光機身氣動特性計算與試驗結果相關性分析
2020-09-15 02:02:24龍海斌吳裕平
直升機技術 2020年3期
龍海斌,吳裕平
(中國直升機設計研究所,江西 景德鎮 333001)
0 引言
在直升機設計中,光機身通常指去掉各種部件之后的機身和尾梁等部分。光機身是直升機駕駛員和乘員乘坐,安裝發動機、傳動機構和油箱,裝載貨物和任務設備等的主要空間,因此空間體積比較大。通常在光機身外側會安裝主槳轂、起落架、天線等部件,光機身外形不僅與內部各系統的布置緊密相關,而且光機身在人的觀察視野中所占的比例比較大,通常給人留下比較深刻的印象,大多數觀察者通過光機身的外形來初步評價直升機設計是否美觀、舒適等。由于直升機駕駛艙頂棚的高度受到駕駛員身高和頭盔的限制,機身腹部受到乘員乘坐、貨物裝載和布置任務設備等的限制,機身尾部受到貨物裝卸(如有尾艙門)和減重設計等限制,因此大部分直升機光機身的減阻設計受到很大的限制。根據以往的型號設計經驗,光機身的氣動阻力通常占全機廢阻的20%~40%,是直升機前飛時的主要阻力來源之一。目前在直升機光機身氣動特性風洞試驗和CFD計算方面開展了一部分研究。在型號研制過程中,通常在風洞中會對光機身進行風洞測力試驗,得到一定攻角和側滑角范圍內的氣動特性數據。文獻[1]對AH-64最新改進型直升機的光機身俯仰力矩特性進行了風洞試驗,并與帶平尾等部件的氣動特性進行了對比分析。文獻[2,3]通過風洞試驗獲得了兩種直升機光機身的縱向氣動特性,并與加裝渦流發生器之后的縱向氣動特性進行了對比分析。文獻[4]在某非定常低噪聲低湍流風洞對某直升機光機身進行了氣動特性測量試驗,得到了不同風速、攻角和側滑角狀態的光機身氣動特性;之后采用CFD方法計算了該風洞試驗模型的氣動特性,與風洞試驗結果對比分析表明:CFD計算得到的氣動特性結果與風洞試驗結果相差比較小。文獻[5]對S-97共軸高速直升機的光機身縱向氣動特性進行了CFD計算,網格為笛卡爾網格,湍流模式采用S-A模式。并與風洞試驗結果進行了對比分析,結果表明CFD計算值與風洞試驗結果相差比較小。文獻[6]采用CFD計算方法對某共軸式直升機的機身氣動特性進行了計算分析,提取出了光機身部分氣動特性數據進行分析。本文首先采用CFD計算方法對三種不同類型直升機的光機身氣動特性進行了計算分析,包括某常規單旋翼直升機、某無人直升機和某共軸式直升機,之后運用增量法和比例法與風洞試驗結果進行了相關性分析。
1 研究方法概述
1.1 風洞試驗
直升機光機身氣動特性測量試驗在某閉口回流式風洞中進行,試驗段的截面形狀為扁八角形。在風洞試驗過程中采用腹部支撐方式安裝模型,支撐機構主要由兩根圓柱形的支桿組成,在靠近風洞地板的一側加裝了翼型整流罩。采用塔式六分量機械應變外天平測量光機身的力和力矩。該類型的天平穩定性比較好,受外界電磁干擾比較少。在風洞試驗過程中有實時監測系統,每次試驗待測量結果穩定之后進行數據采集。最終的試驗數據進行了支架干擾修正和洞壁干擾修正。支架干擾修正采用鏡象兩步法,即首先將光機身反裝在支架上,進行一次風洞試驗,然后在機身腹部上加裝外形相同的支架,再進行一次風洞試驗,得到支架的氣動干擾數據。光機身風洞試驗模型通常包含機身部分和尾梁部分。某常規單旋翼直升機和某共軸式直升機光機身的氣動布局如圖1(a)和(b)所示,某無人直升機光機身的風洞試驗模型如圖1(c)所示。其中某常規單旋翼直升機和某無人直升機光機身的機腹到尾梁的過渡段外形變化比較劇烈,而某共軸式直升機光機身的流線型比較好。由于風洞試驗段截面尺寸的限制,風洞試驗過程中采用縮比模型,三種類型直升機光機身的風洞試驗模型的長度大致相等。
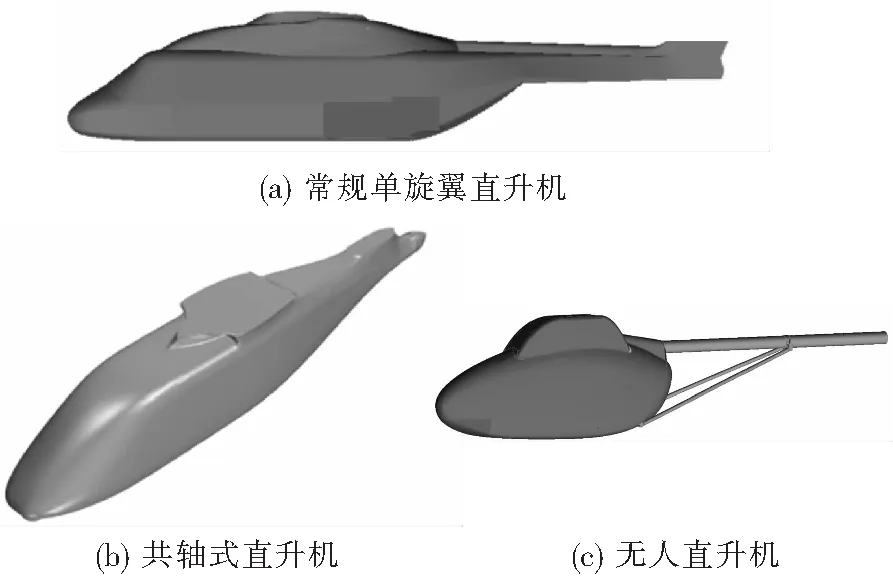
圖1 光機身氣動布局與風洞試驗模型圖
1.2 CFD計算
光機身氣動特性CFD計算模型與風洞試驗模型的外形一致,某無人直升機的計算模型如圖1(c)所示。在對直升機光機身氣動特性進行CFD計算之前,首先要對光機身周圍的流體域進行網格劃分。在整個氣動特性計算過程中,網格劃分約占用60%~80%的時間,網格質量對計算結果的準確度和速度有比較大的影響。目前CFD計算中主要采用結構化和非結構化兩種類型的網格。結構化網格的優勢主要是網格生成質量比較好,同時更容易接近實際的模型,對區域的邊界擬合也更容易實現。但是結構化網格通常只適用于比較簡單的區域。非結構化可以實現對任意形狀和任意連通區域的網格劃分,對不規則區域的適應能力很強,近年來獲得了快速發展。為了滿足工程計算中的快速實現和操作簡單的需求,本次計算采用八叉樹方法對計算域進行非結構化四面體網格劃分,劃分得到的四面體網格數量在40萬左右,沒有劃分邊界層網格。之后在求解器中將四面體網格轉化為多面體網格,得到的多面體網格數量約為原來四面體網格數量的20%~40%,同時可以提高計算速度和精度。某共軸式直升機光機身的四面體網格劃分如圖2所示。
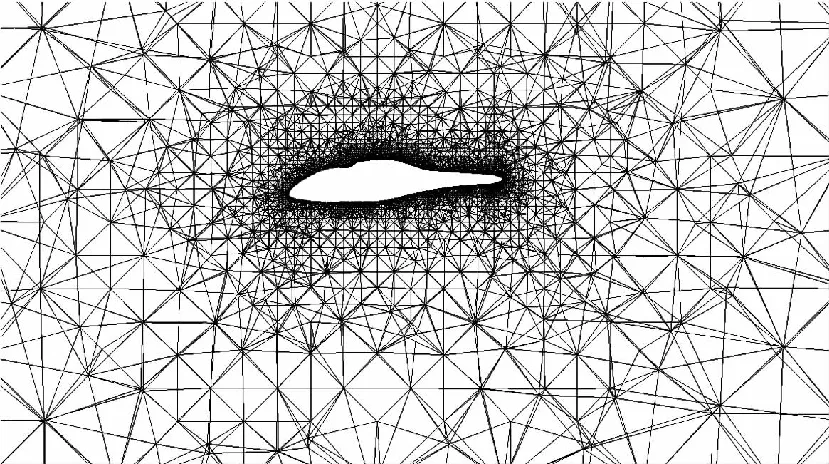
圖2 網格劃分示意圖
空氣流動的控制方程為Navier-Stokes方程,其積分守恒形式如下:

(1)
式中:W為守恒變量,Fc和Fv分別為對流通量和粘性通量。
采用有限體積方法(Finite Volume Method, FVM)求解方程式(1),對流項采用Roe-FDS格式求解,并通過解的線性重構獲得二階精度,粘性項采用二階中心型格式離散。時間離散采用隱式時間推進技術。
目前求解N-S方程的方法主要有以下四種:直接數值模擬(DNS)方法、大渦模擬(LES)方法、雷諾平均N-S方程(RANS)方法和格子玻爾茲曼(LBM)方法。受計算資源和計算時間的限制,通常采用雷諾平均N-S方程(RANS)方法計算光機身的氣動特性。雷諾平均N-S方程方法的基本思想是把湍流瞬時運動分解為平均運動和脈動運動兩部分,之后把脈動運動部分對平均運動的貢獻通過雷諾應力項來模化,即通過湍流模式來封閉雷諾平均N-S方程,使之可以求解。通常采用的湍流模式有零方程模式、一方程模式和兩方程模式等。本次計算采用一方程S-A湍流模式,該湍流模式能夠比較好地模擬含逆壓梯度的邊界層流動,同時對網格的適應性比較強,廣泛應用于航空航天領域中的氣動特性計算之中。在計算過程中設置計算域遠場邊界為壓力遠場條件,來流速度設置為60m/s,與風洞試驗中的來流速度一致。
2 結果對比分析
三種類型直升機光機身氣動特性的CFD計算值和風洞試驗結果如圖3所示。圖中C-風洞表示某常規單旋翼直升機光機身氣動特性風洞試結果,C-計算表示某常規單旋翼直升機光機身氣動特性CFD計算結果,W表示某無人直升機氣動特性結果,G表示某共軸式直升機氣動特性結果,下文相同。從圖中可以看出,光機身氣動特性的CFD計算值與風洞試驗結果的變化趨勢一致。從圖3(a)中可以看出,某無人直升機光機身的阻力系數絕對值比較大。分析圖3(b)中的升力系數變化趨勢可以看出,常規單旋翼直升機光機身的升力系數比較小,三種類型直升機光機身升力系數的斜率基本相等。由圖3(c)中可以發現,某共軸式直升機光機身的俯仰力矩系數的斜率比較大。隨著攻角的增大,光機身俯仰力矩系數不斷增大,因此需要設計更大面積的平尾來保證直升機在俯仰方向上的穩定性。
分析圖3(d)中側向力系數的變化可以看出,三種類型直升機光機身的側向力系數的大小基本相等。從圖3(e)中可以發現某常規單旋翼直升機和某無人直升機光機身的滾轉力矩系數比較小。由圖3(f)中的偏航力矩系數變化圖可以看出,某共軸式直升機光機身的偏航力矩系數斜率比較大。同時由于光機身在航向方向上是不穩定的,這也導致某共軸式直升機的垂尾面積相對比較大。
3 相關性分析
3.1 增量法分析
針對三種類型直升機光機身氣動特性CFD計算值與風洞試驗結果之間的差別,首先采用增量法分析了兩者之間的差值隨攻角或側滑角的變化情況。從圖4(a)中可以看出,在0°~16°攻角范圍內,相比于其他類型直升機光機身風洞試驗結果與CFD計算值之間的差值,某共軸式直升機光機身兩種結果的差值比較小。這是由于某常規單旋翼直升機和某無人直升機機身腹部到尾梁的過渡段外形變化比較劇烈,因此壓差阻力比較大。分析圖4(b)中的升力系數差值變化趨勢可以發現,在0°攻角時,三種類型直升機光機身升力系數的差值最大,隨著攻角絕對值的增大,升力系數CFD計算值與風洞試驗結果之間的差值逐漸減小。由圖4(c)可以發現,在正攻角范圍內,某常規單旋翼直升機光機身俯仰力矩系數兩種結果的差別比較大。某共軸式直升機光機身俯仰力矩系數兩種結果的差值隨攻角絕對值的增大不斷增大。
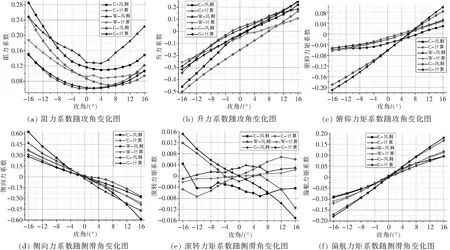
圖3 機身氣動特性計算與試驗結果對比圖
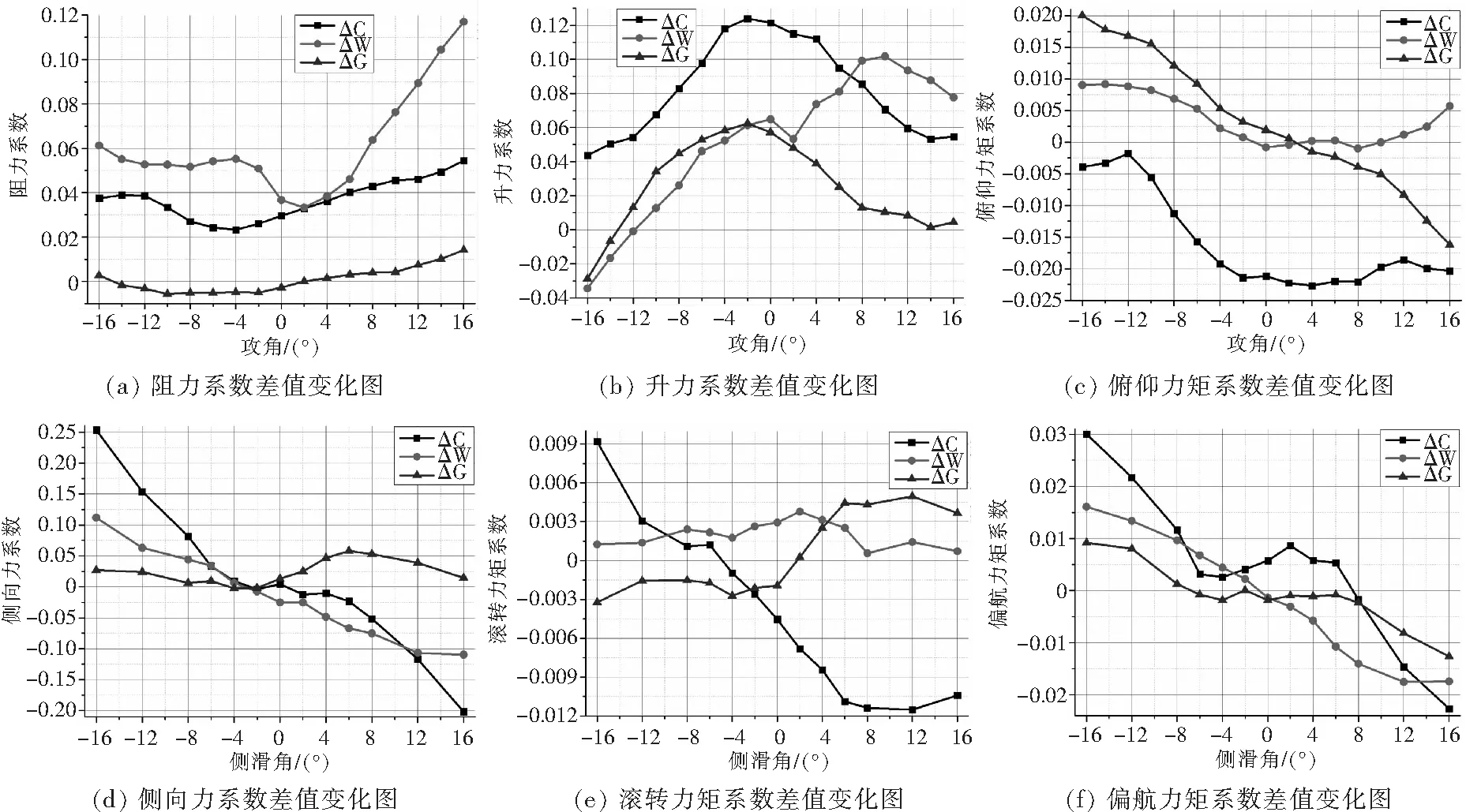
圖4 氣動特性試驗與計算結果差值對比圖
綜合圖4(d)到圖4(f)中橫向氣動特性CFD計算值與風洞試驗結果之間的差值可以看出,某常規單旋翼直升機光機身的側向力、滾轉力矩和偏航力矩系數的差值比較大,其他兩種類型直升機光機身橫向氣動特性兩種結果的差值比較小。這是由于某常規單旋翼直升機光機身在橫向方向上的氣動外形變化比較大,因此流動分離比較大。
3.2 比例法分析
三種類型直升機光機身氣動特性風洞試驗結果與CFD計算值之間的比值變化趨勢如圖5所示。從圖中可以發現,在部分攻角或側滑角范圍內氣動特性風洞試驗結果與CFD計算值之間的比值變化比較劇烈。從圖5(a)中可以看出,在正攻角范圍內某無人直升機光機身氣動特性兩種結果的比值比較大,某共軸式直升機光機身兩種結果的比值比較小。這是由于某共軸式直升機光機身的流線型比較好,因此流動分離比較小。分析圖5(b)至圖5(f)中的結果可以發現,在小攻角或小側滑角狀態,升力系數、俯仰力矩系數、側向力系數、滾轉力矩系數和偏航力矩系數的兩種結果的比值比較大,而且變化劇烈。這是由于在小攻角或小側滑角狀態,上述力和力矩系數的數值比較小,CFD計算過程中的一些小擾動或小誤差都可能導致比值變化非常大。隨著攻角或側滑角絕對值的增大,兩種結果的比值基本上趨于某個固定值。
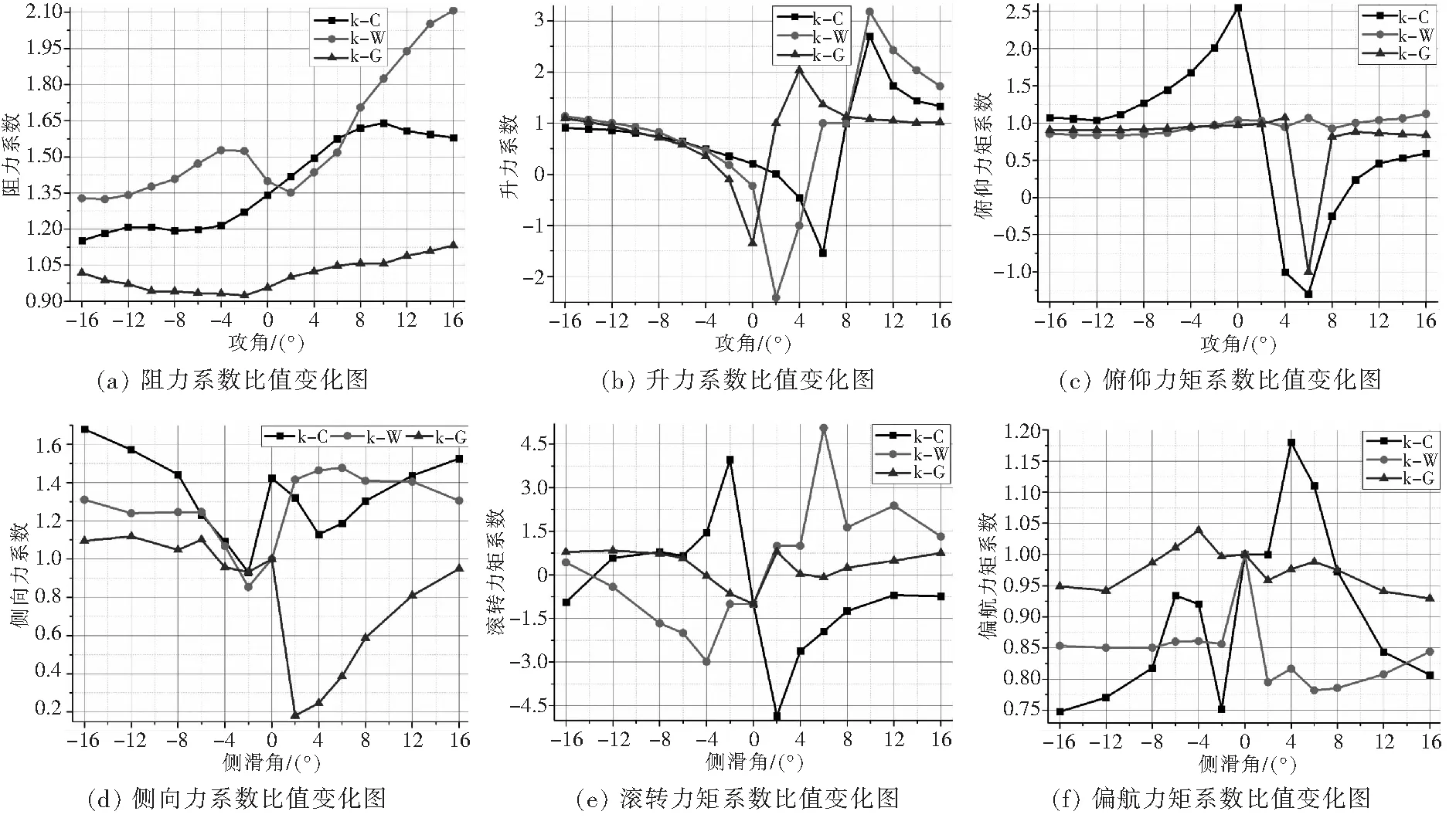
圖5 氣動特性試驗與計算結果比值對比圖
4 總結與討論
通過對三種類型直升機光機身氣動特性進行CFD計算,并與風洞試驗結果進行對比分析,可得出如下結論:
1)直升機光機身氣動特性CFD計算值的變化趨勢與風洞試驗結果一致。結合增量法和比例法分析得到的相關性結果,可以發現在大部分攻角或側滑角范圍內,光機身氣動特性CFD計算結果具有一定的可靠性。
2)在小攻角或側滑角范圍內,光機身氣動特性CFD計算值與風洞試驗結果之間的差值比較小,但是兩種結果的比值比較大且變化劇烈。
3)在大部分攻角或側滑角范圍內,光機身氣動特性CFD計算值與風洞試驗結果之間的比值約為某個固定值。這為光機身氣動特性CFD計算結果的修正提供了一定的參考。