基于預測滑轉率的轉矩分配策略研究*
2020-09-22 01:10:30劉涵李濤聶彥鑫謝寧
汽車技術 2020年9期
劉涵 李濤 聶彥鑫 謝寧
(中國汽車技術研究中心有限公司,天津 300300)
1 前言
輪轂電機驅動系統將中央驅動系統的傳動裝置集成在車輪上,省去了差速器、傳動軸等傳動部件,具有體積小、可控自由度較高、易于布置等優勢,成為純電動汽車驅動系統的發展方向[1-2]。
輪轂電機驅動的電動汽車取消了傳統機械差速器,故需對左、右驅動輪的轉矩進行協調控制,以維持轉向和驅動過程中車輛的穩定性。目前,國內外在該領域的研究主要分為2類:一是基于滑轉率反饋自適應系統進行電子差速控制,如文獻[3]~文獻[7]等對驅動輪反饋的縱向滑轉率進行分析,采用模糊PID 控制、神經網絡控制、滑模變結構控制等自適應控制對驅動輪的輸出轉矩進行自適應調整,但由于行駛路面復雜多變,輸出的轉矩往往根據當前的滑轉率對上一時刻輸出轉矩進行調整,這種控制方法存在部分控制滯后的問題;二是基于路面識別設計的差速系統,如文獻[8]~文獻[10]等通過線性最小二乘法或者邏輯門限的方法對路面特征值進行識別,然后根據最優滑轉率對轉矩進行調整,這種方法能夠根據路面情況得到最優輸出轉矩,在控制過程中有較強的主動性。本文綜合上述研究方案的特點,提出一種基于預測算法對轉矩進行自適應分配的方法,并通過仿真及硬件在環(Hardware-In-the-Loop,HIL)測試對動態轉矩分配系統進行驗證。
2 車輛模型
本文以某小型純電動SUV 樣車為研究基礎,其驅動系統構型如圖1所示。整車由集成在后輪上的2個輪轂電機輸出扭矩驅動,整車參數如表1所示。
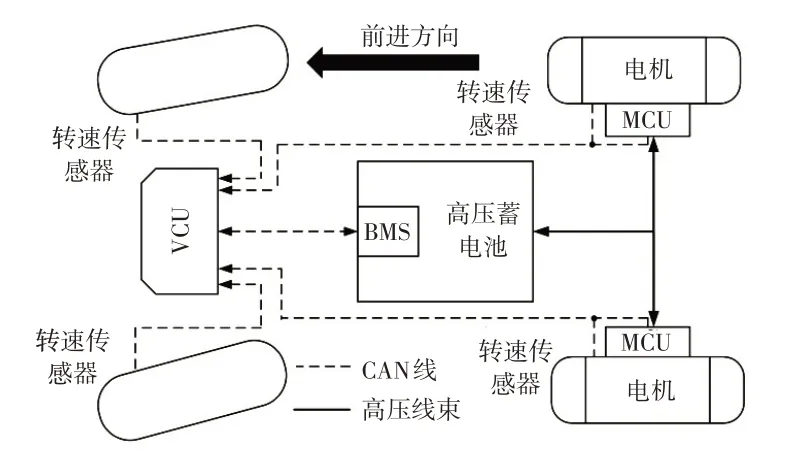
圖1 驅動系統構型
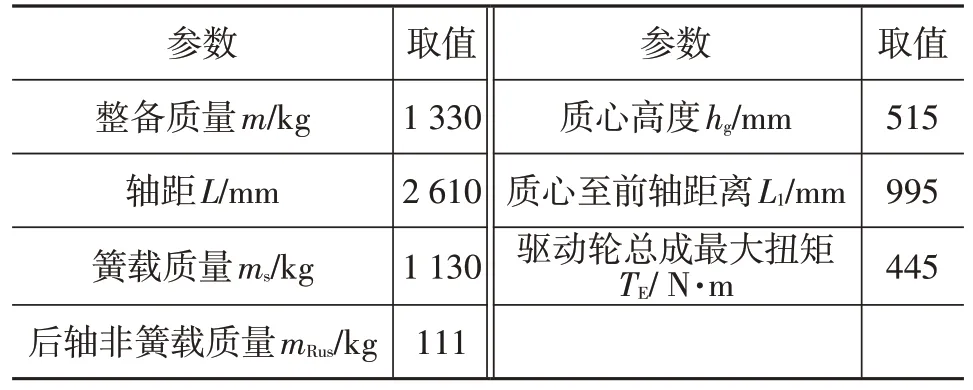
表1 整車參數
控制系統構型如圖2所示,整車控制器(Vehicle Con?trol Unit,VCU)計算電機轉矩輸出值,并通過動力CAN(Powertrain CAN,P-CAN)將需要輸出的信號傳輸至2個驅動電機控制器(Motor Controller Unit,MCU),四輪安裝的轉速傳感器將轉速信號通過CAN總線傳輸至VCU。
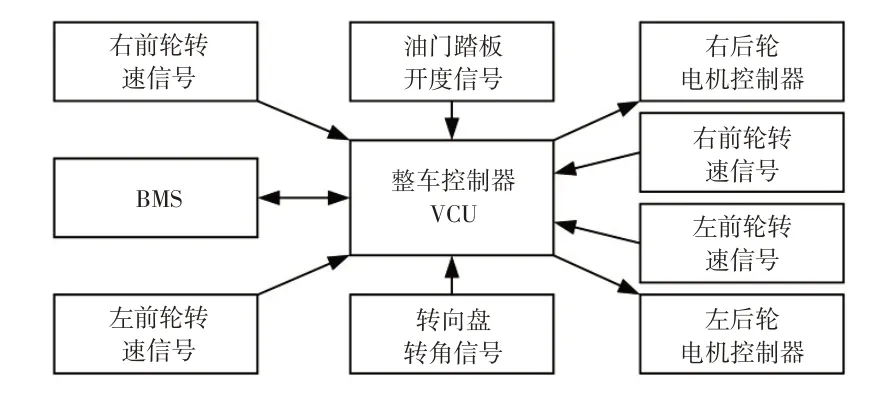
圖2 控制系統構型
在車輛轉向過程中,左、右驅動輪產生載荷差,外側車輪載荷增加,內側車輪載荷減小,且轉向角越大、車速越快時,這種現象越明顯[11]。而當路面情況相同時,載荷越大,可以分配的驅動轉矩越多。因此,本文根據驅動輪載荷的不同進行第一次轉矩計算。
考慮到非簧載質量和路面坡度角的影響,對左、右驅動輪的載荷進行多自由度車輛動力學分析:
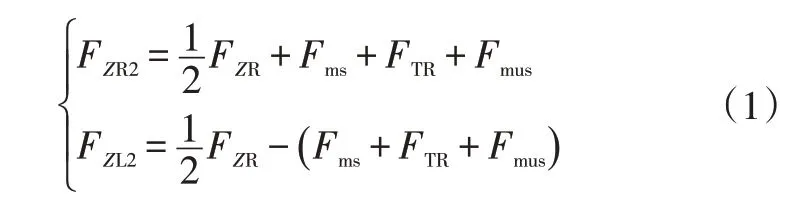
式中,FZL2、FZR2分別為左、右后輪的載荷;FZR為車輛在縱向坡度角為ΦR、橫向坡度角為0的路面上行駛時后軸的負載;Fms為后軸簧載質量在轉向過程中引起的載荷偏移;FTR為轉向過程中懸架產生恢復力矩造成的載荷偏移;Fmus為非簧載質量在轉向過程中產生的載荷偏移。
因為使用輪轂電機代替中央驅動電機后,非簧載質量增加較多,故該部分載荷偏移量必須予以考慮[12],則驅動輪載荷主要分為FZR、Fms、FTR、Fmus4個部分:
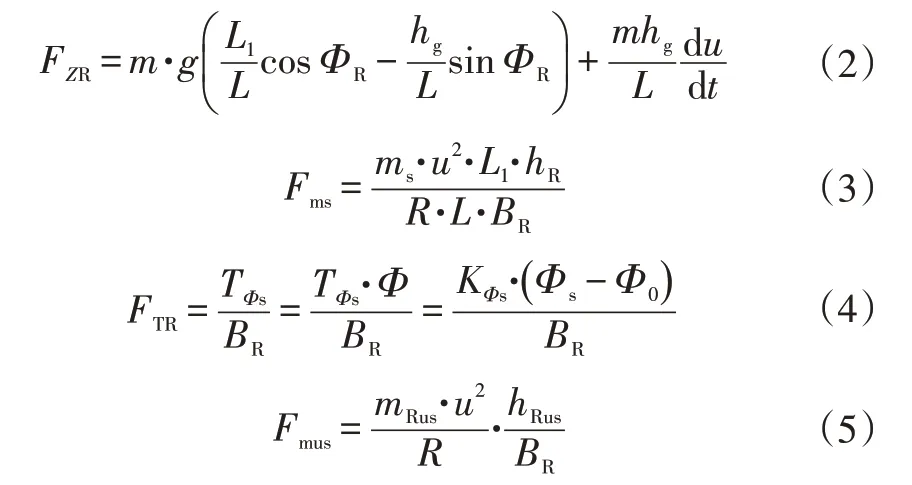
式中,g為重力加速度;u為車輛沿前進方向的行駛速度;hR為后軸承載懸掛質量的質心高度;BR為后輪距;R為當前車輛狀態下的轉向半徑,可由阿克曼轉向模型及轉向盤轉角計算得出;TΦs為側傾力矩;Φ為車輛與水平面之間的側傾夾角;Φs為行駛過程中車身的側傾角;Φ0為路面橫向與水平面之間的夾角;KΦs為車身后懸架的側傾剛度;mRus為后軸非懸掛質量;hRus為后軸非懸掛質量的質心高度,為方便計算,取為后軸驅動輪滾動半徑r。
車輛動力學模型如圖3 所示,其中,MR為質心到地面的垂直距離。

圖3 車輛動力學模型
3 后輪驅動轉矩分配
本文設計的轉矩分配策略如圖4所示,首先根據驅動輪載荷初步分配轉矩,預測的滑轉率經粒子群優化(Particle Swarm Optimization,PSO)算法尋優計算得出左、右后輪輸出轉矩修正參數αL2、αR2,并將其與初步分配的轉矩相結合,得出驅動電機應輸出的最終轉矩,該轉矩信號經P-CAN 輸出至MCU,MCU控制驅動電機進行使能,至此完成整個系統的優化輸出。
3.1 按載荷分配驅動輪轉矩
純電動汽車多采用踏板模擬器代替傳統燃油車的機械式油門踏板。電子油門踏板輸出的電壓為0~5 V[13],只需將該電壓信號KT通過AD 采樣轉換便能計算得出當前油門踏板的開度,利用輸出扭矩擬合曲線可以計算得出駕駛員對動力系統需求的總轉矩TE。
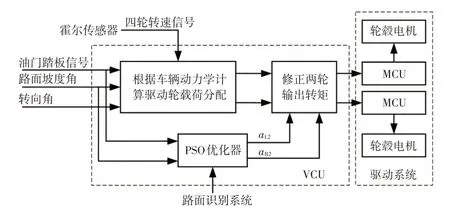
圖4 整車驅動控制示意
車輛轉向時左后輪與右后輪的垂直載荷之比C為:

按驅動輪載荷分配扭矩的結果為:
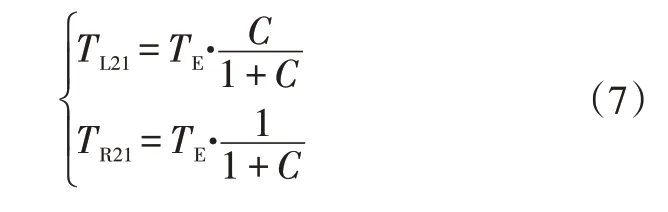
式中,TL21、TR21分別為第一次分配得到的左、右后輪輸出轉矩。
3.2 驅動轉矩修正
后輪驅動轉矩的第一次分配只是根據驅動輪負載按比例分配,以避免負載輕的驅動輪輸出轉矩過大造成車輪滑移率過大。但實際行駛工況下路面情況復雜多變,為充分利用地面附著力,需要確定路面特性修正轉矩的輸出,使車輪運行在最優滑轉率附近,以充分利用地面附著力,提高車輛的經濟性和穩定性[14]。
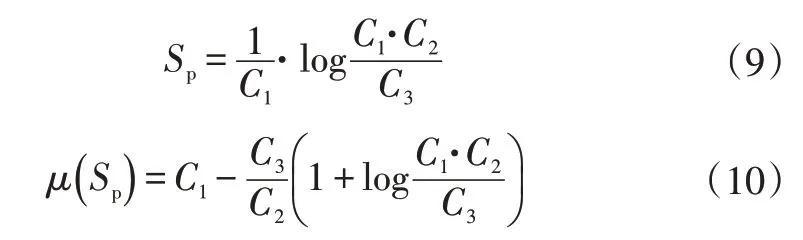
Burckhardt等提出的μ-S曲線可準確描述不同路面下車輪滑轉率S與路面附著系數μ的函數關系[15]:

式中,C1、C2、C3為擬合曲線特征值。
特征路面上的最優滑轉率Sp及最大路面利用附著系數μ(Sp)分別為:
7種常見特征路面的特征值如表2所示[15]。
通過識別驅動輪所接觸路面的附著系數及滑轉率,并根據表2中的Sp及μ(Sp)使用T-S模糊算法識別出當前路面的類型,最后給出最優滑轉率及最大路面利用附著系數。路面觀測系統[8]輸出驅動輪所處路面的最優滑轉率分別為SL2、SR2。
在以往該領域的研究中,多數基于當前滑轉率反饋修正的方法進行控制。因此,本文提出預測滑轉率的方式對轉矩進行修正,以提高該系統的實時性。
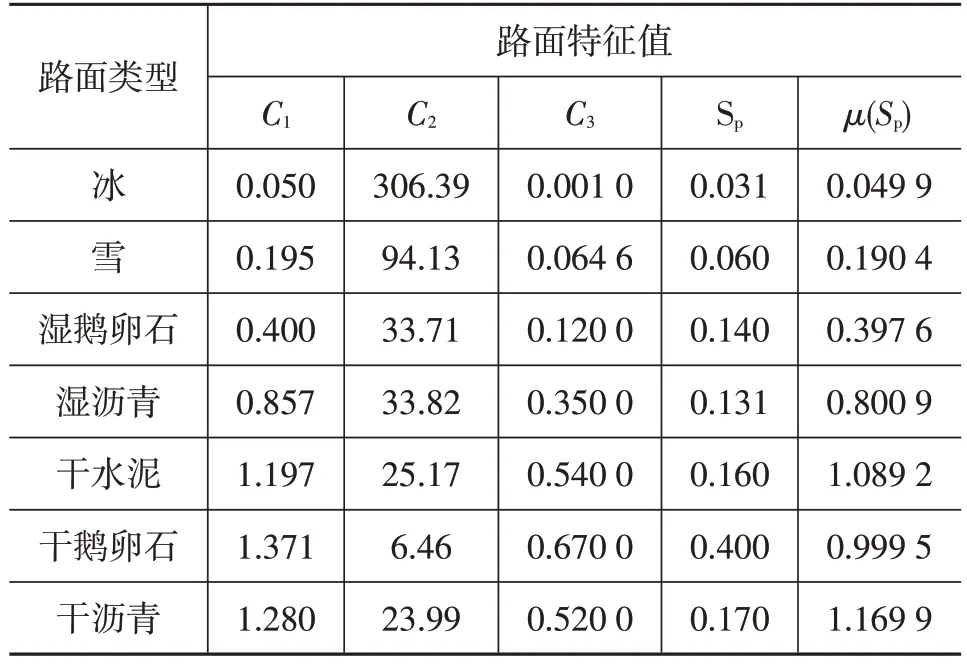
表2 7種路面的擬合曲線特征值
本文根據1/4 車輛動力學模型[16]預測驅動輪滑轉率。以左后驅動輪為例,在左前輪和左后輪處安裝霍爾轉速傳感器,測量左前、左后輪的實時轉速ωL1、ωL2。在驅動行駛過程中,有:

式中,J為驅動車輪總成的轉動慣量;Ff為輪胎的滾動阻力,可通過臺架測試得出;為1/4車輛模型中負載的懸掛質量。
在傳感器采樣周期內輸出轉矩不變的情況下,預測下個采樣點驅動輪的轉速及行駛線速度:

式中,ueL2、ωeL2分別為采集計算的實時速度和轉速。
在采集左后驅動輪行駛線速度時,由于后驅動輪會出現滑轉現象,直接測量計算存在較大誤差,因此,在左前輪安裝轉速傳感器,由實時采集的左前輪轉速ωeL1利用阿克曼轉向模型[17](見圖5)計算得到左后輪在行駛過程中的線速度ueL2:
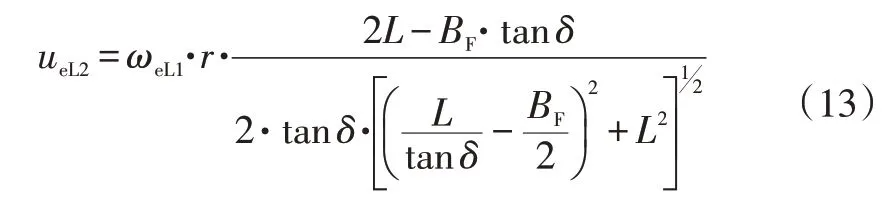
而左后驅動輪的轉速可以通過安裝在車輪制動盤附近的霍爾轉速傳感器直接測量得出。
在積分計算完成后,根據式(13)中的轉速及行駛速度計算預測下一采樣點的驅動輪滑轉率:

同理可得到右側驅動輪的預測滑轉率SR2F。
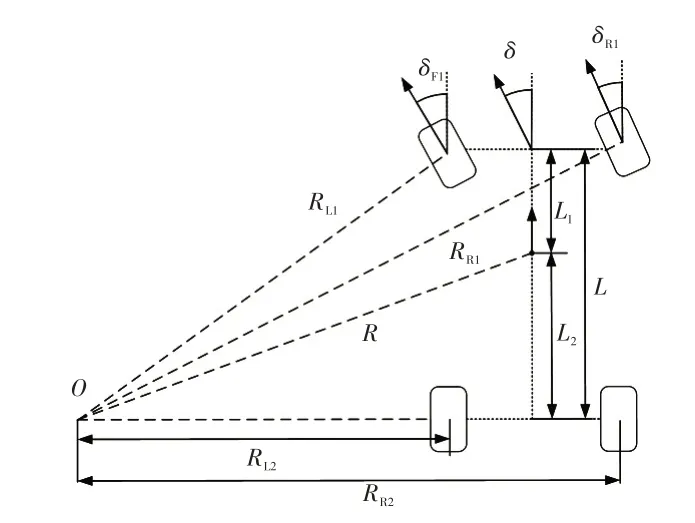
圖5 阿克曼轉向模型
從上述滑轉率的預測過程中可以看出,隨著路面條件的變化,最優輸出轉矩是非線性隨機的優化目標,使用常規固定參數控制器控制時,系統的魯棒性過低。粒子群優化算法憑借其易實現、參數較少、無需解碼編碼等優點,被許多領域的專家學者廣泛采用[18-19],因此,本文選取粒子群優化算法進行自適應尋優計算。
本文采用粒子群優化算法的目標為優化輸出的最優轉矩與下一報文周期輸出的扭矩的比值,即αL2、αR2。為加快搜索速度,并且考慮到驅動防滑控制系統與駕駛員對轉矩需求的主導關系,將粒子群搜索的范圍設置為(0.2≤αL2<1]∪(0.2≤αR2<1]。
粒子群優化算法在尋優起始階段,將粒子隨機分布在整個搜索區間內,每次迭代后,更新每個粒子的搜索方向以及局部、全局搜索到的最優值:
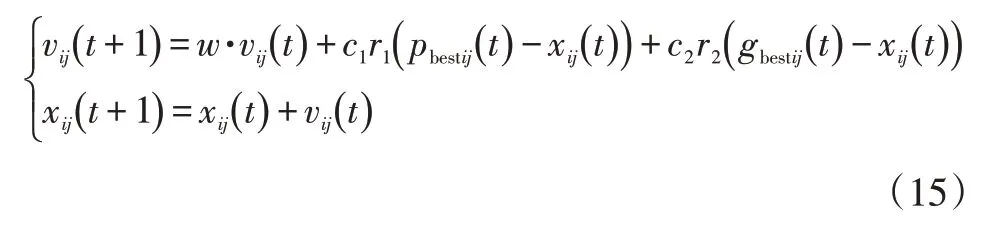
式中,w、c1、c2為固定的權重因子,本文分別設置為0.8、2、2;vij為單個粒子在搜索空間中的速度;pbestij為單體粒子尋優歷史中搜索到的個體最優解;gbestij為全部種群中搜索到的全局最優解;r1、r2為(0,1)范圍內的隨機數。
粒子所在位置的優劣根據適應度函數進行判斷。為了同時優化2個驅動輪的滑轉率,適應度函數選取為2個預測滑轉率與最優滑轉率差值的均方根值:

粒子群優化算法需要計算出滿足最小適應度函數的目標值,并輸出最優的粒子坐標。
經過粒子群優化算法尋優計算,得出2個轉矩調整系數,并計算得出最優輸出轉矩:
考慮到汽車運行的復雜工況,計算得出的驅動電機轉矩可能超過輪轂電機輸出轉矩的上限,因此增加計算扭矩的限制模塊,即計算得出的扭矩超過輪轂電機的最大轉矩時,設置優化系統的最終輸出值為輪轂電機的最大扭矩,程序框圖如圖6 所示。圖中TL2L、TR2L為經過判定之后由總線輸出到MCU的扭矩值。

圖6 扭矩限制監測模塊
4 轉矩分配策略仿真測試
首先在多變附著條件的路面上對本文設計的轉矩分配算法進行仿真。在260 m的水平道路上,設置最優滑轉率分別為0.17、0.13、0.17,對應長度分別為80 m、80 m、100 m的3段測試路面。優化前、后的滑轉率曲線如圖7所示,車輛直線行駛速度如圖8所示,直線行駛過程中驅動輪輸出的轉矩曲線如圖9所示。
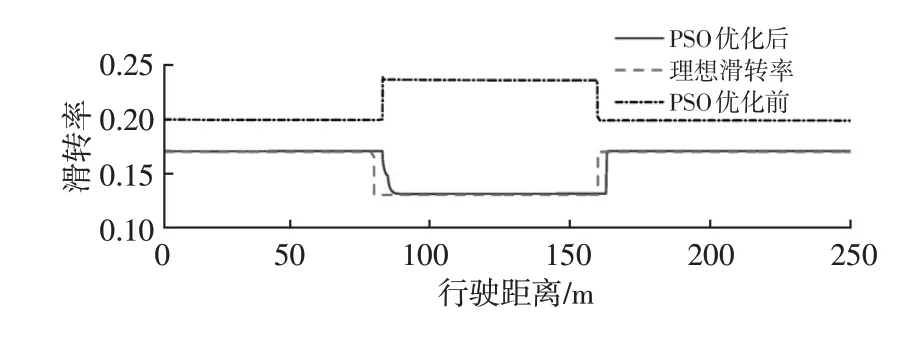
圖7 優化前、后驅動輪滑轉率
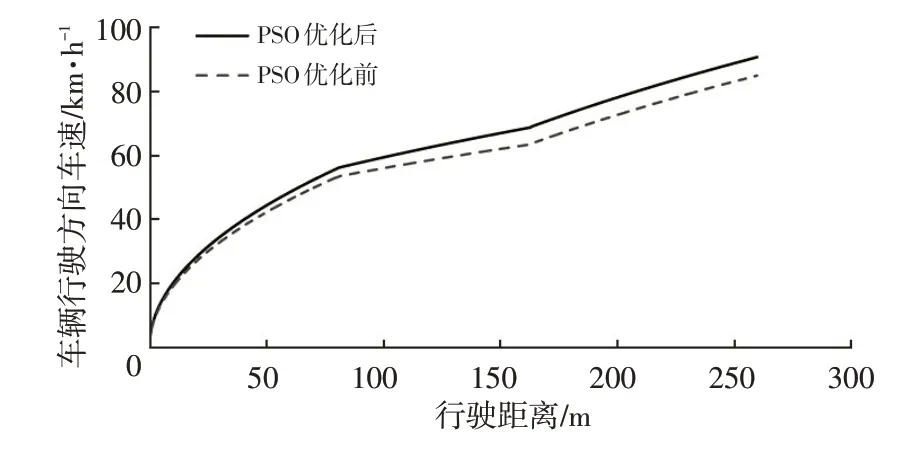
圖8 優化前、后行駛速度
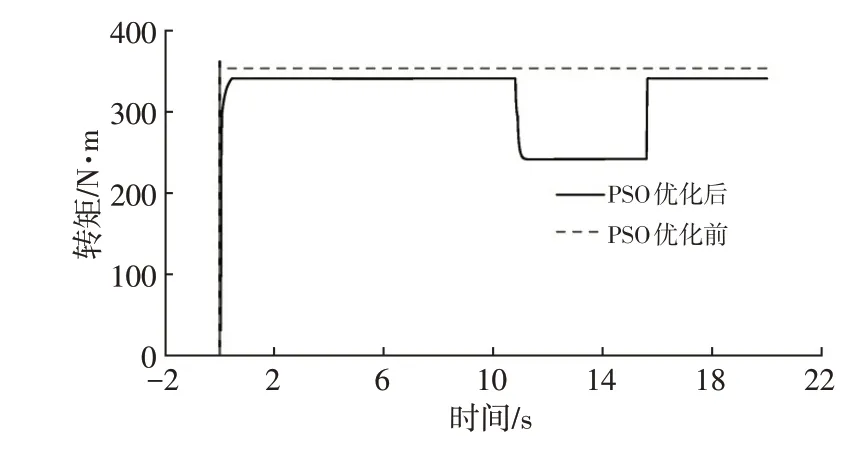
圖9 優化前、后驅動輪驅動轉矩
從仿真測試結果可得:本文提出的轉矩優化分配算法可以在附著條件多變的路面上減小驅動輪的滑轉率,提高行駛安全性;優化分配后的滑轉率基本保持在最優滑轉率附近,有更高的路面利用附著系數,可以提升整車的動力性。
多變附著條件路面仿真后,設計固定附著條件路面上雙移線工況仿真,將路面最優滑轉率設置為0.13。為突出轉矩分配及優化性能,設置車輛從靜止開始起步,油門踏板開度為0.7,沿標準雙移線路徑行駛。仿真結果如圖10~圖12所示。
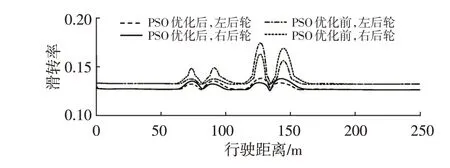
圖10 優化前、后驅動輪滑轉率
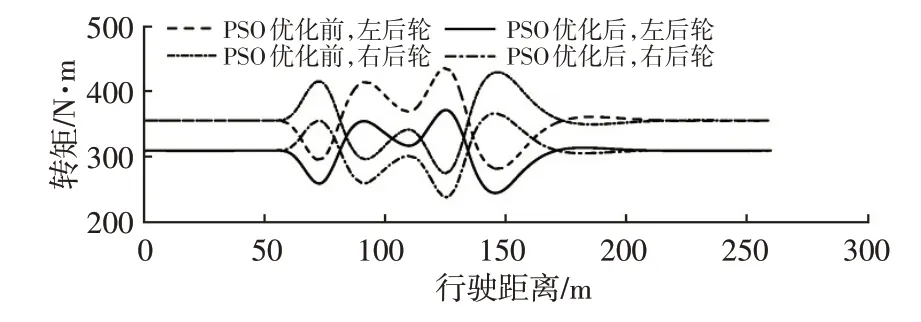
圖11 優化前、后驅動輪輸出轉矩

圖12 優化前、后行駛速度
分析雙移線工況仿真測試結果可知:本文設計的轉矩優化分配算法在轉向過程中同樣可以有效控制左、右驅動輪的輸出轉矩,并將驅動輪的最大滑轉率由0.175 降至0.140 附近,貼近該路面上最優滑轉率,獲得了最大的路面利用附著系數;降低驅動輪滑轉率可以提升整車的駕駛穩定性,提高路面利用附著系數可以提高動力性。
5 HIL驗證分析
在目標樣車的網絡架構中,轉矩輸出功能設置在VCU 中。本文設計的優化分配算法計算量較大,故使用Infineon TC 265D 處理器搭建VCU 硬件,該控制器為32 bit雙核處理器,可滿足處理器計算能力的需求,如圖13所示。
在整車行駛過程中,轉矩優化分配計算所需要的轉速信號經過P-CAN傳輸至VCU,優化計算完成后,VCU將轉矩信號經P-CAN 傳輸至MCU,達到調整驅動電機輸出轉矩的目的。
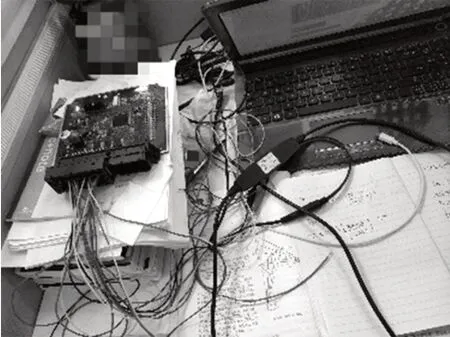
圖13 調試中的VCU
HIL 測試 時,選用dSPACE 的ASM Vehicle Dynamics Model 車輛動態模型搭建測試場景模型,進行HIL仿真測試,如圖14所示。
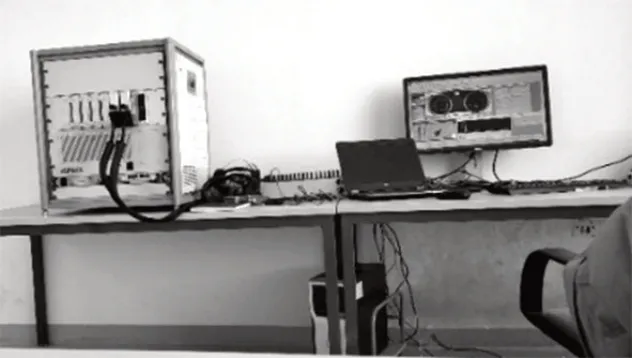
圖14 VCU硬件在環測試系統
本文利用HIL測試進行了雙移線工況測試,測試場景同仿真測試中雙移線測試場景。同時,作為對比,選擇將PSO優化轉矩輸出部分代碼直接刪除,將基于車輛動力學計算的轉矩直接輸出給HIL 測試設備作為轉矩優化前的對比數據。HIL測試結果如圖15~圖17所示。
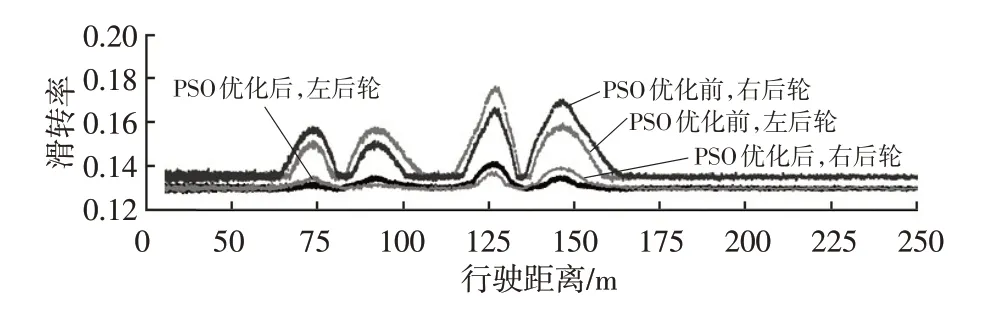
圖15 優化前、后驅動輪滑轉率

圖16 優化前、后驅動輪輸出轉矩
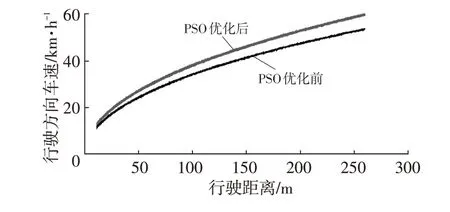
圖17 優化前、后驅動輪輸出轉矩
由HIL測試結果可知,雖然HIL測試結果與仿真測試結果的驅動輪輸出轉矩有所偏差,但是在忽略硬件信號傳輸及采集噪聲誤差的情況下,PSO 在硬件平臺上同樣可以實現優化轉矩分配的功能,在相同的測試條件下,能夠比僅依靠車輛動力學計算得出的轉矩更貼近行駛路面的最優滑轉率,并在減少轉矩輸出的同時獲得更大的路面附著系數,較好地實現電子差速及優化轉矩輸出的功能,提高車輛運行過程中的經濟性和駕駛穩定性。
6 結束語
本文在分析整車力學模型的基礎上,進行了驅動輪轉矩的分配。在初步分配后,預測計算下一報文周期的驅動輪滑轉率,并使用粒子群優化算法對該非線性優化目標進行尋優計算,計算得出下一報文周期最優的輸出轉矩。多變附著條件路面及固定附著條件路面雙移線工況仿真結果表明,本文設計的算法可以很好地控制轉矩輸出,并將滑轉率控制在最優滑轉率附近,以獲得最大的路面附著系數。在此基礎上使用Infineon TC265D搭建整車控制器,并進行了HIL測試,結果顯示,本文設計的算法在硬件平臺上同樣能實現設計的優化功能,增強車輛的駕駛操控穩定性和行駛安全性。
猜你喜歡
艦船科學技術(2022年13期)2022-08-11 09:30:02
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
鐵道通信信號(2020年9期)2020-02-06 09:15:22
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
