基于虛擬駕駛員仿真的非定常尾流下直升機(jī)飛行品質(zhì)研究
2020-09-15 02:02:24徐玉貌
直升機(jī)技術(shù) 2020年3期
關(guān)鍵詞:駕駛員
王 濱,徐玉貌
(中國直升機(jī)設(shè)計(jì)研究所,江西 景德鎮(zhèn) 333001)
0 引言
艦載直升機(jī)的飛行環(huán)境惡劣,尤其是艦面尾流場復(fù)雜多變,導(dǎo)致直升機(jī)的起飛和著艦受到很嚴(yán)格的條件限制,飛行時(shí)機(jī)和任務(wù)時(shí)間也受到很大的限制,飛行員在起飛離艦與返場著艦過程中的工作負(fù)荷相當(dāng)大,由此造成飛行事故的概率也遠(yuǎn)比陸基直升機(jī)高[1]。因此,分析艦面非定常尾流場對(duì)機(jī)艦動(dòng)態(tài)配合飛行品質(zhì)的影響,對(duì)艦載直升機(jī)良好的飛行品質(zhì)設(shè)計(jì)意義重大,不僅是高質(zhì)量完成任務(wù)的基本保證,也對(duì)飛行安全具有重要作用[2]。
本文選取國外常見的三種下滑-著艦進(jìn)近軌跡[3],在建立的直升機(jī)飛行動(dòng)力學(xué)模型中,運(yùn)用基于虛擬駕駛員的仿真分析方法,開展定常與非定常尾流對(duì)機(jī)艦動(dòng)態(tài)配合飛行品質(zhì)的影響的分析工作,并給出著艦操作建議,為設(shè)計(jì)艦載直升機(jī)優(yōu)良的飛行品質(zhì)提供理論指導(dǎo)。
1 計(jì)算方法
基于虛擬駕駛員[4]的仿真分析方法能夠生成虛擬駕駛員操縱輸入,驅(qū)動(dòng)非線性直升機(jī)模型按預(yù)定軌跡進(jìn)行飛行。該方法根據(jù)用戶定義的約束條件,基于赫爾姆斯曼行為方法(Helmsman Behavior method)自動(dòng)生成飛行軌跡。該方法采用“3-arc”假設(shè)將3個(gè)任務(wù)點(diǎn)(例如先前、當(dāng)前和下一時(shí)刻)進(jìn)行光滑連接生成軌跡;然后采用獨(dú)特的增強(qiáng)逆仿真技術(shù)根據(jù)預(yù)定的軌跡生成操縱;最后,將前饋控制與反饋補(bǔ)償器結(jié)合,進(jìn)行高精度的軌跡跟蹤仿真。
1)增強(qiáng)逆仿真技術(shù)
相比于逆仿真技術(shù)[5],為了提高其計(jì)算精度,增強(qiáng)逆仿真技術(shù)將其線性模型逆過程替換成為了初始配平狀態(tài)預(yù)估算法,如圖1所示。該算法用于預(yù)測給定配平點(diǎn)處的飛行器滾轉(zhuǎn)和俯仰姿態(tài),每個(gè)時(shí)間步的姿態(tài)角采用分段插值算法獲得。利用姿態(tài)角隨時(shí)間的變化,求出角速度及角加速度的變化。求解得到的角加速度和線加速度(由預(yù)定軌跡求得)在隨后的第一次動(dòng)態(tài)配平過程中作為運(yùn)動(dòng)約束。
在第一次動(dòng)態(tài)配平過程中,飛行器角運(yùn)動(dòng)被重新定義,自動(dòng)飛行控制系統(tǒng)的控制信號(hào)能夠被計(jì)算出來。第二次動(dòng)態(tài)配平過程采用了第一次的角運(yùn)動(dòng)及控制信號(hào),進(jìn)一步求解軌跡跟蹤的操縱信號(hào)。求解得到的給定配平點(diǎn)的操縱信號(hào)通過插值,進(jìn)一步得到時(shí)間連續(xù)的操縱。
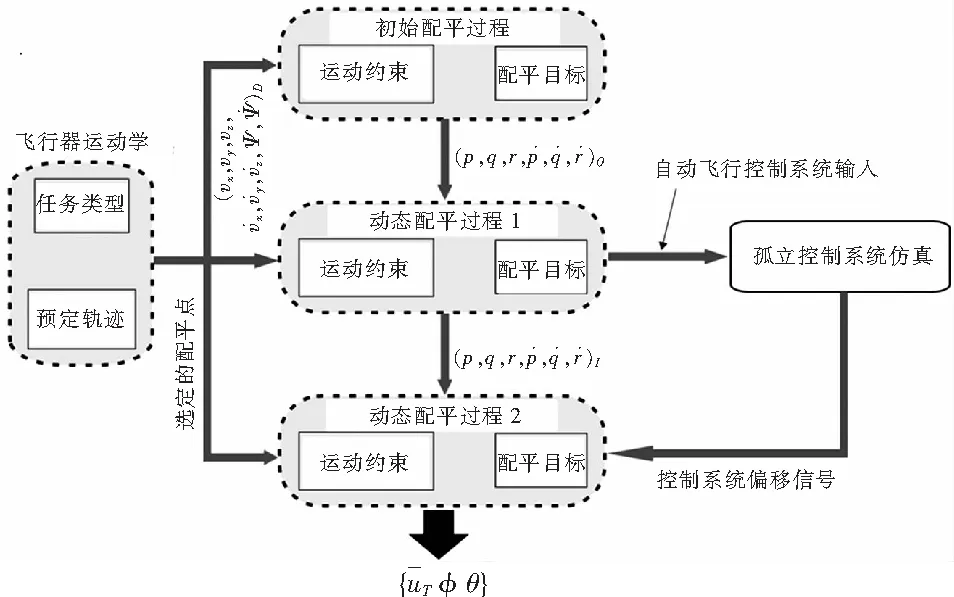
圖1 增強(qiáng)逆仿真方法
2)反饋補(bǔ)償器
由于數(shù)值插值過程中會(huì)產(chǎn)生傳遞誤差,并且在動(dòng)態(tài)配平過程中由于非周期時(shí)變氣動(dòng)環(huán)境等的影響可能會(huì)產(chǎn)生軌跡跟蹤誤差,因此有必要引入一個(gè)反饋補(bǔ)償器。如圖2所示。
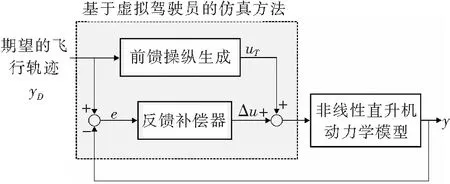
圖2 用于誤差修正的反饋補(bǔ)償器
根據(jù)應(yīng)用方式的不同,反饋補(bǔ)償器的結(jié)構(gòu)可采用經(jīng)典的控制理論、魯棒控制方法、優(yōu)化控制方法等。經(jīng)典的PID控制方法由于其結(jié)構(gòu)簡單,并且應(yīng)用于直升機(jī)的時(shí)候每個(gè)操縱通道都是解耦的,因此用于反饋補(bǔ)償器比較有益。但是,由于直升機(jī)動(dòng)力學(xué)及操縱的高度耦合性,反饋增益的選擇過程是非常耗時(shí)的。由于本方法前饋操縱是由精確的動(dòng)態(tài)配平優(yōu)化生成的,用于誤差修正的反饋補(bǔ)償器不是經(jīng)常需要用到,增益的選擇過程需求量不大,該增益的選擇可用自動(dòng)增益選擇算法進(jìn)行實(shí)現(xiàn)。
2 算例仿真
以某型右旋艦載直升機(jī)和某艦為例開展了仿真計(jì)算,計(jì)算時(shí)分別設(shè)置環(huán)境來流風(fēng)向?yàn)?°,風(fēng)速為55km/h,艦載機(jī)下滑角為3°,船速為0,計(jì)算直升機(jī)三種下滑-著艦進(jìn)近軌跡下的飛行品質(zhì)。計(jì)算條件具體設(shè)置如表1所示,進(jìn)近軌跡如圖3所示。
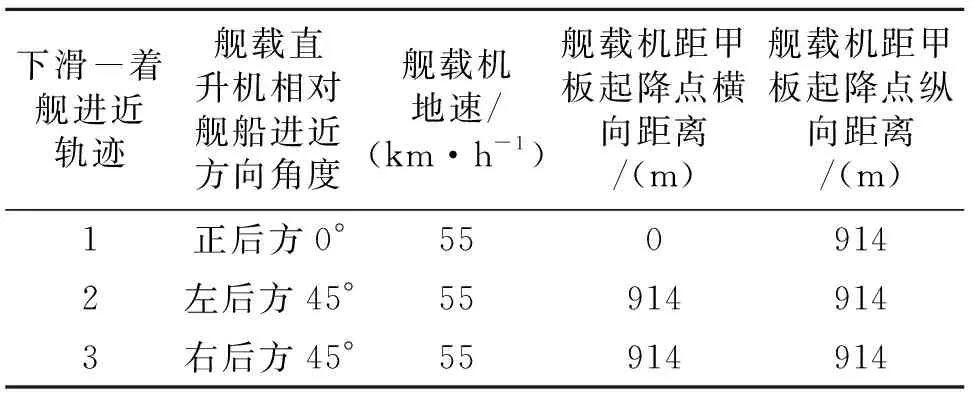
表1 計(jì)算條件設(shè)置
3 仿真結(jié)果
機(jī)艦動(dòng)態(tài)配合過程的下滑-著艦進(jìn)近軌跡的飛行姿態(tài)、操縱量變化和駕駛員操縱功率譜分析,計(jì)算結(jié)果見圖4-圖12。圖中,垂直于橫坐標(biāo)軸的黑色實(shí)線為艦船尾流影響區(qū)分界線,該分界線右側(cè)代表直升機(jī)進(jìn)入了艦船尾流影響區(qū)。紅色長虛線代表無艦船尾流影響時(shí)的計(jì)算結(jié)果;黑色短虛線代表考慮定常尾流時(shí)的計(jì)算結(jié)果;藍(lán)色實(shí)線代表考慮非定常尾流時(shí)的計(jì)算結(jié)果。
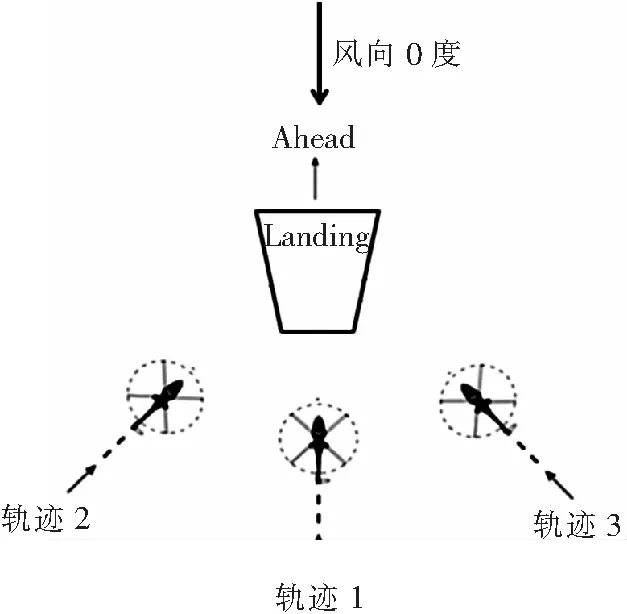
圖3 直升機(jī)三種下滑-著艦進(jìn)近軌跡
3.1 飛行姿態(tài)分析
從圖4-圖6可以看出,在直升機(jī)下滑-著艦進(jìn)近過程中,進(jìn)入非定常尾流影響區(qū)后,軌跡1的俯仰角和滾轉(zhuǎn)角呈周期振蕩趨勢(shì),波動(dòng)較為明顯;軌跡3的俯仰角幅值偏大,最大為9°;相比之下,軌跡2的姿態(tài)更為平穩(wěn)。
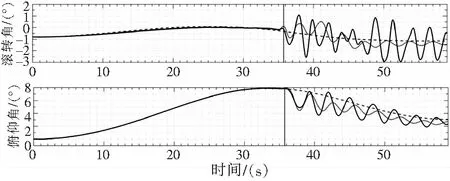
圖4 下滑-著艦進(jìn)近計(jì)算軌跡1飛行姿態(tài)分析
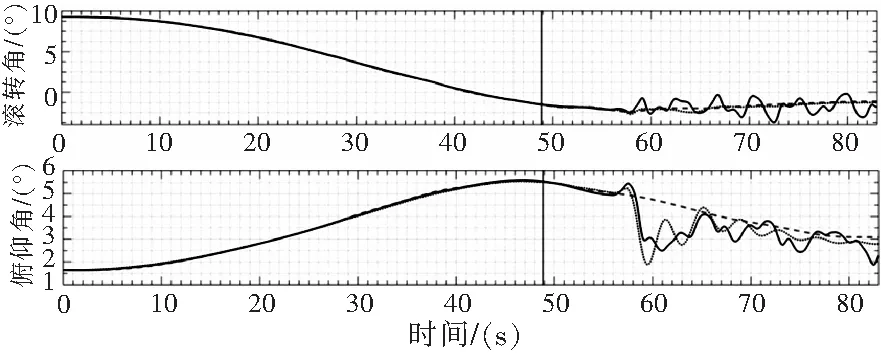
圖5 下滑-著艦進(jìn)近計(jì)算軌跡2飛行姿態(tài)分析
3.2 操縱量變化分析
從圖7-圖9可以看出,在直升機(jī)下滑-著艦進(jìn)近過程中,進(jìn)入非定常尾流影響區(qū)后,軌跡1的縱向操縱和橫向操縱量呈周期振蕩趨勢(shì)且幅值較大,波動(dòng)較為明顯;軌跡3在第60s左右橫向操縱和腳蹬操縱量過于劇烈;相比之下,軌跡2的操縱量更為平穩(wěn)。
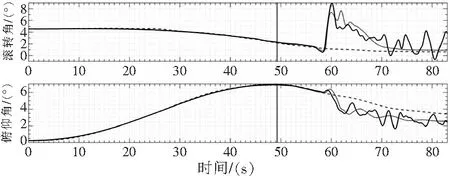
圖6 下滑-著艦進(jìn)近計(jì)算軌跡3飛行姿態(tài)分析
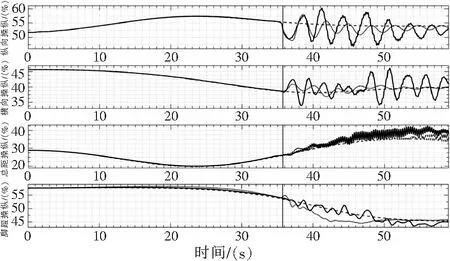
圖7 下滑-著艦進(jìn)近計(jì)算軌跡1操縱量變化情況分析
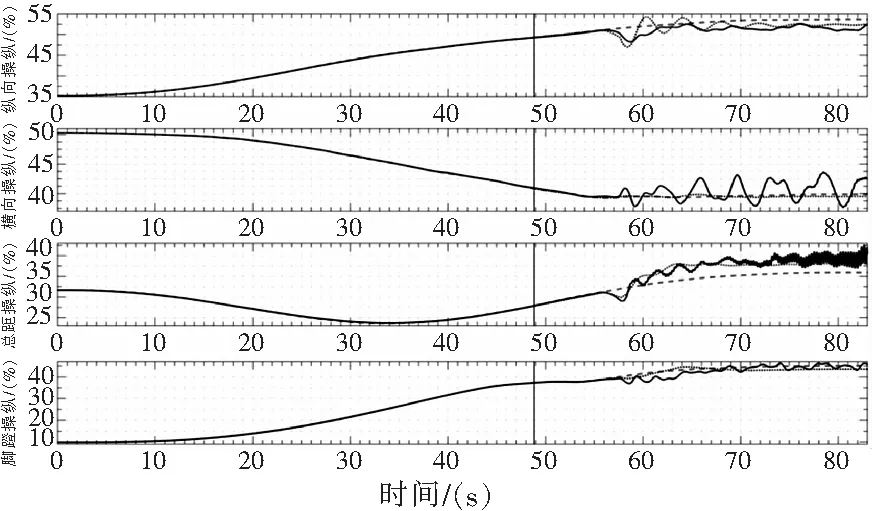
圖8 下滑-著艦進(jìn)近計(jì)算軌跡2操縱量變化情況分析
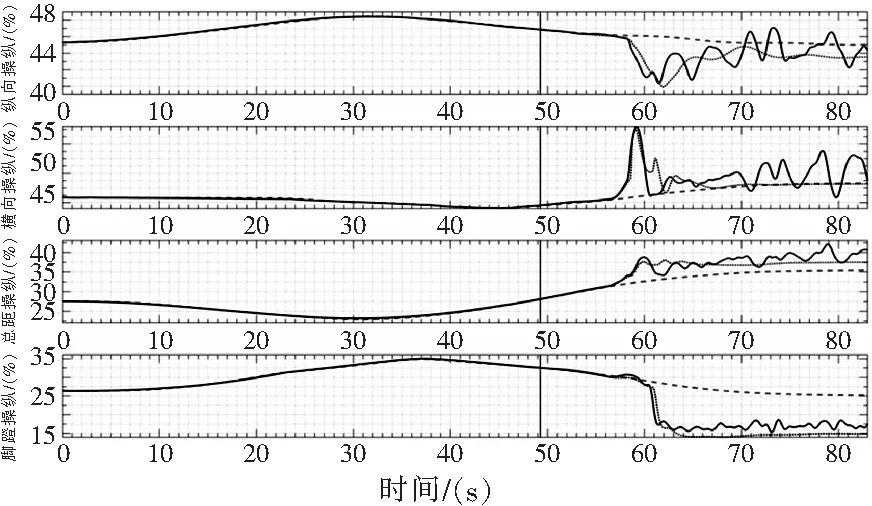
圖9 下滑-著艦進(jìn)近計(jì)算軌跡3操縱量變化情況分析
3.3 駕駛員操縱功率譜分析
考慮非定常艦船尾流影響,對(duì)下滑-著艦進(jìn)近過程中進(jìn)入艦船尾流影響區(qū)之后的駕駛員操縱時(shí)間歷程進(jìn)行功率譜分析。如圖10-圖12所示:軌跡1的縱向操縱和橫向操縱變化比較劇烈,軌跡3橫向操縱變化比較劇烈,在低頻段出現(xiàn)能量集中點(diǎn),駕駛員負(fù)荷較大;相比之下,軌跡2的操縱功率譜未出現(xiàn)能量峰值,負(fù)荷較小。
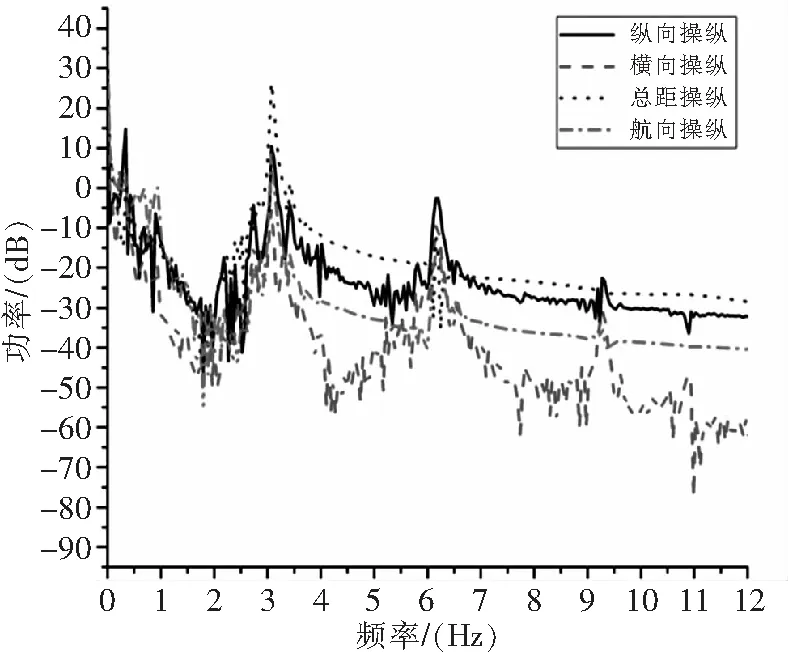
圖10 下滑-著艦進(jìn)近計(jì)算軌跡1駕駛員操縱功率譜分析
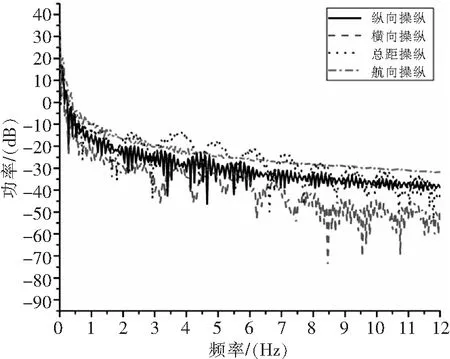
圖11 下滑-著艦進(jìn)近計(jì)算軌跡2駕駛員操縱功率譜分析
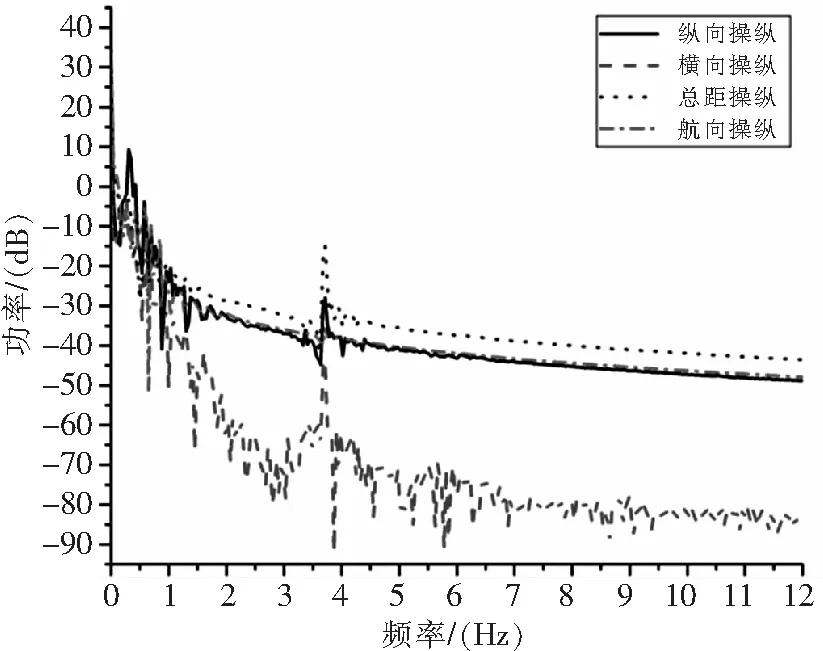
圖12 下滑-著艦進(jìn)近計(jì)算軌跡3駕駛員操縱功率譜分析
4 結(jié)論
1)從飛行姿態(tài)和操縱量變化分析結(jié)果可以看出,下滑-著艦進(jìn)近時(shí)相比于定常尾流,非定常尾流場對(duì)機(jī)體姿態(tài)角和駕駛員操縱的擾動(dòng)更為劇烈。
2)在0°風(fēng)向和55km/h風(fēng)速條件下,計(jì)算軌跡1和3的姿態(tài)角波動(dòng)明顯,同時(shí)駕駛員操縱量幅值偏大。從其駕駛員功率譜圖可以看到,縱向和橫向操縱變化比較劇烈,負(fù)荷較大。對(duì)于該型直升機(jī),進(jìn)行機(jī)艦配合時(shí)的進(jìn)場路線推薦采用左后方45°(軌跡2)進(jìn)艦方式。
3)采用該種基于虛擬駕駛員仿真的非定常尾流對(duì)機(jī)艦動(dòng)態(tài)配合飛行品質(zhì)的影響的研究方法,能夠模擬出駕駛員在非定常尾流場中的工作負(fù)荷,為飛行品質(zhì)研究提供支撐,可進(jìn)一步用于安全使用包線的計(jì)算修正工作。
猜你喜歡
汽車實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車實(shí)用技術(shù)(2022年7期)2022-04-20 11:44:42
汽車實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
活力(2019年22期)2019-03-16 12:46:58
汽車電器(2018年1期)2018-06-05 01:22:54
紅土地(2016年6期)2017-01-15 13:45:55
汽車與安全(2016年5期)2016-12-01 05:22:10
公民與法治(2016年4期)2016-05-17 04:09:26
城市道橋與防洪(2014年7期)2014-02-27 07:28:09
解放軍生活(2013年5期)2013-04-29 21:51:50