天象一號衛星自主實時定軌方法與評估
2020-09-11 07:38:44伍蔡倫孫騰達
無線電通信技術 2020年5期
關鍵詞:卡爾曼濾波
伍蔡倫,孫騰達,謝 松
(1.中國電子科技集團公司第五十四研究所,河北 石家莊 050081;2.衛星導航系統與裝備技術國家重點實驗室,河北 石家莊 050081)
0 引言
低軌衛星速度快、幾何構型變化迅速,因此通過它播發導航修正誤差將大大縮短無需地面站支持的精密定位收斂時間[2]。低軌導航增強是以北斗衛星導航為基礎,通過接收北斗衛星信號實現時空基準框架的快速實時確定,同時播發包含北斗精密軌道和鐘差等信息的導航增強信號實現天基監測、全球完好性增強以及全球精密定位服務的導航增強系統,是對北斗導航系統的補充、備份和增強。除了導航增強以外,低軌衛星還具有通信時延短、落地信號功率強等優點,有助于進一步提高通信時效性和抗干擾能力。美國SpaceX公司已經提出了12 000顆衛星的低軌通信星座計劃來解決通信的全球覆蓋問題。綜上,基于通信和導航的一體化發展已經成為大勢所趨。為了加快天地一體化信息網絡重大項目進程,中國電科啟動并發射了“天象一號”A/B雙星用于移動通信和導航增強等關鍵技術的驗證。
在低軌導航增強的實施框架中,低軌衛星軌道的高精度確定是實現導航增強的基礎。本文重點描述了利用星載GNSS接收機實現自主實時定軌的詳細概念、實現過程和評估結果,保證了天象一號低軌導航增強演示驗證分系統的順利實施。
1 基于GNSS的低軌衛星自主實時定軌理論
1.1 自主實時定軌概念
基于GNSS的低軌衛星自主定軌是利用GNSS測量數據確定低軌衛星軌道的過程,其步驟分為信號接收、觀測量獲取與預處理、初步軌道確定以及軌道改進等過程[3]。衛星自主定軌按采用的測量數據類型可分為基于GNSS的單頻定軌、基于GNSS的雙頻定軌以及基于GNSS的雙模聯合定軌等,按時效性分為實時定軌和事后定軌,按是否采用動力學模型上為動力學定軌和幾何學定軌[4]。
為了解決天象一號衛星的自主實時定軌問題并保證足夠高的精度,天象一號星載GNSS接收機接收GPS和北斗雙模四頻的觀測數據實現定軌,其中雙頻數據能夠消除電離層誤差,進一步提高定軌精度[5]。為了實現導航信息實時生成及播發,天象一號星載GNSS接收機采用了雙模四頻自主實時定軌技術。
1.2自主實時定軌流程
自主實時定軌流程采用基于GNSS偽距和多普勒測量完成動力學實時定軌,為低軌導航增強的廣播電文提供精確的軌道信息。自主實時定軌流程采用模塊化的思想實現,按照功能主要分為系統初始化、觀測量獲取、幾何學軌道確定、動力學軌道積分、卡爾曼濾波以及軌道插值等模塊,其自主實時定軌過程如圖1所示。
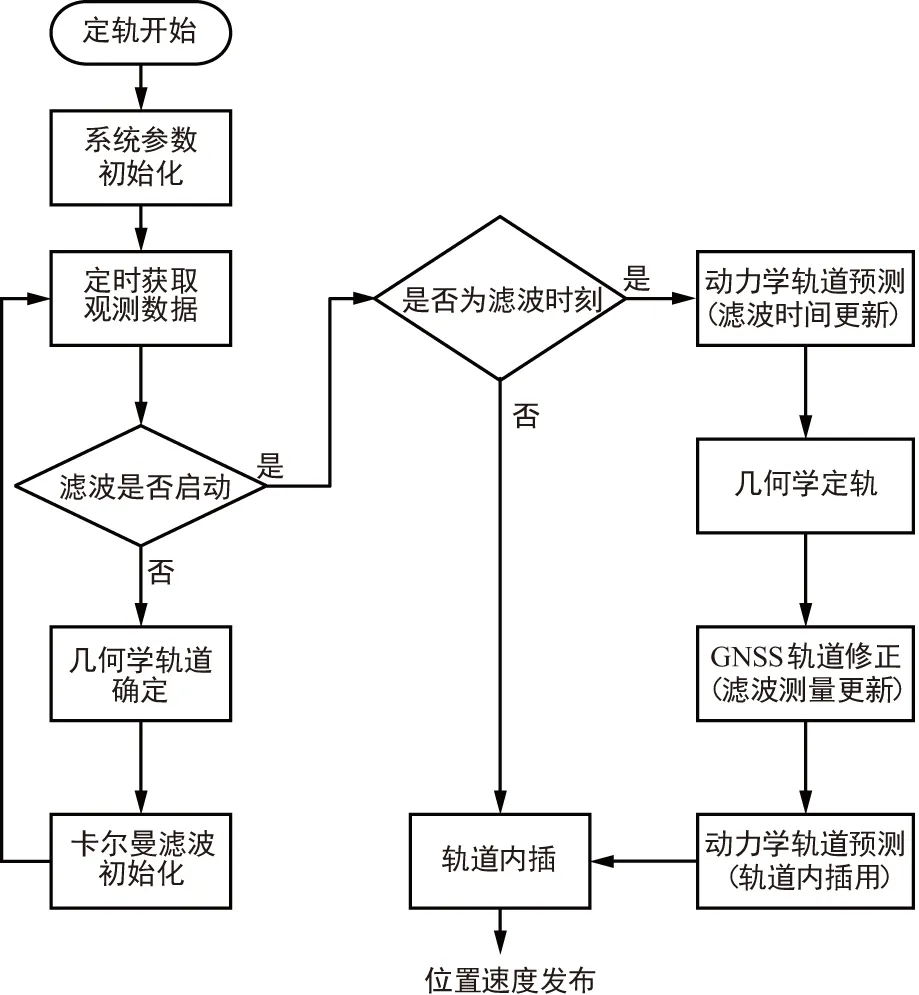
圖1 自主實時定軌流程Fig.1 Autonomous real-time orbit determination process
從圖1看出,基于GNSS偽距和多普勒的自主實時定軌過程如下:
① 星載GNSS接收機開機、捕獲和跟蹤衛星,完成首次單點定位[6];
② 進行系統初始化,主要包括定軌輸入、輸出以及中間變量結構體賦值等參數的復位以及卡爾曼濾波、單點定位等模塊中的參數設置[7];
③ 星載接收機將實時獲取觀測數據流輸出至觀測量獲取模塊,包括衛星星歷、偽距、多普勒等觀測數據[8];
④ 幾何學軌道確定模塊利用觀測量獲取模塊提供的數據對衛星進行實時單點定位和定速,在濾波開始后即探測和剔除觀測量中的偽距粗差,對卡爾曼濾波測量更新用的觀測數據進行質量控制;
⑤ 動力學軌道積分模塊以濾波器當前的狀態作為初始值,根據已知力學模型使用4階Runge-Kutta單步數值積分器預報下一觀測歷元的衛星狀態和狀態轉移矩陣,其中該模塊包含衛星加速度計算模型、單步積分器等子模塊[9];
⑥ 卡爾曼濾波模塊采用擴展卡爾曼濾波來估計衛星狀態參數,主要分為時間更新與測量更新兩大子模塊;時間更新子模塊包含動力學軌道積分和經驗加速度模型,測量更新子模塊采用序貫處理偽距以避免多維矩陣求逆計算[10];
⑦ 軌道插值模塊基于濾波得到的起始點軌道信息和外推得到的終止點軌道信息,采用5階Hermite多項式插值計算出對應時刻的衛星軌道,并將軌道結果實時輸出。
接收機收到定軌啟動命令后,首先利用單點定位和定速確定衛星位置和速度,然后利用單點定位結果將濾波器狀態量初始化,然后進入濾波定軌循環。為了減少運算復雜度,不用濾波器來確定每個歷元的衛星軌道,而是在定軌過程中用濾波成功后的信息再繼續進行動力學外推,最后利用濾波結果和外推結果來內插該時間段內的軌道狀態。
2 基于GNSS的自主實時定軌算法實現
2.1 自主實時定軌的硬件流程設計
在天象一號衛星平臺上采用GPS+BDS的雙模四頻接收機完成自主實時定軌,接收頻點為GPS L1/L2,BDS B1/B2。星上接收機完成單點定位后,即啟動自主實時定軌過程,除了星載GNSS接收機的基帶處理硬件外,還包含一片專用的星上定軌處理器,即型號為TI公司的DSP處理器,其運算能力經地面評估可滿足實時性要求。根據1.2節所述,結合上述處理流程,在硬件處理器內設計的實時定軌硬件流程如圖2所示。

圖2 基于DSP處理器的硬件流程設計圖Fig.2 Hardware process design based on DSP processor
在硬件實現過程中,各個模塊相對獨立,共分為6類處理模塊,在頂層程序中分別調用。整個硬件平臺設計實現的核心和關鍵是處理器計算資源和內存資源的合理調度與分配。整個硬件設計通過預先計算和地面反復驗證測試以保證定軌過程的穩定性和可靠性。
2.2 自主實時定軌的硬件時序設計
從2.1節可知,整個實時定軌主要分為定軌和濾波兩個過程。定軌和濾波都涉及大量的數學運算,在大運算量的約束條件下為了確保定軌結果實時輸出,在硬件實現上采用了多任務架構實現,即分為定軌任務、濾波任務和插值任務。為了滿足實時性要求,在插值前需要計算完成修正后的定軌結果和下一個時刻的預測結果。因此,定軌任務、濾波任務以及插值任務的時序配合就非常重要,為了確保能穩定可靠輸出,就需要詳細設計自主實時定軌的工作時序。
自主實時定軌啟動后,定軌任務包括幾何學軌道確定和動力學軌道積分處理,其中動力學軌道積分處理在卡爾曼濾波定軌的結果上進行動力學外推。濾波任務則包含卡爾曼濾波模塊和軌道修正模塊,卡爾曼濾波器啟動后根據觀測量不斷進行時間更新與測量更新來更新軌道狀態。插值任務則利用濾波和外推結果完成Hermite插值并輸出軌道狀態量。由于幾何學軌道確定模塊、動力學軌道積分模塊、卡爾曼濾波模塊以及軌道插值等模塊的運算復雜度均較高,因此需要劃分不同的時間周期以保證系統穩定性。設定濾波周期為20 s,經核算濾波任務執行時間為6 s,定軌任務執行時間為4 s內,之后則啟動插值任務每秒輸出定軌結果,這樣可以保證在每個歷元都有可用來內插的起始軌道狀態量和終止軌道狀態量。綜合以上分析,其自主實時定軌的硬件時序如圖3所示。

圖3 自主實時定軌的硬件時序設計Fig.3 Hardware timing design of autonomous real-time orbit determination
3 基于天象一號的自主定軌精度評估
為了驗證自主實時定軌的正確性和可靠性,采用天象一號星載GNSS接收機進行了在軌驗證,定軌模式分為單頻定軌和雙頻定軌兩種。除了輸出偽距和多普勒以外,星載GNSS接收機還輸出載波相位。利用載波相位實現事后精密單點定位經地面模擬器評估可以達到5 cm以內[11]。因此將低軌衛星下行的載波相位和定軌結果進行比對,可以實現對天象一號衛星自主實時定軌的可靠性和精度評估。
2019年6月5日天象一號A/B雙星發射成功后,進行了導航增強相關的多項在軌測試試驗,其中一項主要工作就是完成實時定軌精度的測試評估。采用天象一號星載GNSS接收機的L1頻點偽距和多普勒數據進行自主實時定軌,將定軌結果與基于載波相位的精密單點定位(PPP)事后處理結果進行對比,得到定軌誤差分布情況,如圖4所示。經統計,其收斂時間為2 h,三維位置誤差RMS值為1.106 m,速度誤差RMS值為0.001 2 m/s。

圖4 天象一號衛星自主實時單頻定軌結果Fig.4 Result of single-frequency orbit determination of the Tianxiang-1
除了單頻定軌結果外,還采用L1/L2雙頻偽距和多普勒數據進行了定軌精度評估。天象一號衛星軌道為500 km,由于受到部分電離層的影響,因而采用雙頻實時定軌,其定軌精度將可以得到提高,其誤差分布情況如圖5所示。經統計,其收斂時間為1 h,三軸位置誤差RMS值為0.837 9 m,速度誤差RMS值為0.000 9 m/s。同單頻相比,定軌精度提高到亞米級以內,同理論結果一致。

圖5 天象一號衛星自主實時雙頻定軌結果Fig.5 Result of dual-frequency orbit determination of the Tianxiang-1
4 結束語
本文重點描述了低軌衛星自主實時定軌的過程以及硬件實現,并依托天象一號衛星平臺開展了在軌飛行測試,并分別評估了基于GNSS的單頻和雙頻的實時定軌結果。經過與事后精密單點定位結果進行比對,其單頻定軌結果優于2 m,雙頻定軌結果優于1 m,且連續工作穩定可靠,充分證明利用自研的低軌星載GNSS接收機進行自主實時定軌是切實可行的。通過在低軌衛星中搭載自主實時定軌接收機可以達到亞米級定軌精度,這是在以通信和導航為主的低軌衛星上實現時空基準框架快速確定的一次創新。利用GNSS接收機實現自主實時定軌,減少了地面設施的支撐,將大大減少低軌衛星時空基準框架確定的復雜性和成本,為后續基于低軌通信和導航星座的導航增強實現提供了可行的技術手段。
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36