航行船舶除銹機器人設計方案研究
2020-09-22 13:27:18張闖徐丹陽郝凱賓潘慶澤袁惲凱
理論與創新 2020年14期
關鍵詞:仿真
張闖 徐丹陽 郝凱賓 潘慶澤 袁惲凱
【摘? 要】隨著中國船舶行業的發展,傳統除銹的手段已經不能滿足船塢的需求。本文提出了一種航行船舶除銹機器人設計方案,針對機械部分與控制部分進行了設計,并通過仿真驗證了可行性,以此來供業內人士參考交流。
【關鍵詞】船舶除銹;設計方案;PLC;仿真
引言
目前,隨著中國逐漸成為造船中心,我國船舶業蓬勃發展。船舶除銹是船舶維修的重要部分,每年船塢對大量的船舶進行除銹并重新噴涂防銹漆。雖然除銹工藝隨著科技的發展,從人工逐漸轉變為了機械除銹,但不可避免的是除銹過程將對環境造成污染,并且能耗高、浪費資源。目前如何高效、低污染除銹已經成為了研究的熱點。
本文提出一種航行船舶除銹機器人,是一種可以在船舶航行過程中定期除銹的一種裝置,以爬壁機器人為載體,通過永磁體及真空吸附的方式緊貼在船舶表面,通過自動導引運輸車(AGV)的導航定位系統控制,搭載除銹刮刀實現“即銹即除”以達到最好的除銹效果。
1.概要設計
航行船舶除銹機器人主要是通過進行防水、防銹處理的爬壁機器人搭載除銹裝置配合控制系統在船舶航行過程中對船舶定期除銹的裝置。需要進行方案設計、力學分析、樣機設計、程序設計四大部分。
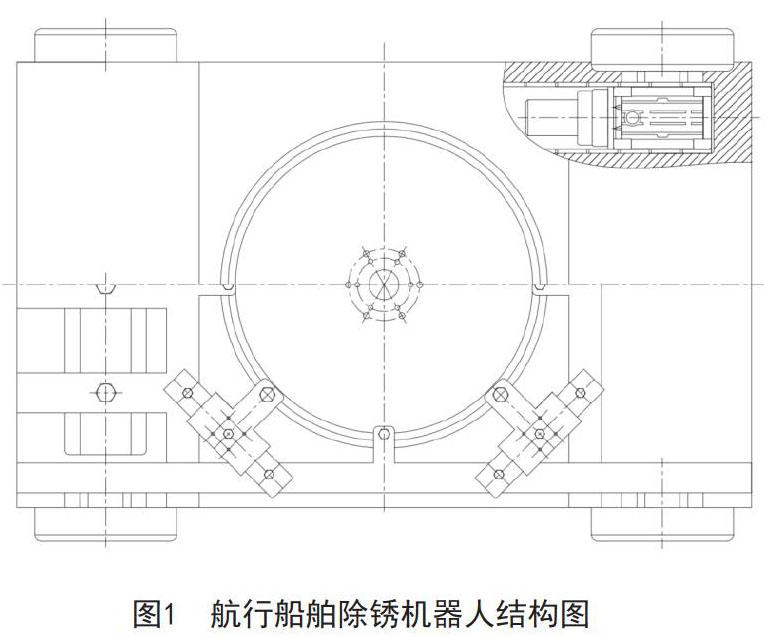
本設計的核心部分為爬壁裝置,由內置磁性吸附塊的履帶覆蓋的麥克納姆輪、真空吸附裝置、配合減速裝置的交流伺服電機、機架和防水防銹箱體組成,它通過嵌于履帶的適當大小永磁體塊以及真空負壓吸附裝置實現在船舶上的吸附,配合著控制系統實現在船舶上的移動。此外還有高效除銹刮刀裝置實現航行除銹;AGV導航定位裝置以及多傳感器融合的監控裝置實現對位置、環境以及船舶表面狀況的監控;基于C語言的PLC智能控制系統實現電路的設計;基于AR的人機交互控制系統實現對裝置的控制。
2.機械部分設計
機器人結構選擇了速度快、效率高、越障能力強的輪式機器人,雖然轉向能力較差,但使用麥克納姆輪保證了轉向的能力,同時表面嵌有永磁體塊的履帶,保證了吸附能力。高效除銹刮刀裝置選用四個刮刀均布旋轉除銹。同時安裝了多傳感器與攝像頭實時監控。
該設計的核心部分是用于搭載其他部件的爬壁裝置,不但要考慮到其他裝置的裝載,并且要考慮工作條件。首先考慮到其與一般的爬壁機器人相比自身受較大重力,故應該具有較強的驅動能力。其次由于其工作環境惡劣,其也還要需要具有的吸附能力。最后要實現對不同需求的航行船舶的除銹,機器人應進行模塊化設計,根據不同需求選擇性搭載檢測部件。
考慮到設備不易過大,設備箱體外形尺寸應小于1000mm×1000 mm×500 mm,同時設備不易過重,質量應小于200kg。由于設備在海水中工作,其首先要保證自身的防銹與防水。海水強腐蝕性和天然電解質,設備箱體必須具有良好的耐腐蝕性,通常海洋開發水下裝備常用鎳基合金蒙乃爾400(Ni68Cu28Fe),具有良好的耐腐蝕性,同時其密度比鐵稍大,可以滿足質量的要求。在防水上,防水等級需要達到IPX8,同時考慮到設備的能源問題,選擇通過聚氨酯PUR防水電纜進行供電,同時起到防丟失的作用,通過密封膠圈密封,保證設備的防水性。
目前,普通的爬壁機器人一般在10kg左右,普通船舶除銹機器人約80kg左右,考慮到該裝置的性能要求以及材料,質量要比以往的爬壁機器人大得多,整體重力約在2000N,選用電機轉矩應足夠大,保證機器人可以沿著船舶表面正常前進與轉彎。同時考慮到船舶航行過程中海浪的沖擊,需要具有較大的吸附力保證機器人能在船舶表面40°的傾斜下能夠在航行過程中不脫落船體,通過永磁體及真空吸附兩種方式結合吸附。
此外高效除銹刮刀裝置由伺服電機、減速裝置、四個特制的刮刀組成,刮刀獨特的可伸縮設計可以滿足不同除銹的需求。該部分要保證輸出的扭矩足夠大,但又不傷及船體,同時轉速也不能太慢才能達到除銹的效果,刮刀要保證強度、硬度以及耐腐蝕性。由于該設計為航行中除銹,除銹難度較為簡單,該裝置可以滿足質量Sa2.5級的除銹效果。
3.控制部分設計
在我國智能機電裝備的工業設計中,PLC被廣泛使用,具有精度高、易操作、成本低等優點,并且可以應用于航行中的惡劣環境。故航行船舶除銹機器人主要采用PLC控制,使用高度集成的PLC硬件用程序代替接線設計,其編程語言簡單、技術成熟,可以使用Keil軟件編程,并且出現問題時調試方便。
其通過上機位(PC機)與下機位(PLC)通過CAN(Controller Area Network)總線通訊控制,主要有電機驅動模塊、電路穩壓模塊、環境監測模塊三大部分。機器人的運動主要通過伺服驅動器控制伺服電機來通過減速裝置驅動麥克納姆輪進行控制,采用四輪獨立驅動轉向(4WID-4WIS)控制機器人的移動。其除銹工作方式有兩種。一是智能除銹,通過安裝設備前錄入的船舶結構信息通過AGV(Automatic Guided Vehicle)導航技術,結合環境監測模塊采集的信息,自行規劃軌跡除銹。二是人工控制,通過環境監測模塊采集到的各項數據,以及傳回的影像通過渲染與虛擬信息相結合,實現增強現實,采用人工的操控的方式進行除銹。
4.三維建模與仿真
UG是一個交互式的CAD/CAM系統軟件,廣泛用來應用在三維建模、模擬分析等領域,能夠毫不費力把復雜的模型建立出來。該設計通過UG建立出樣機模型,通過Adams對磁力的仿真數據、計算的電氣元件參數,使用UG進行運動學仿真航行中裝置的工作狀況,對其進行測試,說明所設計的航行除銹爬壁機器人的設計是可行的。
5.結語
本文提出了一種航行船舶除銹機器人的總體設計方案, 給出了其設計方案,并驗證了可行性。設計了一種可以在航行過程中除銹的裝置,較傳統機電設備設計相比融入了新技術的創新。其可以減少資源的消耗與環境污染生產成本較船塢除銹低、適用性強、便于操作,值得技術推廣。
參考文獻
[1]趙軍友,張亞寧,畢曉東,閆成新,董亞飛.噴砂除銹爬壁機器人磁吸附結構優化設計及整機性能試驗[J].中國石油大學學報(自然科學版),2020,44(04):94-99.
[2]王巖.洋山四期自動化碼頭AGV設備控制系統創新研究[J].中國設備工程,2020(12):102-104.
猜你喜歡
科技資訊(2016年18期)2016-11-15 20:09:22
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
企業導報(2016年6期)2016-04-21 17:56:19