無人值守的自動控制式新型水閘技術分析
2020-09-22 00:11:00岳全泉
建材與裝飾 2020年26期
岳全泉
(廣州市番禺區協同水利水電建設工程有限公司,廣東廣州 511400)
0 引言
對于水閘結構本身來說,在自控系統的實際運行過程,一方面要能夠精準獲取各類信號,從而讓水閘結構可以通過對于相關信息的取得獲得基礎性的運行指令,另一方面要能夠做出專業的響應動作信號,讓水閘結構可正常運行。
1 自動控制式新型水閘的構成
水閘結構的主體部分為閘室區域,其中閘室內部設置的結構包括底板、工作橋以及啟閉機,從而形成了活動機構,在該系統的工作過程,可以通過對所有硬軟件設施的使用,讓水閘中的主體結構可以活動[1]。
本工程以計算機控制為主、常規控制為輔。要求自動化監測與控制系統設計原則是:經濟實用、安全可靠、技術先進、易于維護。因此對相關要點展開分析:
(1)設計目標:無人或者少人值守,日常運行控制完全借助自動化系統實現,通過獲取各項信息與參數,發出控制指令。
(2)分層結構:采用兩層配置結構,包括現地控制層與集中控制層,同時構造遙信、遙測、遙控以及遙調的整體控制系統。
(3)系統資源配置:自動控制系統退出時,要直接調派該系統的專業管理人員,讓其觀察工程現場,只有在滿足系統開機條件時,方可按照操作方法開機。
(4)安全保障方法:在系統中要配置冗余設備,在某設備故障時,備用設備立即投入運行,且該系統要具備自動糾錯能力,可使用控制匯率或者硬軟件系統,分析該方法的工作信息,之后給出該系統的控制結果。
(5)設備選用:在控制系統配置過程,考慮到設備的先進性、完備性、開發性和可擴充性,核心硬件可采用國外優質設備,對于線束、端口等設備,可選用國內優質產品。
(6)系統原則:經濟實用、性價比高。
(7)運行性能:可維護、統一標準、統一管理規范、人機交互界面合理。
(8)環境抵抗能力:防雷電和抗干擾。
2 無人值守的自動控制式新型水閘設計方案
2.1 自動控制系統任務
基于無人值守思路下的自動控制系統建設過程,首先是能夠在閘門出現卡滯時,讓啟閉機的螺桿結構可以向下運動一段較小距離,同時欠流繼電器動作,確保水閘結構中的啟閉機處于安全運行狀態。
其次通過對載荷重量傳感器發出的信息進行分析,實現對當前載荷總量的精準測定,控制啟閉機設備的載荷重量信息,讓系統獲得自主化的升級與改進效果。
最后是水閘動作響應,根據當前已經獲得的相關數據,將獲取的測量信息由自動控制系統所識別,發出系統控制指令,讓水閘結構做出正確響應動作。
2.2 自動控制方案選擇
在系統建設過程,首先要配置傳感器,可以主動分析水閘結構當前運行狀態,與設定參數進行對比。其次要建立多個功能模塊,可分為數據存儲模塊、數據產生模塊和數據利用模塊,借助PLC控制系統,和水閘硬件關聯,之后給出控制指令。最后是被控對象其他設備配置,要能讓啟停機可以接收基于PLC控制系統發出的指令。
2.3 自動控制系統構造
自動控制系統要根據PLC控制系統的相關要求,實現對整個控制體系的配置,具體的設備控制流程圖如圖1所示。
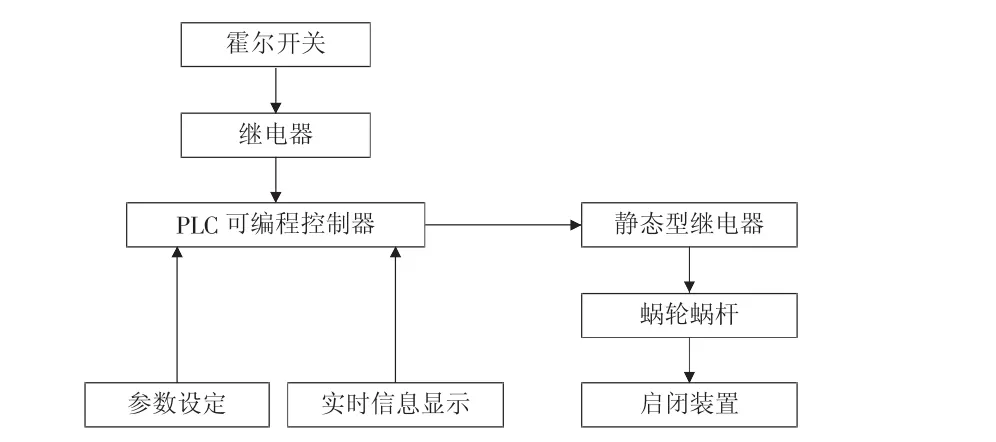
圖1 水閘自動控制系統運行流程
行程開關可以測量電路參數,將信息直接提交給繼電器,該指令可被PLC控制器接收,之后該系統使用已設定的參數實時顯示信息,同時可借助參數分析水閘接口所需要做出的響應,將相關控制信息直接傳遞給靜態型繼電器,繼電器可作用于渦輪蝸桿結構,使得啟閉裝置做出響應[2]。
2.4 自動控制系統配置
自動控制系統的配置過程,要根據該系統的本身精準性要求,實現對傳感器、核心控制部件以及被控對象的加入。傳感器要根據運行原理、運行功能等,在相關區域合理配置,讓傳感器收集數據。加入核心控制模塊過程,要根據功能在其中加入相關軟件,實現對模塊高效應用。對于被控對象,通過靜態型繼電器,可以完全根據控制指令做出響應動作。
3 無人值守的自動控制式新型水閘實施方法
3.1 系統傳感器配置
系統傳感器要實現對電力系統的監管、相關數據的分析和記錄等,檢查當前供電系統中的電力參數,由控制中樞分析是否存在問題。從當前傳感器表現上來看,要根據該傳感器運行要求和原理,實現對所有參數的選擇,同時直接提交給當前已經建立的PLC控制系統中樞,在后續的運行過程,通過對該參數的使用,詳盡分析運行狀態。
3.2 控制中樞配置
在控制中樞的配置過程,首先要根據該系統的運行狀態,實現對所有參數的控制。其次要根據控制中樞的功能體系,實現內部運行邏輯的交互。最后是對于控制體系的合理變革。在具體配置過程,需要建立專業的控制計算機,同時采用冗余配置思想,一臺計算機發生故障時,備用計算機立即投入工作。主機中樞功能包括對整個工程計算機控制系統和數據庫管理,在線或離線計算功能,各種圖表、曲線的生成,事故、故障信號分析處理。運行值守人員通過監視器的圖形化畫面,進行整個工程運行監視、控制和數據庫報表管理。
計算機控制系統采用分層分布式的開放型結構,控制系統分兩層,即集中控制層和現地控制層。
對于集中控制層,該系統配置在副廠房的中央控制室,網絡技術為100Mbps的快速以太技術,通信協議為TCP/IP技術,從而形成開放結構的網絡系統。在設備選擇中,包括2臺計算工作站、1臺網絡信息交換機、1臺激光打印機、1套GPS系統以及語音告警系統。
對于現地控制層,在其中配置LCU控制柜,1#機組的控制柜控制兩臺工作機組,2#公用控制柜控制水位顯示設施、告警設施以及網絡設施。
對于圖像系統,可細分為4個子項目,包括前端設施、信息傳遞設施、系統控制設施、信息的展現與記錄設施。其中前端設施包括彩色搞分辨率攝像機、云臺以及室外空間防護設備,以獲取并采集圖像數據,本工程中的攝像機為高性能彩色攝錄機;對于信息傳遞設備,需要分析信息的傳遞距離和圖像質量,之后配置專業的線纜與接口設施,從而讓視頻信息被傳遞到控制中心中,且這類數據與信息可經過壓縮處理,以專業方法與路徑傳遞到信息處理點。對于系統控制設備,應用高性能的硬盤錄像機,其中主機負責設備和圖像設備、云臺、系統可區分和分組同步、圖像檢索以及處理等多項功能;對于信息的顯示與記錄設備,要根據圖像的展示需求,在其中合理配置圖像展現設備,包括監視器、投影機與顯示器等設施。
3.3 控制指令使用
控制指令的最終作用對象是當前該系統中存在的啟閉裝置,在該設置的使用過程,要在其之前配置信號的接收裝置,該裝置的作用是可以獲取控制系統發出的控制指令,并被穩定型繼電器所識別,之后根據其中存在的電流參數和電壓參數,讓啟閉機作出響應,繼電器的高壓端可以直接讓該設備的活動機構運行,實現對蝸桿螺桿的狀態控制,該系統的運行原理圖如圖2所示。
4 結論
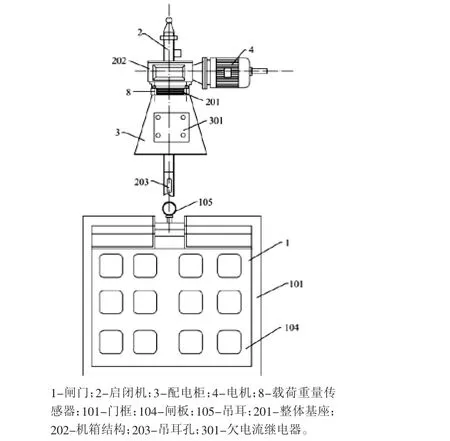
圖2 啟閉機系統構成
綜上所述,無人值守的自動控制式水閘系統運行過程中,所需要選擇的控制思路為PLC控制系統,在其中要加入行程開關、開度儀等,通過相關信息的獲得,讓取得的測量結果直接調配到已經構造的控制中樞內。該體系的后續工作階段,可以對這類信息直接展示,讓建立的控制工作模塊可以處于有序運行狀態。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
電子制作(2018年11期)2018-08-04 03:26:08
中華手工(2017年2期)2017-06-06 23:00:31
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
工業設計(2016年12期)2016-04-16 02:52:00
現代企業(2015年9期)2015-02-28 18:56:50
中外會展(2014年4期)2014-11-27 07:46:46
消費者報道(2014年7期)2014-07-31 11:23:57
