基于機器人視覺識別的防震錘智能運維研究
2020-09-18 05:03:10蔡曉斌劉榮海楊發(fā)鄭欣郭新良楊迎春虞鴻江
云南電力技術(shù) 2020年4期
蔡曉斌,劉榮海,楊發(fā),鄭欣,郭新良,楊迎春,虞鴻江
(云南電網(wǎng)有限責任公司電力科學研究院,昆明 650217)
0 前言
在高壓輸電線路上,為減輕線路因風力作用而產(chǎn)生的振動,在靠近絕緣子兩側(cè)的線路上會安裝一定數(shù)量的防震錘。但由于輸電線路長期暴露在室外環(huán)境下,受到光照、雨水等氣象條件的影響,防震錘會逐漸受損、甚至失效,而防震錘螺栓松動是導致防震錘失效的主要原因之一。為完成對防震錘螺栓檢修,傳統(tǒng)方法要求工作人員攀登上桿塔逐個對防震錘完成檢修,這種方法勞動強度大、效率低,并且由于高壓輸電線路有很多架設在人煙稀少的地區(qū),環(huán)境較為惡劣[1-2]。隨著智能電網(wǎng)建設的逐步推進,國內(nèi)許多科研單位都開始研制在架空線路上工作的帶電作業(yè)機器人。1999 年,山東電力研究院、山東魯能智能技術(shù)公司和濟寧電業(yè)局合作研制了我國首臺帶電作業(yè)機器人[3],該機器人需要借助于車載平臺,不利于在復雜環(huán)境下使用。2006 年,武漢大學設計了一款具有越障功能的擺臂式兩臂帶電作業(yè)機器人[4],該機器人通過兩個行走臂直接與輸電線路接觸實現(xiàn)遠程巡檢功能。
防震錘和螺栓的識別以及螺栓中心點的提取是帶電作業(yè)機器人完成防震錘檢修工作的兩個重要步驟,長沙理工大學的研究團隊[5]提出使用卷積神經(jīng)元網(wǎng)絡對架空線路上的物體進行識別,該方法識別準確率高但訓練時需要大量的較為準確圖片訓練集和較多的計算資源,這使得該識別模型更新較為困難,不利于實際運用。以下首先分析了帶電作業(yè)機器人與螺栓緊固裝置的結(jié)構(gòu)需求,基于帶電作業(yè)機器人在作業(yè)時所要識別的物體種類較少、背景較為單一的特點,采用支持向量機方法實現(xiàn)防震錘和螺栓的識別。支持向量機是一種借助于核函數(shù)解決非線性分類問題的機器學習方法,由Vapnik[6]提出。對于螺栓中心點的提取,本文分別采用了Hough 變換法和中心矩法進行了對比實驗,實驗結(jié)果表明Hough 變換法更適合于帶電作業(yè)機器人使用。
1 帶電作業(yè)機器人螺栓緊固
帶電作業(yè)機器人需在高壓輸電線路上完成越障、防振錘螺栓緊固任務,其機械結(jié)構(gòu)應滿足以下要求:
1)當輸電線路受風力的影響出現(xiàn)晃動時,帶電作業(yè)機器人應能夠在線路上平穩(wěn)運行;
2)機器人本體機械機構(gòu)應盡量緊湊以滿足在不同線路上運行需求;
3)機器人的行走機構(gòu)滿足一定的爬坡需求;
4)機械臂的運動應避免與導線直接相碰,并且應保證不使機器人重心偏移量過大而導致失衡;
5)螺栓緊固檢修臂的套筒應能夠更換以適應不同型號的螺栓。
2 防震錘與螺栓識別
帶電作業(yè)機器人在巡檢過程中,安裝在機器人上的攝像頭會實時捕捉輸電線路上的物體,此時需要機器人實時完成對所采集到的圖像中的目標進行識別。關(guān)于圖像識別,在機器視覺中有許多方法。傳統(tǒng)的圖像識別方法,如基于灰度的匹配方法、基于特征的匹配方法等,其對圖像質(zhì)量要求較高,且魯棒性較差,不適合用于工作在戶外高空環(huán)境下的帶電作業(yè)機器人[5]。本文采用支持向量機(SVM)算法對所采集的防震錘和螺栓圖片進行識別,SVM 是一種新的機器學習算法。相較于經(jīng)典的神經(jīng)元網(wǎng)絡模型,由于機器人所拍攝的圖片背景為天空,較為單一,SVM 算法所需的訓練樣本更少,模型訓練耗時小,識別效率高,更適合于帶電作業(yè)機器人[7]。
2.1 支持向量機原理
在求解非線性問題時,支持向量機可以在高維空間中將非線性問題轉(zhuǎn)化為線性問題,并采用核函數(shù)來代替高維空間中復雜內(nèi)積的計算。SVM 作為一種通用的機器學習方法,最初被用來解決分類問題。SVM 的核心思想可以概括為兩點:
1)在線性不可分的情況下,SVM 利用非線性映射將低維空間中的樣本映射到高維空間,使之在高維空間中線性可分。
2)基于結(jié)構(gòu)風險最小化理論,SVM 在高維特征空間中構(gòu)造最優(yōu)分類超平面,得到分類器的全局最優(yōu)解。
分類問題通常可以描述為將幾個不同元素的正確分離過程,一般可以歸結(jié)為二分類問題,如圖1 所示,圓和星代表兩類不同的元素,通過畫一條直線來將這兩類元素分離,這是一個典型的二分類問題。
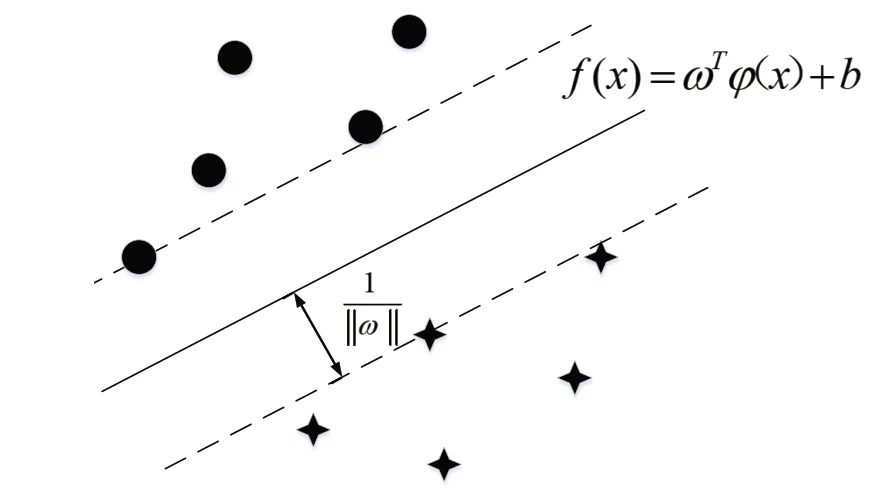
圖1 二分類問題
如果用SVM 思想來對圖1 中的兩類元素進行分類,可將分類邊界表示為:

式中,ω 和b 是函數(shù)的回歸參數(shù)向量,φ(x)是一個非線性函數(shù),它將向量x 映射到一個高維特征空間。
在空間中可以有無數(shù)條分類邊界f(x) 將這兩類元素分離,SVM 分類器的目的就是尋找一個最優(yōu)的分類曲面f(x),使它不僅能正確地劃分這兩類元素,而且能最大化這兩類元素之間的分類間隔,使D 最大。式(1)中參數(shù)ω 和b可通過最小化以下正則風險函數(shù)來估計。
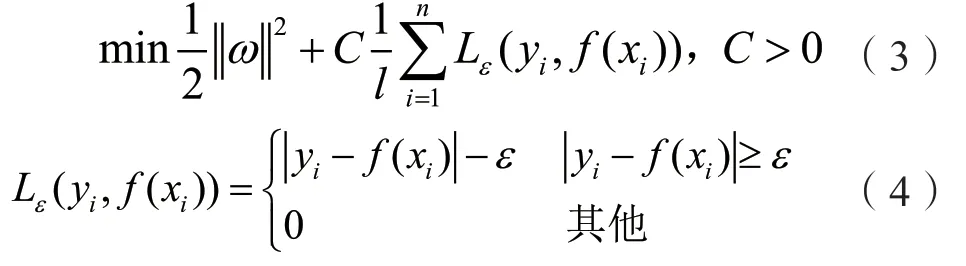
式(3)中,||ω||2稱為正則項,通過最小化||ω||2將使最優(yōu)分類平面盡可能平坦,從而起到控制函數(shù)容量的作用。稱為經(jīng)驗誤差,由不敏感損失函數(shù)Lε(yi,f(xi)) 確定,不敏感損失函數(shù)使得SVM 算法將允許分類點到最優(yōu)分類平面存在最大ε的誤差。C為正則化系數(shù)。
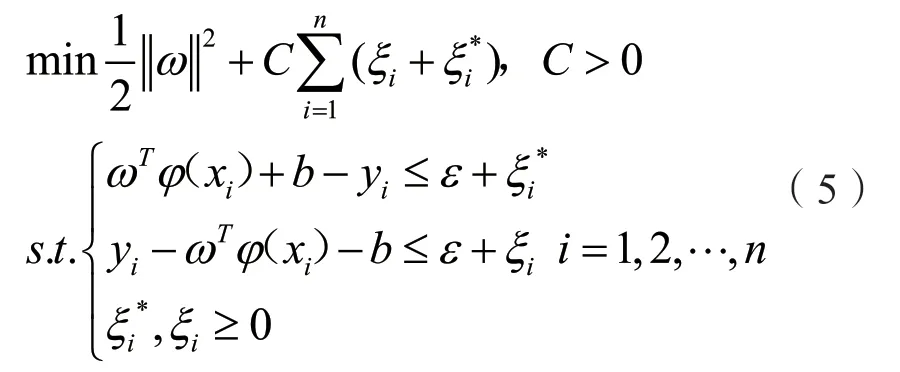
為了使該方法魯棒性更好并解決上述優(yōu)化問題中的一些少量不可行約束,引入松弛變量ξ*i和ξi,將式(3)改寫為:
通過引入拉格朗日乘子并利用最優(yōu)性約束,SVM 函數(shù)(1)可改寫為以下顯式形式:

SVM 算法通常采用核函數(shù)來解決非線性特征空間映射問題。徑向基函數(shù)(Radial Basis Function, RBF)核函數(shù)由于其具有較高的計算效率,是各種核函數(shù)中應用最為廣泛的一種,此外,RBF 核可以將每個樣本點映射到一個無窮維特征空間,使得線性不可分的數(shù)據(jù)線性可分[8]。本文采用RBF 核函數(shù)構(gòu)造SVM 算法。RBF 核函數(shù)如下式所示:

式中,γ為核函數(shù)參數(shù)。
2.2 最優(yōu)參數(shù)搜索
SVM 算法模型和其核函數(shù)中有部分參數(shù)需要人為設置,一般需要研究者們根據(jù)經(jīng)驗設置或通過算法自動尋參,對于這些參數(shù)的設置本文將采用網(wǎng)格法進行遍尋,同時用S 折交叉驗證(S-Folder Cross Validation)的方法找到最佳參數(shù)[9]。具體步驟如下:
1)設定所尋參數(shù)某一初始取值范圍,和搜索步長;
2)將參數(shù)取值范圍按搜索步長進行網(wǎng)格劃分;
3)將某一參數(shù)按網(wǎng)格從大到小將數(shù)值帶入模型,其余參數(shù)不變,利用5 折交叉驗證計算誤差,即將訓練集分為5 份,分別將每一份作為測試樣本其余4 份作為訓練樣本輸入模型進行分類,將分類結(jié)果與測試樣本求誤差,預測5次,將5 次誤差取平均作為這組參數(shù)對應的誤差;
4)若存在兩組參數(shù)所對應的誤差小于1×10-4則選擇其中風險系數(shù)C較小的一組,否則選擇誤差最小的一組對應參數(shù);
5)將另一個參數(shù)按步長減小一次重復步驟(3)和步驟(4)直至所有參數(shù)組合都進行過嘗試最終選擇誤差最小的一組對應參數(shù)。
步驟4)中本文尋找風險系數(shù)C較小的一組參數(shù)理由是,C影響模型的學習精度,C的提高會使模型學習精度提高,但模型的泛化能力變差且運算耗時增加,在測試集的擬合效果會明顯差于訓練集,即過擬合現(xiàn)象。
2.3 圖像識別實驗
和深度學習算法相比,SVM 算法在進行圖片分類時,原始圖像信息需先經(jīng)過特征提取再輸入模型進行訓練或識別,如圖2 所示。本文將采用方向梯度直方圖(Histogram of Gradient,HOG)[10]和灰度共生矩陣(Graylevel Co-occurrence Matrix,GLCM)[11]作為輸入SVM 算法的圖像特征。SVM 算法進行圖像識別流程圖如下所示:

圖2 SVM算法進行圖像識別流程圖
為檢驗本文所構(gòu)建的SVM 算法對架空線路上防震錘與螺栓的識別效果,本文采用防震錘和螺栓實物照片各20 張作為訓練集,再分別采用各20 張作為測試集來測試模型的識別率。同時,為進一步驗證模型的魯棒性,本文在測試集中額外增加了輸電線路上常見的液壓線夾和絕緣子各10 張,最終測試集圖像數(shù)量為60。測試結(jié)果如下表所示:
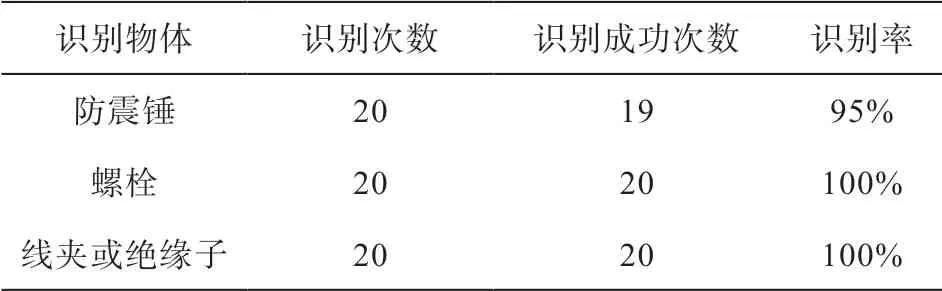
表1 識別測試結(jié)果
帶電作業(yè)機器人在執(zhí)行巡檢任務時,機器人的攝像頭會對輸電線路上的物體進行實時檢測,同一物體將被多次識別,根據(jù)表1 識別測試結(jié)果,本文所構(gòu)建的基于SVM 的識別模型能夠滿足作業(yè)需求。
3 螺栓中心點提取
在機器人執(zhí)行防震錘自主檢修任務時,需要安裝在維修機械臂上的攝像頭設備螺栓并提取中心點。要使螺栓緊固機構(gòu)正確完成任務則要求螺栓中心點提取精度足夠高。為尋找一個合適中心點提取方法,本文將使用中心矩法和Hough 變換法分別對螺栓實物圖像的中心點進行提取實驗,并通過計算提取結(jié)果的標準差來比較兩種方法的效果。
標準差計算公式如下:
式中,xi為計算中心點x 軸或y 軸像素坐標,為xi的平均值。
在對螺栓中心點進行提取之前,需對螺栓灰度圖像進行二值化處理[12],本文采用自適應二值化方法對螺栓灰度圖像進行處理,處理效果如圖3 所示。
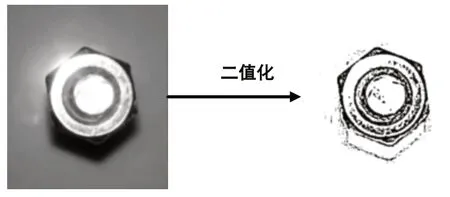
圖3 二值化效果圖
3.1 中心矩法
中心矩法通過計算物體在圖像上的質(zhì)心來確定其中心點。中心矩法具有計算速度快,算法簡單的特點。尤其在光斑光強比較均勻、對稱性好的情況時效果更加突出。但是只能檢測光斑中心、不能檢測半徑。要計算二值化后圖像的質(zhì)心需先計算圖像零階矩m00、一階矩m10、二階矩m01:

式中,當圖像像素點為亮點時g(i, j)=1,當圖像像素點為暗點時g(i, j)=0。
中心位置坐標由下式計算:
3.2 Hough變換法
Hough 變 換 是 由Paul Hough 于1962 年 提出的一種檢測圓的算法,它是一種基于累加器的投票機制用來檢測圓特征的算法,具有精度高,抗干擾能力強等優(yōu)點[13]。它的基本思想是:將原始圖像從原圖像空間變換到參數(shù)空間,并在參數(shù)空間中使用大多數(shù)邊界點都滿足的某種參數(shù)形式作為圖像中的曲線的描述,再通過設置累加器對參數(shù)進行累積,其峰值對應的點就是所需要的信息。
對于一個如式(13)描述的圓,Hough 變換先對原始灰度圖像進行邊緣檢測,理想情況下,對像素空間的一個點(x,y),其在三維參數(shù)空間(a,b,r) 中對應一個圓錐;而像素空間的一個圓就對應著這三維參數(shù)空間中一簇圓錐。這一簇圓錐將相交于一個點,當這個點的三維參數(shù)一定,就能找到其所對于的像素空間中的圓,Hough 變換提取圓心原理如圖4 所示。

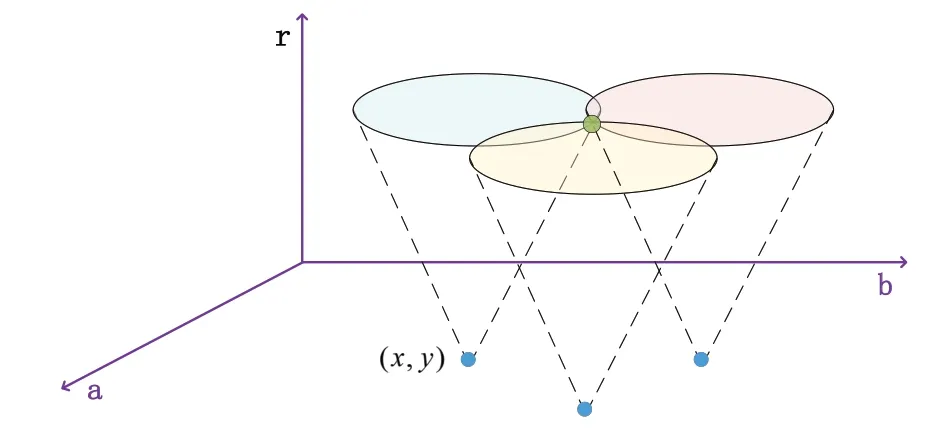
圖4 Hough變換提取圓心原理
3.3 螺栓中心點提取實驗
為了對比中心矩法和Hough 變換法用于提取螺栓中心的效果,本文利用圖3 所示的螺栓圖片進行對比實驗,原始灰度圖片會先經(jīng)過二值化處理,再使用加入均值為0、方差為25 的高斯白噪聲,具體實驗流程如下圖所示:

圖5 實驗流程
中心矩法和Hough 變換法都將進行100 次獨立實驗,最終實驗結(jié)果如下表所示:
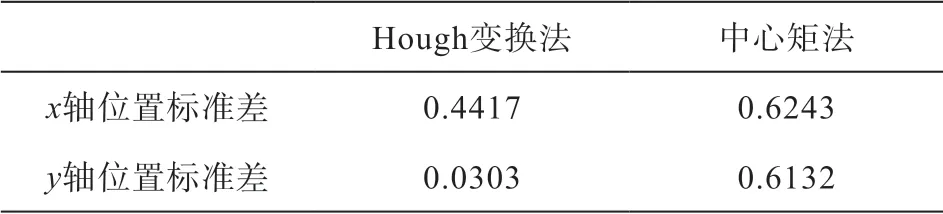
表2 中心點提取實驗結(jié)果
如表2 所示,采用Hough 變換法提取螺栓中心點在x軸和y軸標準差均更小,這說明Hough 變換法對于螺栓中心點的提取更穩(wěn)定。
根據(jù)本文的實驗結(jié)果,Hough 變換法相較于中心矩法更適合于帶電作業(yè)機器人防震錘檢修過程中用于提取螺栓中心位置。且由于螺栓松動,螺栓中心軸與防震錘螺栓安裝表面會存在一定的傾角,這時相機拍攝的螺栓圖像會出現(xiàn)傾斜,此時采用中心矩法求螺栓中心時需對相機角度進行修正,不利于帶電作業(yè)機器人實際操作。
4 結(jié)束語
本文主要研究了帶電作業(yè)機器人在防震錘檢修過程中對防震錘和螺栓的識別,以及螺栓中心點的提取過程。防震錘在抵抗高壓輸電線路因風力作用而產(chǎn)生振動過程中發(fā)揮著重要作用,而螺栓的松動是防震錘失效的主要原因之一。為了能夠高效識別出架空導線上的防震錘與螺栓,本文利用基于徑向基函數(shù)所構(gòu)造支持向量機對所采集的防震錘、螺栓、線夾和絕緣子圖像進行識別實驗,實驗結(jié)果表明,該方法能夠在訓練樣本較少的情況下有效滿足帶電作業(yè)機器人在高壓架空線路環(huán)境下的識別任務。
針對螺栓中心點的提取工作,本文分別利用中心矩法和Hough 變換法進行對比實驗,實驗結(jié)果表明Hough 變換法對于帶電作業(yè)機器人的工作需求是一種更加穩(wěn)定的方法。
本文的部分研究內(nèi)容還未完全深入,需要更進一步的研究工作,如支持向量機核函數(shù)的選取問題和支持向量機及核函數(shù)的參數(shù)尋優(yōu)問題,架空線路帶電作業(yè)機器人所處的工作環(huán)境較為特殊,在這種特殊環(huán)境下的相關(guān)研究有待進一步深入。
