一種柔性鉸鏈對鉸接板振動特性影響試驗研究*
2020-09-16 09:10:30邱志成劉金國
空間控制技術與應用 2020年4期
邱志成,劉金國
0 前 言
航天器大型柔性結構,如太陽帆板、空間站柔性機械臂等,采用超輕、超薄的材料,這是為了提高運載工具的效率和降低發射成本,增加有效載荷的重量.太陽翼、天線等附件大多是由鉸鏈將附件部件連接在一起構成的,稱為航天器鉸接結構[1].太陽陣在航天器入軌前呈收攏狀態,入軌后太陽陣壓緊機構釋放和展開機構動作,以實現太陽陣各帆板的展開與鎖定[2].由于運載技術的限制,對展開機構提出了大尺寸和大折疊比的要求,導致機構中含有大量的鉸鏈,在星體進行姿態調整或受到外部擾動時,鉸鏈的摩擦碰撞等非線性特性嚴重影響了可展結構的支撐定位精度和動態穩定性[3].
鉸接柔性結構本質上是分布參數系統,鉸接柔性帶來附加的自由度,鉸鏈引入的非線性因素嚴重影響系統的動力性特性,給太陽電池陣柔性板的建模和分析帶來很大難度.鉸鏈是鉸接結構非線性的重要來源.載荷通過鉸鏈零件之間的接觸、擠壓、摩擦等方式傳遞,使得鉸鏈的載荷與位移關系具有明顯的非線性特點.鉸鏈零件之間的摩擦是鉸接結構中阻尼的重要來源,對鉸接結構的動力學產生重大影響[1].邱雪松等[4]模擬帆板展開過程,分析了多間隙和柔性對帆板質心加速度、鉸鏈間隙碰撞力等參數的影響.吳爽等[5]建立的太陽翼板間鉸鏈非線性動力學模型,構建了板間鉸鏈連接的兩段梁所構成的系統,并對該系統在外界沖擊激勵下進行了振動響應測試,結果表明,建立的鉸鏈動力學模型能夠較好的反映其結構的動力學特性.LI等[6]研究了考慮阻尼、摩擦、重力和柔性的帶間隙展開機構展開和鎖定過程的動態性能的影響,結果表明可展開機構具有明顯的非線性動力學特性.張靜等[3]分析了鉸鏈在不同非線性特性下各參數對結構動態特性的影響,得到結構固有頻率隨鉸鏈間隙、剛度和激振力的變化規律.
另外,WEI等[7]提出了一種多太陽能電池板柔性航天器的動態建模方法,對撓性航天器的動力學響應進行了數值計算.具有剛性關節和柔性關節的撓性航天器系統響應的結果表明,關節柔性對撓性航天器的動力響應有顯著影響,尤其是在關節剛度很小的情況下.BOWDEN等[8]研究表明,鉸鏈阻尼與結構固有頻率之間存在耦合關系.同時,鉸鏈阻尼對鉸接結構彈性振動也起到一定的抑制作用.
關節摩擦是一個需要考慮的重要問題.關節摩擦會影響系統的穩定性和控制精度.現有的大部分關于太陽帆板系統關節摩擦的研究過于簡化為平面問題,導致摩擦力計算結果不準確.LI等[9]介紹了一種三維旋轉關節模型,詳細討論了關節摩擦力的計算.對于彈性機器人,關節中的滯后扭轉是由于內部摩擦、齒隙,和非線性剛度,它們在機械傳動組件內部相互作用[10].非線性關節扭轉會導致滯后空轉,并可能引發與關節相關的控制誤差軌跡跟蹤和定位輸出.摩擦會損害機械系統的動態特性以及手動控制的準確性.LIU等[11]研究了關節摩擦柔性空間機器人的動力學和控制問題,仿真結果表明,關節摩擦對系統響應影響較大,會引起關節響應的振蕩和柔性連桿的振動,導致關節角軌跡誤差并影響系統位置控制的精度.
柔性關節的剛度對系統固有頻率有一定的影響.HU 等[12]提出了一種新型主動關節機構和半主動技術方法,采用關節變剛度控制抑制柔性關節附件的低頻振動;探討了關節剛度對系統固有頻率的影響,數值模擬和實驗結果表明,當關節扭轉剛度發生變化時,會出現頻移現象,系統的固有頻率隨之變化.
綜上所述,對含有柔性鉸鏈的柔性結構的振動檢測和振動控制顯得格外重要.鉸接結構的動力學特性,尤其是其基頻動力學特性,是航天器設計的重要參數.本文的主要工作是建立了一套柔性鉸接板的振動測試系統.采用一種可調扭轉彈簧剛度的柔性鉸鏈和柔性板組成鉸接板系統,采用壓電片作為傳感器/驅動器,激光位移傳感器、數據采集卡和計算機構成測試系統.測試在調整柔性鉸鏈的剛度大小不同時,對柔性鉸接板的振動特性影響,即測試不同鉸鏈剛度時對鉸接板系統第一階模態的固有頻率(振動基頻頻率)、阻尼比的影響.
1 實驗系統介紹
作為微小衛星星箭分離機構和太陽能帆板展開機構的核心部件,鉸鏈通常要求具有展開、鎖緊、防冷焊等功能,同時在基頻、剛度、減振等方面具有良好的性能.沈陽自動化所劉金國研究員等經過反復論證和多次試驗,研制的新型鉸鏈具有安全可靠、結構緊湊、剛度可調、展后自鎖等特點.
這里采用的柔性鉸鏈是一種可旋轉的,扭轉彈簧剛度可調節的,即調節鉸鏈軸和一端的相對位置后,用螺釘固定,這樣由于鉸鏈軸和套之間的初始角位移不同,扭轉彈簧的變形初始角不同,因此鉸鏈的剛度通過這種方式可調節.這種柔性鉸鏈有幾個可調檔位的剛度情況,這里試驗時采用其中兩個檔位,分別為較大和較小剛度.調節不同剛度后,進行外部激勵和壓電驅動器持續激勵,測試振動信號,分析鉸接板系統的固有頻率和阻尼比.
為了測試柔性鉸鏈的不同剛度(通過調節鉸鏈設置)對柔性鉸接板基頻的振動頻率、振動幅值和阻尼特性的影響,建立了帶有柔性鉸鏈的壓電鉸接柔性板實驗裝置,如圖1所示.該柔性鉸接板系統振動檢測和驅動部分包括:壓電陶瓷片傳感器/驅動器,電荷放大器,激光位移傳感器,數據采集卡,端子板,控制計算機,信號發生器,壓電陶瓷驅動放大器.這里柔性鉸鏈由沈陽自動化研究所提供.
在壓電柔性鉸接板的自由端,采用安裝在支架上兩只激光位移傳感器(KEYENCE,LK-500),用于檢測柔性鉸接板末端的兩個角邊的橫向振動位移信號,通過一定的運算可以得到柔性鉸接板低頻彎曲模態振動信息.
壓電柔性鉸接板結構包括兩塊柔性板,其中第一塊柔性板的一端通過夾持裝置與基座連接,另一端通過采用上下兩個邊角分別安裝兩個柔性鉸鏈連接第二塊柔性板的一端,第二塊柔性板的另一端為自由端,柔性鉸接板與水平面垂直,如圖2所示.兩塊柔性板為環氧樹脂材料,幾何尺寸為:厚度均為2 mm,豎直方向尺寸均為510 mm,水平方向第一柔性板的長度為300 mm,第二柔性板長度為560 mm;兩塊柔性板的柔性鉸鏈連接之間的距離為 55 mm.

圖1 兩只激光位移傳感器檢測壓電柔性鉸接板系統照片Fig.1 Photo of piezoelectric flexible hinge plate system detected by two laser displacement sensors
在第一塊柔性板上粘貼壓電陶瓷片,幾何尺寸為50 mm×15 mm×1 mm;分別作為檢測振動的壓電片傳感器和驅動.柔性板寬度方向中線上且靠近根部處安裝1片壓電陶瓷片作為檢測彎曲振動的模態傳感器,另外柔性板每面粘貼4片,姿態角為0°,雙面共粘貼8片壓電陶瓷片組成一路壓電驅動器,接線方式為:兩面并聯連接,且雙面的電路極性相反,構成彎曲模態驅動器,通過壓電放大電路,用于激勵壓電柔性板的彎曲振動.
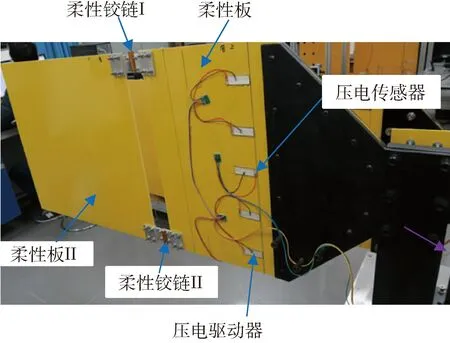
圖2 壓電柔性鉸接板裝置照片Fig.2 Photo of piezoelectric flexible hinge plate device
在進行信號處理時,振動檢測部分的兩種不同傳感器分別將檢測到柔性鉸接板本體的振動信號,通過數據采集卡將測量的模擬電壓信號輸入至計算機,進行頻譜分析得到柔性鉸接板本體全面的振動信息,分析柔性鉸接板在柔性鉸鏈扭轉剛度不同時的振動固有頻率和阻尼比,從而分析得到柔性鉸鏈是如何影響柔性鉸接板的振動響應.
2 外部激勵自由衰減振動測試
外部激勵柔性鉸接板第一階彎曲模態振動,針對柔性鉸鏈剛度較小和較大兩種情況,記錄柔性鉸接板自由衰減的振動信息.將壓電片傳感器檢測的信號經過電荷放大器放大后得到電壓信號;激光位移傳感器的控制器將檢測的位移信號也轉換為對應的電壓信號.把這些檢測的信號經過數據采集卡輸入到計算機后,經過頻譜分析和包絡線分析,得到柔性鉸接板在不同鉸鏈剛度情況下的模態頻率,阻尼比等振動模態參數.從而分析柔性鉸鏈的剛度對柔性鉸接板系統振動的影響.
2.1 鉸鏈剛度較小時自由衰減振動分析
當把柔性鉸鏈的剛度調整到較小時,此時激勵柔性鉸接板的一階彎曲模態振動,然后振動隨著阻尼自由衰減.在這種情況下,由于柔性鉸鏈扭轉彈簧的剛度調整的較小,所以振動響應時,柔性鉸鏈有旋轉角位移產生,柔性鉸鏈產生較大的旋轉角位移,就會在轉動副處有轉動摩擦力矩.這樣,整個柔性鉸接板系統的振動就增加了這部分的阻尼.外部激勵自由衰減振動時,采集壓電傳感片檢測的振動信號和擬合的包絡線如圖3所示.采集激光位移傳感器檢測的振動信號和包絡線如圖4所示.因為都是模擬信號,進行A/D轉換得到電壓信號,所以時域信號曲線縱軸顯示的是電壓(V).擬合的包絡線的方程為:
Y_baoluo(t)=Am×exp(-ξ·ωn·t)
(1)
按式 (1) 的表達式中的參數,圖3所示的包絡線參數分別為:Am=7.5 V為幅值,ξ=0.03為阻尼比,無阻尼固有頻率為ωn=1.05 Hz(小數點后保留兩位有效數字).壓電傳感片檢測的信號傅里葉變換對數坐標圖如圖5所示,壓電傳感片檢測的信號傅里葉變換線性坐標圖如圖6所示.從圖5和圖6可知,第一階彎曲振動的阻尼頻率為ωd=1.05 Hz.畫圖包絡線時,就是結合辨識的參數和時域擬合情況得到.

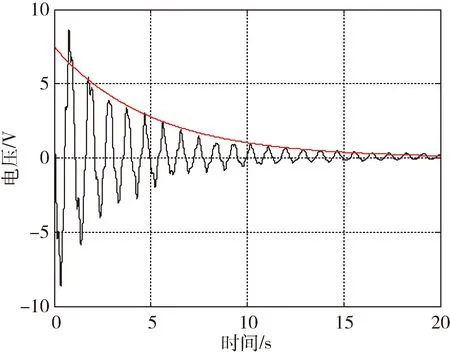
圖3 壓電傳感片檢測的信號及包絡線Fig.3 Signal and envelope detected by piezoelectric sensor
按式 (1)的表達式中的參數,圖4所示的包絡線的相關參數分別為:Am=1.5 V為激光位移傳感器信號檢測振動的幅值,ξ=0.03為阻尼比,ωn=1.05 Hz.激光位移傳感器檢測的信號傅里葉變換對數坐標圖如圖7所示,激光位移傳感器檢測的信號傅里葉變換線性坐標圖如圖8所示.從圖7和圖8可知,第一階彎曲振動的阻尼頻率為ωd=1.05 Hz.這與壓電片傳感器檢測的振動信號的模態頻率一致.
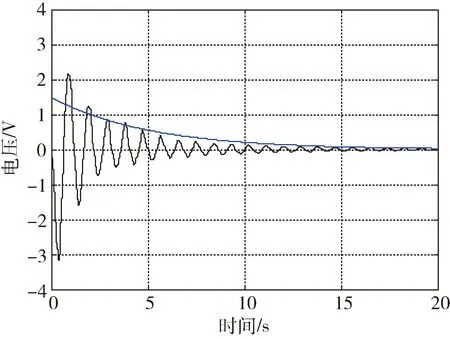
圖4 激光位移傳感器檢測的信號及包絡線Fig.4 Signal and envelope detected by laser displacement sensors
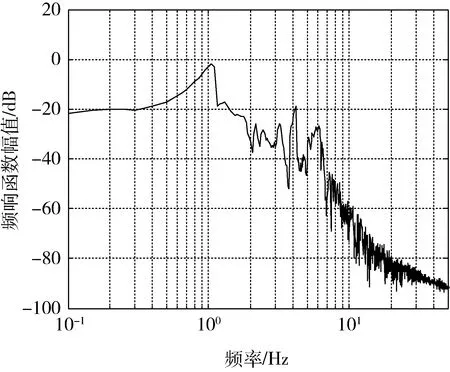
圖5 壓電傳感片檢測的信號傅里葉變換對數坐標圖Fig.5 Fourier transform logarithmic coordinate diagram of signal detected by the piezoelectric sensor
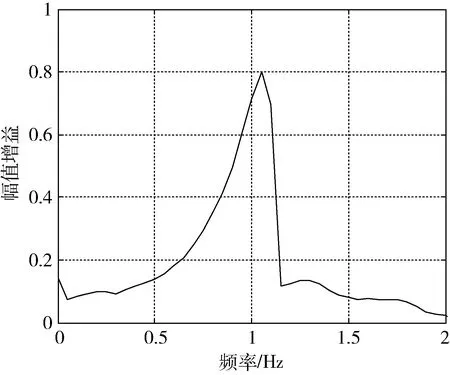
圖6 壓電傳感片檢測的信號傅里葉變換線性坐標圖Fig.6 Fourier transform linear coordinate diagram of signal detected by the piezoelectric sensor
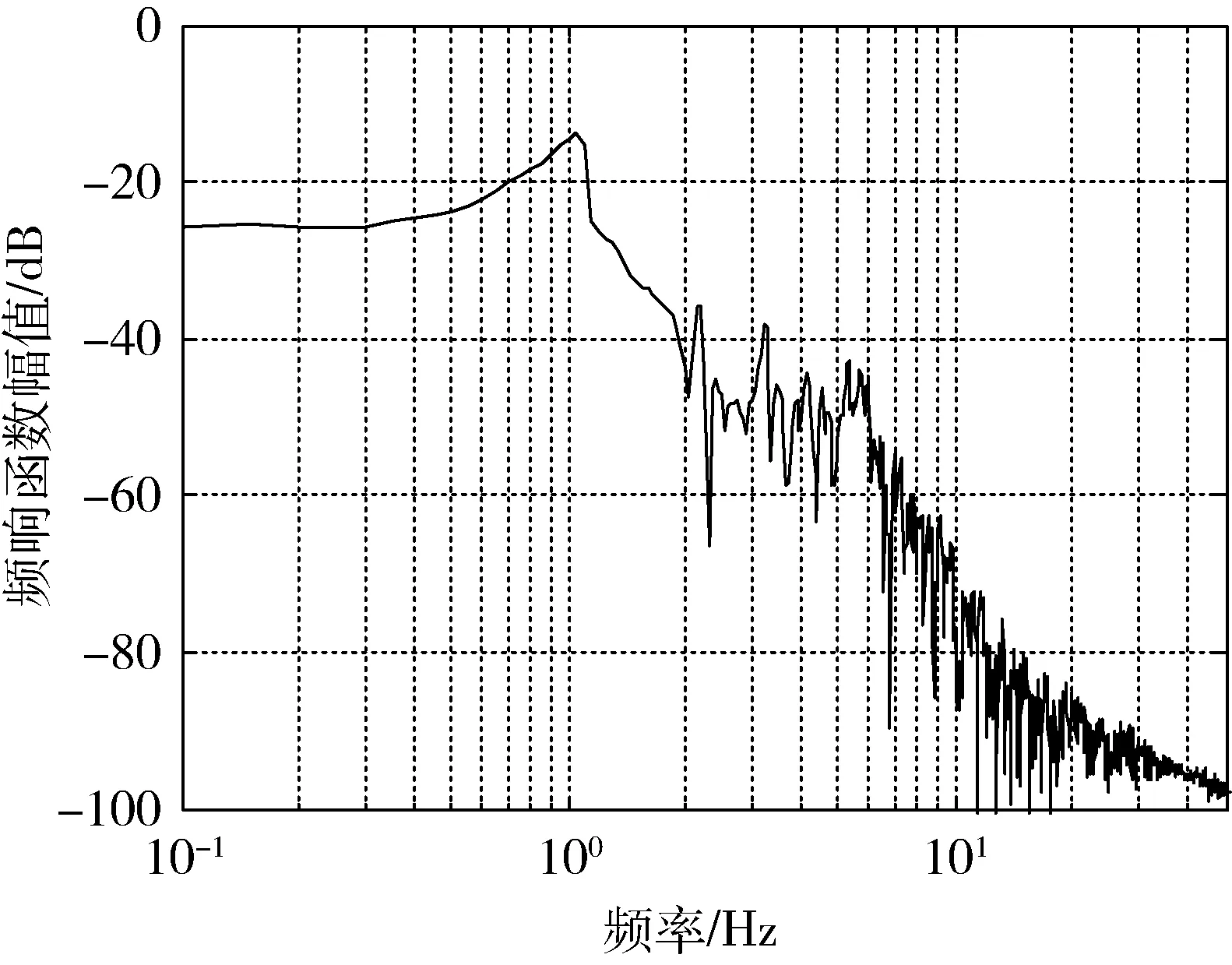
圖7 激光位移傳感器檢測信號傅里葉變換對數坐標圖Fig.7 Fourier transform logarithmic coordinate diagram of detection signal of laser displacement sensors
當柔性鉸鏈剛度較小時,柔性鉸鏈在外部激勵時候會產生彈性旋轉角位移.從圖3和圖4可知,第一個振動周期的幅值要大于包絡線,從第二個周期后滿足指數的衰減包絡線關系.原因是第一個振動周期的大幅值振動衰減到第二個周期的小幅值振動這個過程,由于鉸鏈產生角位移,鉸鏈的轉動摩擦力矩非線性因素使得鉸接板在大幅值振動時消耗的能量較大,所以,大幅值振動很快衰減到較小幅值.柔性鉸鏈的轉動摩擦力矩消耗較大的能量,這個過程的振動能量衰減是非線性的.因此,對于大幅值的振動情況,包絡線比大幅值振動的幅值小.

圖8 激光位移傳感器檢測信號傅里葉變換線性坐標圖Fig.8 Fourier transform linear coordinate diagram of detection signal of laser displacement sensors
當振動幅值較小時,鉸鏈的相對旋轉角位移就很小了,所以,主要體現出來的是柔性鉸接板的彈性振動和較小的柔性鉸鏈轉動位移的摩擦力矩消耗能量.另外,由于較小幅值振動鉸鏈的摩擦力矩和轉角較小,消耗的較小,此時的摩擦力矩消耗基本上滿足包絡線的衰減規律,加上柔性鉸接板的柔性板部分結構阻尼和振動時空氣阻尼起作用,所以在小幅值振動時滿足包絡線的包絡關系.當然,從圖3和圖4的包絡關系看,并不是所有的振動幅值都嚴格滿足包絡線的關系,這主要是因為鉸鏈的旋轉摩擦力矩阻尼是非線性的關系引起的.
另外,激光位移傳感器檢測的振動幅值在第一個振動周期比包絡線大得多,這個除了上述原因外,還有的原因是由于有一部分鉸鏈產生的旋轉角位移,導致柔性鉸接板端部除了彈性變形產生的振動信號外,還有由于鉸鏈的旋轉角位移產生的剛體旋轉部分的振動位移.
2.2 鉸鏈剛度較大時自由衰減振動響應分析
當柔性鉸鏈的剛度調整到較大時,外部激勵自由衰減振動時,采集壓電傳感片檢測的振動信號和擬合的包絡線如圖9所示.采集激光位移傳感器檢測的振動信號和包絡線如圖10所示.

圖9 壓電傳感片檢測的信號及包絡線Fig.9 Signal and envelope detected by the piezoelectric sensor
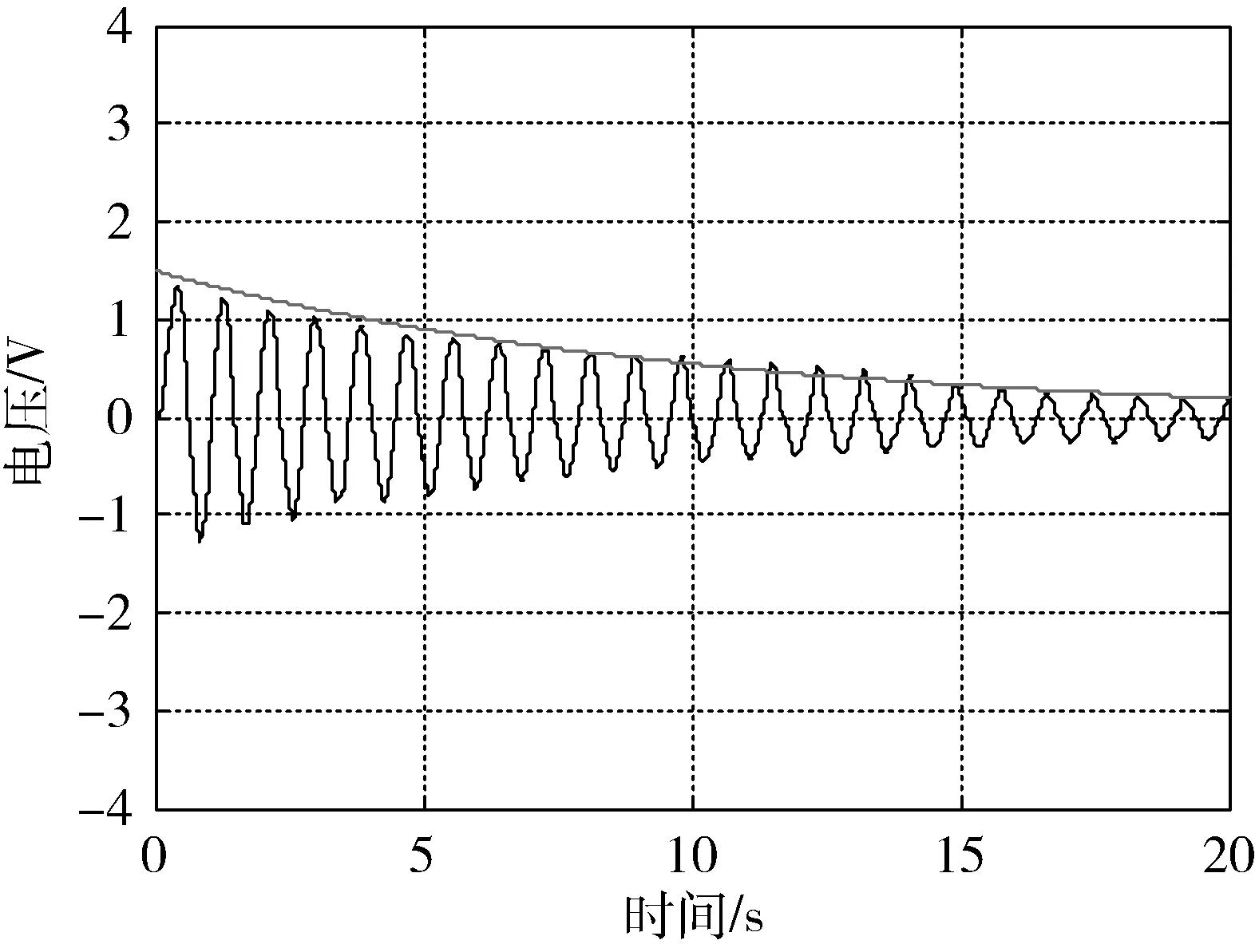
圖10 激光位移傳感器檢測的信號及包絡線Fig.10 Signal and envelope detected by laser displacement sensors
壓電傳感片檢測的信號傅里葉變換對數坐標圖如圖11所示,壓電傳感片檢測的信號傅里葉變換線性坐標圖如圖12所示.從圖11和圖12可知,第一階彎曲振動的阻尼頻率為ωd=1.15 Hz.激光位移傳感器檢測的信號傅里葉變換對數坐標圖如圖13所示,激光位移傳感器檢測的信號傅里葉變換線性坐標圖如圖14所示.從圖13和圖14可知,第一階彎曲振動的阻尼頻率為ωd=1.15 Hz.這與壓電片傳感器檢測的振動信號的模態頻率一致.畫圖包絡線時,就是結合辨識的參數和時域擬合情況得到.
由于此時柔性鉸鏈的剛度調整到較大,所以,當激勵一階彎曲模態振動時,柔性鉸鏈產生的旋轉角位移相對剛度調整較小時要小得多.因此,柔性鉸鏈剛度較大時,柔性鉸接板的振動阻尼消耗主要是柔性板部分的結構阻尼和振動時空氣阻尼起作用,所以在這種情況下,從圖9和圖10可知,較大幅值和較小幅值自由衰減振動時都基本上滿足類似鉸鏈不發生角位移情況下包絡線的包絡關系,此時相當于柔性鉸鏈鎖定.
圖9和圖10所示的自由振動衰減的時間相比圖3和圖4所示衰減時間長得多,原因主要是柔性鉸鏈剛度較大時,柔性鉸鏈的角位移很小甚至不產生角位移.因此,柔性鉸鏈的轉動摩擦消耗能量的情況要比柔性鉸鏈剛度較小時小得多,因此,柔性鉸鏈剛度較大時,自由衰減時間持續較長,尤其是大幅值自由衰減振動.
從圖9和圖10所示的自由振動衰減曲線可知,大幅值振動時,振動幅值比包絡線略小,這主要是大幅值振動的速度加大,空氣阻尼較大,所以大幅值總的阻尼比大,因此,大幅值振動的振幅比包絡線略小.隨著振動幅值的減小空氣阻尼也減小,這時候基本上空氣阻尼就影響差不多一致了.從擬合包絡線的阻尼比看,當柔性鉸鏈剛度較小時,阻尼比為ξ=0.03,當柔性鉸鏈剛度調節的較大時,阻尼比為ξ=0.014.從中可以得出結論,較小剛度時柔性鉸鏈容易在激勵自由振動時產生較大的旋轉角,摩擦力矩消耗較大的能量,導致阻尼比增大.

圖11 壓電傳感片檢測的信號傅里葉變換對數坐標圖Fig.11 Fourier transform logarithmic coordinate diagram of signal detected by the piezoelectric sensor

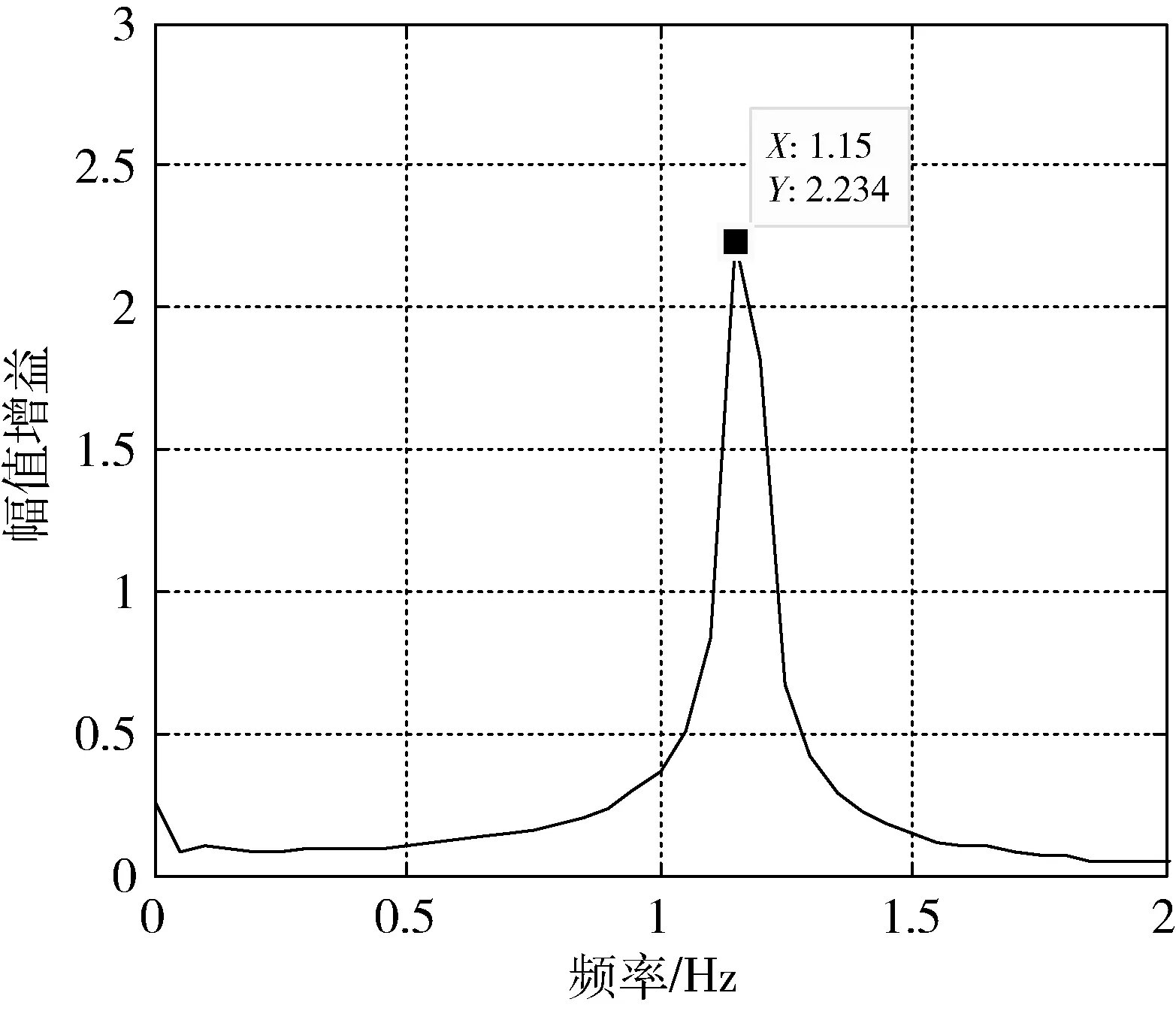
圖12 壓電傳感片檢測的信號傅里葉變換線性坐標圖Fig.12 Fourier transform linear coordinate diagram of signal detected by the piezoelectric sensor

圖13 激光位移傳感器檢測信號傅里葉變換對數坐標圖Fig.13 Fourier transform logarithmic coordinate diagram of detection signal of laser displacement sensors
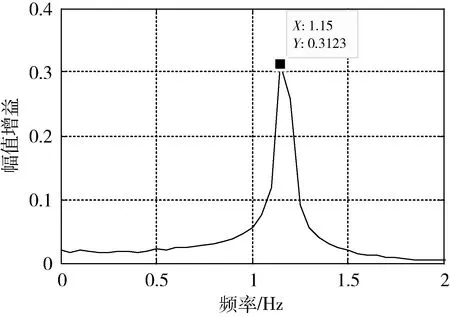
圖14 激光位移傳感器檢測信號傅里葉變換線性坐標圖Fig.14 Fourier transform linear coordinate diagram of detection signal of laser displacement sensors
從柔性鉸接板自由振動測試的阻尼比,固有頻率和柔性鉸鏈剛度關系的分析可知.柔性鉸鏈的扭轉剛度大小,影響整個系統的基頻彎曲振動模態的固有頻率和阻尼比的大小,鉸鏈的剛度大小影響鉸接板系統整體剛度大小,阻尼比與柔性鉸鏈的轉動非線性摩擦力矩消耗阻尼有關.
3 持續激勵振動響應測試
用粘貼在柔性鉸接板上的壓電驅動器激勵柔性鉸接板的第一階彎曲模態以較為恒定的幅值振動.激勵的方法是:按照前面第一階彎曲模態自由衰減振動測試得到的固有頻率,分別采用鉸鏈剛度較小和鉸鏈剛度較大兩種情況的固有頻率.將信號發生器產生一定幅值的正弦信號,信號頻率可調節.將信號發生器產生的正弦電壓信號,經過壓電陶瓷驅動放大器放大后,激勵柔性鉸接板的振動,當振動達到穩定的幅值后,開始記錄采集到的壓電片傳感器的信號和激光位移傳感器的信號.
3.1鉸鏈剛度較小時持續激勵振動響應分析
當柔性鉸鏈的剛度為前面第2.1節較小剛度的情況,調節信號發生器產生正弦信號,幅值適度(幅值在試驗過程中調節,從測試響應信號的幅值情況來看),調節信號發射器產生正弦信號的頻率,直到驅動柔性鉸接板產生等幅值振動后.記錄壓電片傳感器檢測的持續激勵振動信號如圖15所示,記錄激光位移傳感器檢測的持續激勵信號如圖16所示,記錄20 s的時間.激光位移傳感器檢測的信號傅里葉變換對數坐標圖如圖17所示,激光位移傳感器檢測的信號傅里葉變換線性坐標如圖18所示.
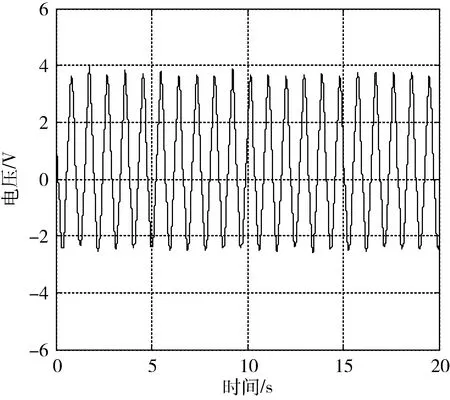
圖15 壓電傳感片檢測的持續激振信號Fig.15 Continuous excitation signal detected by the piezoelectric sensor
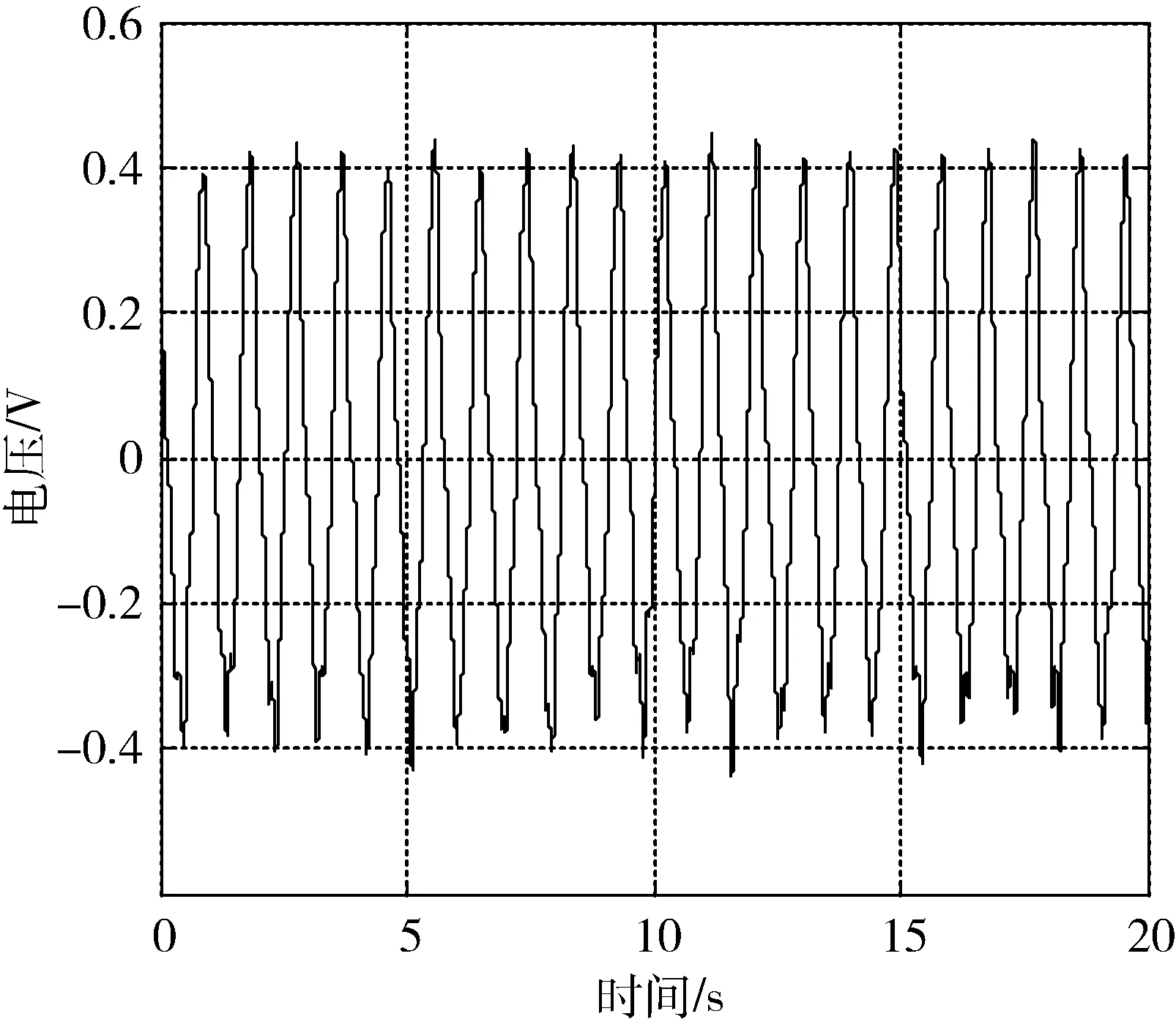
圖16 激光位移傳感器檢測的持續激振信號Fig.16 Continuous excitation signal detected by laser displacement sensors
從壓電傳感器檢測的信號來看,往一邊偏離零值,這除了電荷放大器零漂外,還因為鉸接板形狀不是理想平面,在重力作用下有些扭曲,往一邊有初始應變產生,所以在試驗中壓電傳感器的信號也往一邊偏移,有一個直流分量.而激光位移傳感器的信號對稱性相對較好,因為它用來檢測的是位移信號,并且調試零點.由于我們這里研究柔性鉸鏈對柔性板的特性影響,主要是振動頻率,阻尼比等動態特性,直流分量對動態特性沒有影響;因此沒有采用高通濾波器處理.如果以后在研究振動抑制時,采用高通濾波器處理,信號偏移問題就會解決.在設計控制器驅動控制時,經高通濾波器處理后,直流分別就會濾除,就可用于反饋信號.從圖17和圖18可知,當柔性鉸鏈的剛度較小時,持續激勵振動的固有頻率為ωn=1.05 Hz.這與前面第2.1節自由衰減振動的分析相一致.
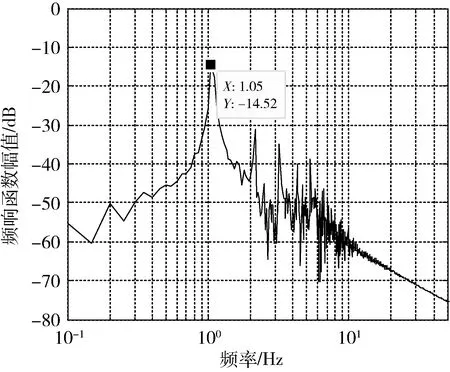
圖17 激光位移傳感器檢測的信號傅里葉變換對數坐標圖Fig.17 Fourier transform logarithmic coordinate diagram of signal detected by laser displacement sensors
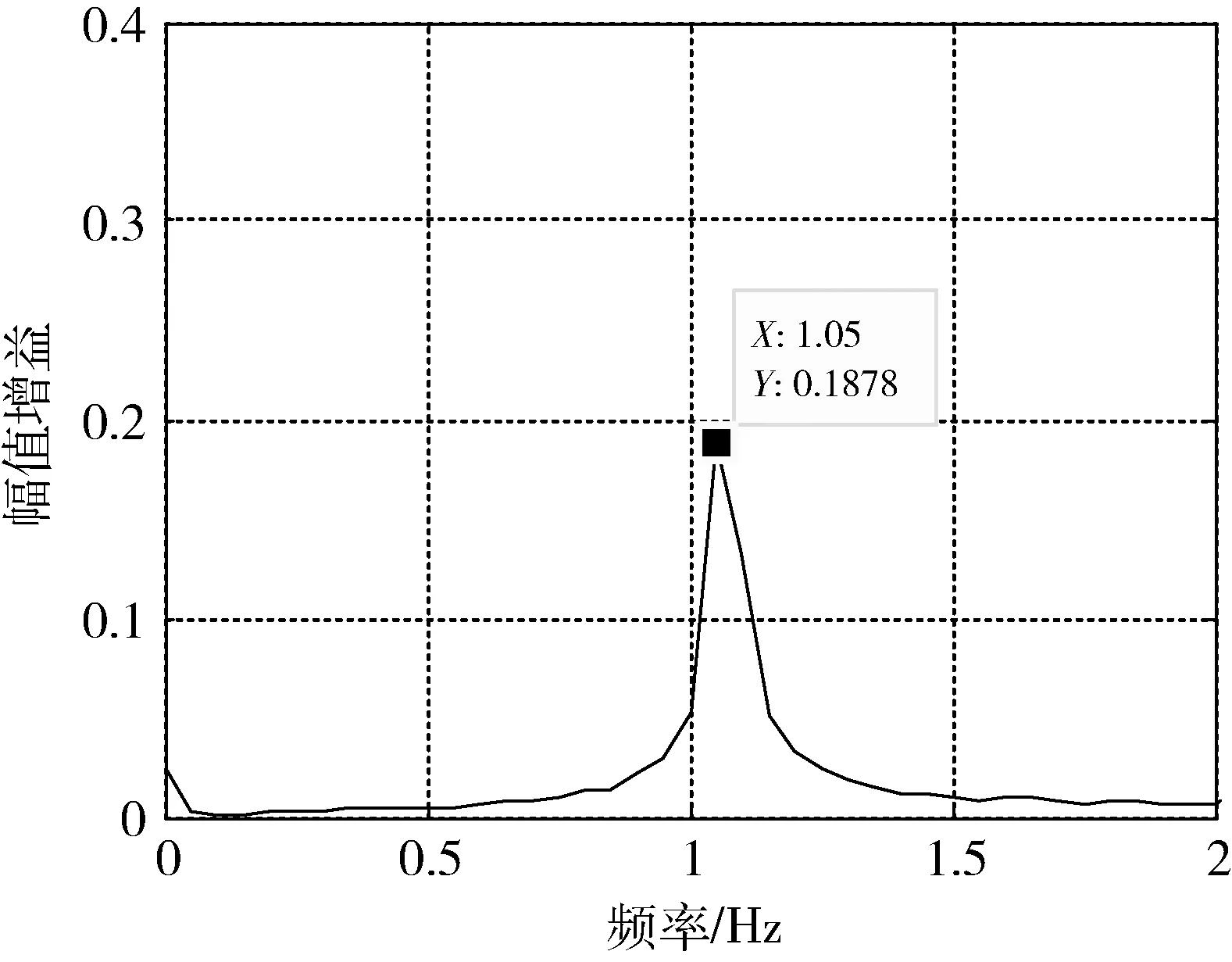
圖18 激光位移傳感器檢測的信號傅里葉變換線性坐標圖Fig.18 Fourier transform linear coordinate diagram of signal detected by laser displacement sensor
3.2 鉸鏈剛度較大時持續激勵振動響應分析
當柔性鉸鏈的剛度為前面第2.2節較大剛度的情況時,調節信號發生器產生正弦信號,信號幅值與第3.1節一致,此時調節信號發射器產生正弦信號的頻率,直到驅動柔性鉸接板產生等幅值振動后.
記錄壓電片傳感器檢測的持續激勵振動信號如圖19所示,記錄激光位移傳感器檢測的持續激勵信號如圖20所示,記錄20 s的時間.激光位移傳感器檢測的信號傅里葉變換對數坐標圖如圖21所示,激光位移傳感器檢測的信號傅里葉變換線性坐標如圖22所示.這些傅里葉變換都是把記錄二十秒的時間域信號進行變換.

圖19 壓電傳感片檢測的持續激振信號Fig.19 Continuous excitation signal detected by the piezoelectric sensor
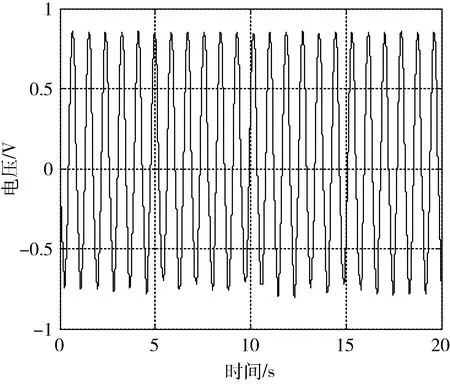
圖20 激光位移傳感器檢測的持續激振信號Fig.20 Continuous excitation signal detected by laser displacement sensors
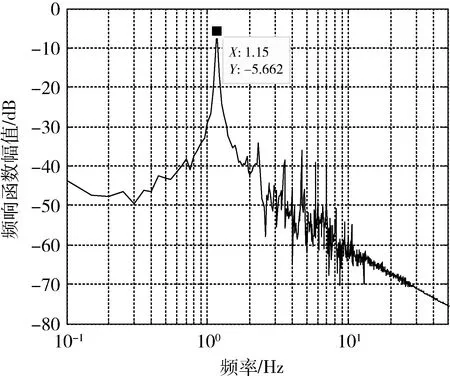
圖21 激光位移傳感器檢測的信號傅里葉變換對數坐標圖Fig.21 Fourier transform logarithmic coordinate diagram of signal detected by laser displacement sensors
從圖21和圖22可知,當柔性鉸鏈的剛度較大時,持續激勵振動的固有頻率為ωn=1.15 Hz.這與前面第2.2節自由衰減振動的分析相一致.

圖22 激光位移傳感器檢測的信號傅里葉變換線性坐標圖Fig.22 Fourier transform linear coordinate diagram of signal detected by laser displacement sensor
比較時間域曲線圖19和圖15,以及比較圖20和圖16可知,當柔性鉸鏈剛度較大時,在同等幅值的激勵信號(當然頻率不同,這已經在前面給出)產生等幅振動.在同樣的壓電驅動持續激勵第一階完全模態振動情況下,從壓電片傳感器采集的信號分析可知,鉸鏈剛度大的情況的響應振動的幅值是鉸鏈剛度小情況時間域的振動幅值大約2倍;激光位移傳感器檢測的兩種情況時間域的振動幅值大約也是2.0倍,這說明,當柔性鉸鏈的剛度較低時,持續激勵振動的柔性鉸鏈可能會產生一個較大一點的微小的旋轉位移,但這個微小的角位移變化,在壓電驅動器持續激勵振動時,傳感器測量中基本上沒有反應.但對于消耗能量來說,這個柔性鉸鏈微小角位移就會對消耗阻尼產生一定的作用.當柔性鉸鏈的剛度較大時,柔性鉸鏈剛度較大的持續激勵振動幅值大,這就是因為當柔性鉸鏈調整到剛度較大時,相對旋轉微小角位移就小,所以鉸鏈的摩擦阻尼消耗的小.因此,激勵振動的幅值就相對大.
同樣,比較圖21和圖17,以及比較圖22和圖18,可知縱坐標幅值的數值也是當柔性鉸鏈剛度大的時候,振動的幅值大.這與前面分析的一致.但是,由于在兩種柔性鉸鏈剛度情況下,柔性鉸接板的第一階彎曲振動模態的頻率不同,所以,對數坐標圖的響應在頻率域中的振動幅值倍數關系和時間域中略有不同.
4 結 論
從測試的試驗結果可知,這里研究的鉸鏈剛度可調的柔性鉸接板系統,當柔性鉸鏈的剛度調節到較大時,柔性鉸接板系統的自由衰減振動的頻率相對較大.這說明,柔性鉸接板的模態固有頻率隨著鉸鏈剛度的變化而發生變化.并且,當柔性鉸鏈的剛度較小時,由于激勵振動的過程中,鉸鏈的轉動副會產生微小角位移,這樣,轉動副的摩擦力矩會產生,使得柔性鉸接板的阻尼比變大,這說明,柔性鉸鏈之間旋轉的摩擦力矩引起能量消耗.從試驗測試分析可知,柔性鉸鏈的剛度影響柔性鉸接板的振動頻率和阻尼比.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
海峽科技與產業(2016年3期)2016-05-17 04:32:12