基于滑模觀測器和干擾觀測器的彈性高超聲速飛行器控制
2020-09-12 07:35:56王亞鋒范開國徐伯健
海軍航空大學學報 2020年3期
王亞鋒,范開國,徐伯健
(32021部隊,北京100094)
高超聲速飛行器由于其飛行速度快、突防能力強、難以被攔截等優點成為快速全球打擊領域的研究熱點。其飛行環境的大范圍變化、氣動/推進/彈性之間的嚴重耦合、氣動參數變化及外部干擾等因素導致高超聲速飛行器模型呈現出強時變、強耦合和強非線性等特征[1-3],這對高超聲速飛行器飛行控制提出了更高要求。
高超聲速飛行器飛行控制系統的位置、速度、姿態角、角速度、比力/過載、慣性攻角和航跡角等信息由傳感器測量系統提供。然而,在傳感器故障或高超聲速飛行器特殊飛行過程中,攻角、航跡角等部分控制狀態量難以測量,導致控制系統性能變差,甚至失穩[4-7]。因此,須尋求新的方法重構未知狀態量,進而設計飛行控制系統。文獻[8-11]提出了狀態觀測器以觀測系統未知狀態量。文獻[12-16]考慮系統魯棒性,設計了一種滑模觀測器重構系統未知狀態量。
高超聲速飛行器機身的推進一體化結構設計使得推進系統與飛行器外形結構的彈性形變之間存在耦合,容易引起彈性振動。為確保穩定飛行,必須考慮彈性模態的影響。此外,由于高超聲速飛行器在飛行過程中容易受到風場等外界干擾的影響,必須考慮解決外界干擾的問題。文獻[17]將彈性模態視為未知干擾,同時考慮風的影響,設計干擾觀測器估計集總干擾。
高超聲速飛行器縱向通道飛行控制系統可分為速度、高度2個功能子系統,由于高度子系統存在分層遞階的特點,文獻[18-19]考慮反步法具有將一個高階系統轉化為一系列一階系統的能力,將之應用在高度子系統控制中。針對反步法可能導致的系統復雜度爆炸問題,文獻[20]進一步提出了動態逆控制方法。然而,如何考慮攻角、航跡角難以測量以及彈性耦合、外部干擾影響的實際問題,設計高超聲速飛行器飛行控制系統尚未得到解決。
本文考慮難以測量的攻角、航跡角以及彈性耦合、風場等外部干擾影響,設計滑模觀測器估計未知攻角、航跡角;設計干擾觀測器,估計包含彈性耦合、外部干擾的集總干擾。基于滑模觀測器和干擾觀測器估計量,分別設計高度子系統和速度子系統的舵面偏角和燃油當量,實現對期望高度和速度信號的有效跟蹤。
1 高超聲速飛行器動力學
考慮彈性耦合及風場等外部飛行環境的影響,高超聲速飛行器縱向通道動力學模型為:
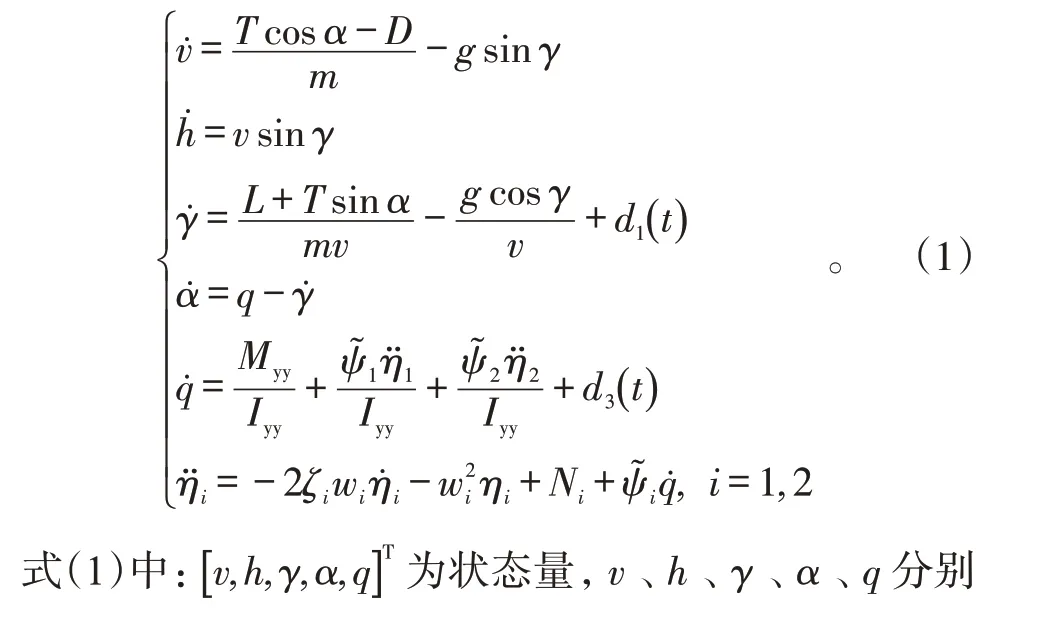
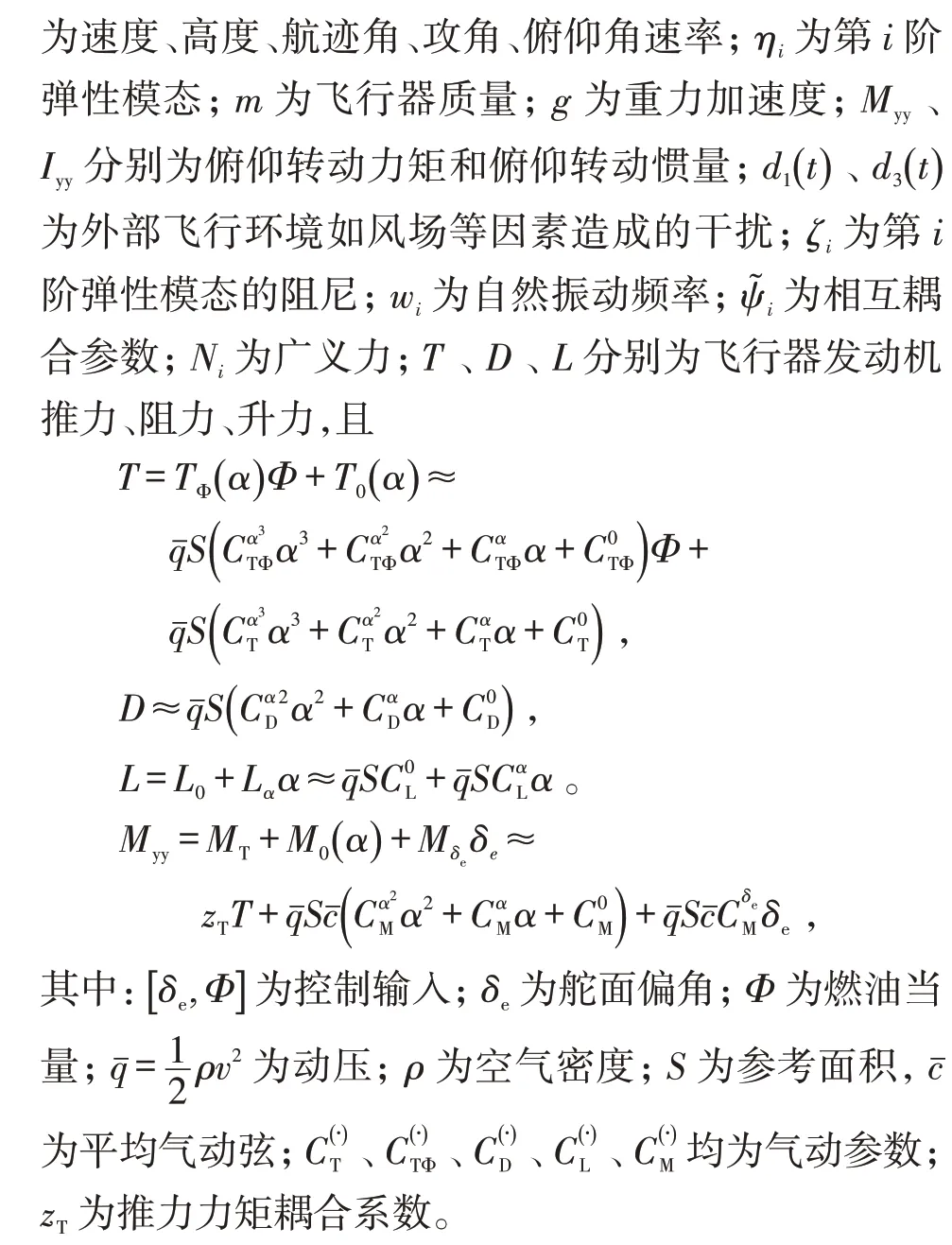
將彈性耦合、外部擾動用集總擾動表示,則式(1)可轉換為:
2 基于滑模觀測器的攻角、航跡角重構
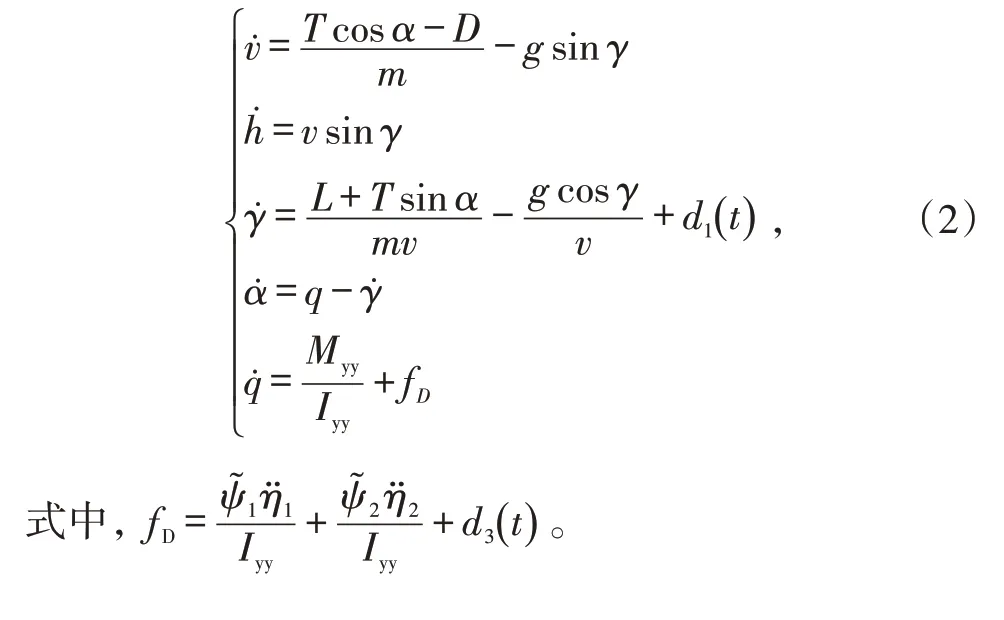
針對慣性導航系統故障及高超聲速、小攻角飛行條件下,攻角、航跡角未知且不可測的問題,本文利用可測飛行高度、俯仰角速率估計誤差設計滑模觀測器,重構攻角、航跡角。
定義估計誤差:
式(9)中:
將飛行器參數帶入矩陣A,選取合適h1、h2、h3、h4使滑模觀測誤差動態方程式(9)的所有特征值具有負實部。此時,滑模觀測器的觀測誤差收斂。
3 基于滑模觀測器和干擾觀測器的飛行控制
將高超聲速飛行器縱向通道模型解耦成高度子系統和速度子系統,設計干擾觀測器,估計彈性耦合及風場等外部飛行環境的造成的集總擾動,并利用滑模觀測器及干擾觀測器的估計值,設計控制器δe和Φ,實現高度與速度從初始值到期望值的跟蹤。
3.1 高度子系統
定義高度跟蹤誤差為:
3.2 速度子系統
定義速度跟蹤誤差為:

注釋:由于基于干擾觀測器的高超聲速飛行器縱向通道動態逆控制系統穩定性在文獻[8]中得到證明,進一步結合滑模觀測器式(5),能夠證明由控制器式(17)、(21)、(24)、(28)所構成的閉環系統穩定。考慮篇幅限制,本文不再贅述。
4 仿真分析
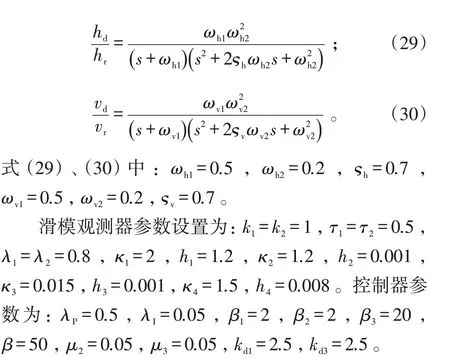
仿真結果如圖1~8 所示。由圖1、2 可知,基于滑模觀測器設計的高超聲速飛行器縱向通道控制器實現了對高度和速度參考信號的有效跟蹤。其中,基于可測飛行高度、俯仰角速率估計誤差構建的滑模觀測器實現了對未知攻角、航跡角的重構。可測飛行高度、俯仰角速率估計誤差見圖3,滑模函數見圖4,攻角和航跡角的估計誤差曲線α?、γ?見圖5。圖6、7 表明滑模觀測器和干擾觀測器對f1+d1、f3+fD進行了有效估計。高度和速度子系統的控制輸入舵面偏角δe、燃油當量Φ 如圖8所示。
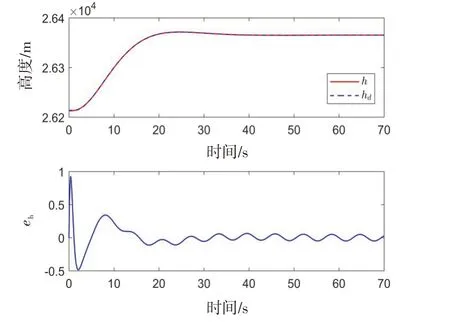
圖1 高度跟蹤和跟蹤誤差ehFig.1 Altitude tracking and tracking error eh

圖2 速度跟蹤和跟蹤誤差evFig.2 Speed tracking and tracking error ev
圖3 滑模觀測器高度、俯仰角估計誤差 Fig.3 Estimation errors of sliding mode observer
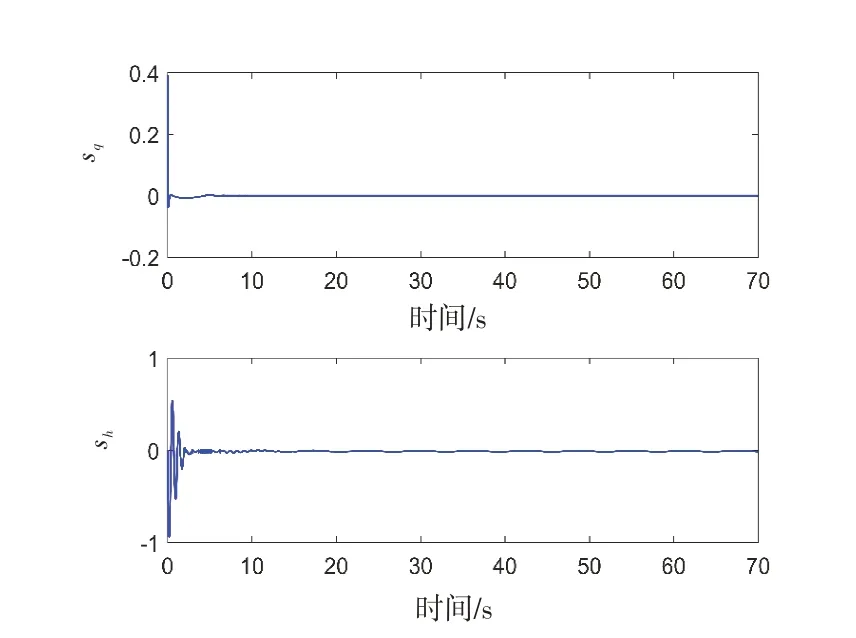
圖4 滑模函數Fig.4 Sliding mode function

圖5 滑模觀測器攻角、航跡角估計誤差? Fig.5 Estimation errors of sliding mode observer
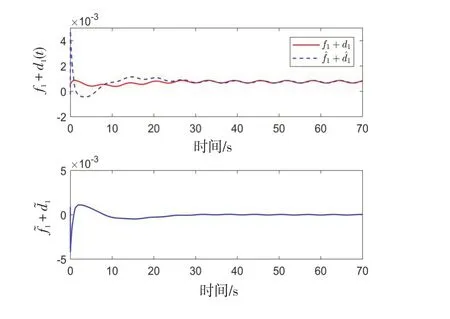
圖6 f1+d1 的估計及估計誤差?Fig.6 Estimation of f1+d1 and estimation error

圖7 f3+fD 的估計及估計誤差Fig.7 Estimation of f3+fD and estimation error

圖8 控制輸入Fig.8 Control inputs
5 結論
本文針對攻角、航跡角未知且存在彈性耦合、陣風等外部干擾的高超聲速飛行器縱向通道動力學,設計了基于滑模觀測器和干擾觀測器的飛行控制系統。該控制方法利用滑模觀測器重構攻角、航跡角,利用干擾觀測器估計包含彈性耦合、外部干擾的集總擾動,利用基于反步法的動態面控制設計高度子系統和速度子系統的舵面偏角和燃油當量,進而實現對高度和速度參考信號的有效跟蹤。最后,通過仿真測試驗證了該方法的有效性。
