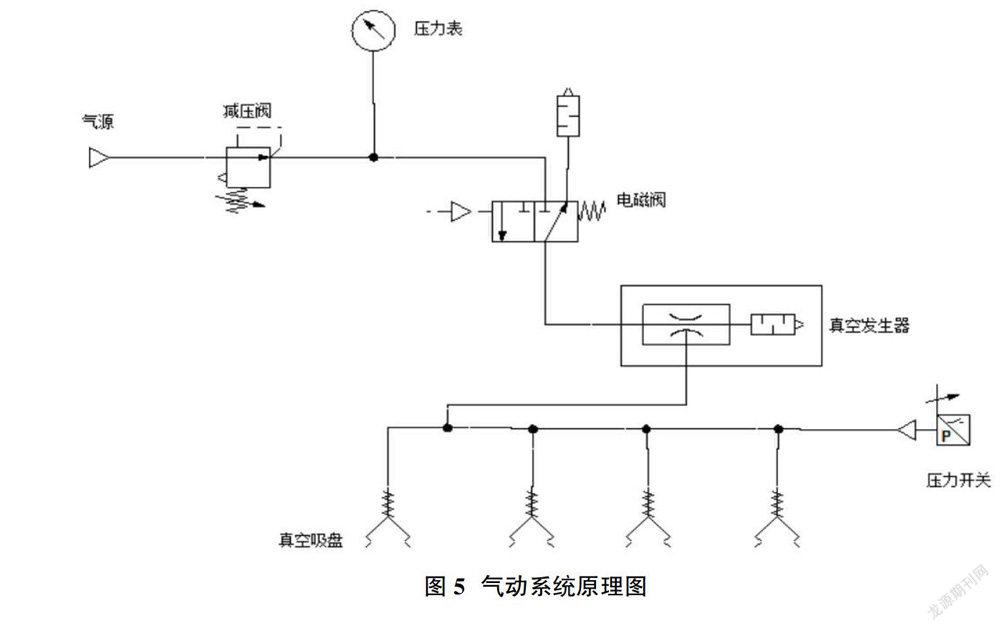
根據搬運目標物體的材質、重量、形狀等信息,采用真空吸附的方式實現目標物體的快速抓取搬運,為了實現快速的響應過程,采用快速響應電磁閥及大流量真空發生器,同時配備有真空壓力反饋,確保系統的穩定可靠,控制原理如圖5所示。
利用SCARA機器人的快速響應,使得該生產線的生產節拍能夠達到3.5s每件,可在有效的時間內對來料進行分揀搬運,同時保證了系統的連續運轉,避免輸送系統重復啟停,大大提高了生產線的效率。同時,該系統的建立解決了生產工位單調、重復的勞動模式,生產線實現用工減少每班3人次,每天6人次的用工,極大的提高了經濟效益。
4? 結束語
通過對視覺系統、隨動跟蹤系統的闡述,并應用兩種技術在機器人快速識別分揀系統中的應用,為無序分揀、動態分揀提供了一個良好的應用案例,為其技術在相關行業中的推廣及應用起到示范作用,為機器人在更多領域的應用提供了一個良好的解決方案。
參考文獻:
[1]張辰,等.視覺引導技術在SCARA機器人裝配任務中的應用[J].傳感器與微系統術,2019,38(2):157-160.
[2]盛華軍,等.視覺圖像技術與機器人工件抓取的協作應用[J].自動化與儀表,2020,35(2):37-46.
[3]楊旗,陳杰,崔玉博,等.基于視覺引導的ABB機器人定位與抓取[J].機械工程與自動化,2019(5):57-59.
[4]張日紅,等.基于運動跟蹤的工業機器人隨動控制[J].現代農業裝備,2018,5:63-66.
[5]江海天,等.工業機器人隨動跟蹤控制系統的設計[J].科技創新,2019,10:11.