GAMIT用于GNSS長基線解算分析
2020-09-22 13:36:04張青勇
理論與創(chuàng)新 2020年14期
關(guān)鍵詞:系統(tǒng)
張青勇

【摘? 要】為了驗證GAMIT用于四大全球衛(wèi)星導(dǎo)航系統(tǒng)(GPS、BDS、GLONASS和GALILEO)長距離精密相對定位的可靠性與定位精度,該文以MGEX(Multi-GNSS Experiment)的觀測數(shù)據(jù),利用GAMIT10.7軟件進行基線解算,并根據(jù)基線解算的相關(guān)評定指標(biāo)對解算結(jié)果予以分析。由實驗結(jié)果可知,GPS綜合解算結(jié)果最優(yōu),其次為GALILEO、GLONASS,BDS綜合解算結(jié)果比其它三系統(tǒng)較差,但仍能滿足長距離精密相對定位的有關(guān)要求。研究結(jié)果表明,GAMIT能較好的應(yīng)用于四大全球衛(wèi)星導(dǎo)航系統(tǒng)的長距離基線解算。
【關(guān)鍵詞】GAMIT10.7;GNSS基線解算;GNSS數(shù)據(jù)處理;精密相對定位
1.GAMIT基線解算原理
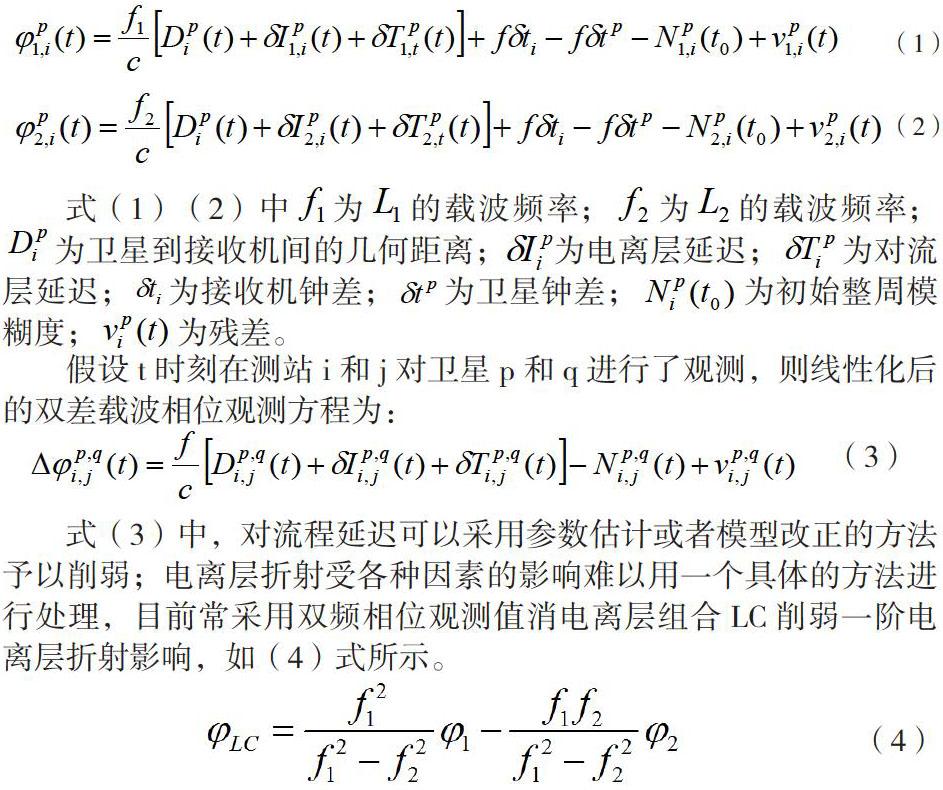
GAMIT采用雙差法處理原始觀測值,雙差觀測量可以完全消除衛(wèi)星鐘差和接收機鐘差影響,同時也可以明顯的削弱諸如軌道誤差、大氣折射等系統(tǒng)誤差的影響。假設(shè)t時刻在測站i對衛(wèi)星p進行了觀測,則線性化后的雙頻載波相位觀測方程為:
式(1)(2)中為的載波頻率;為的載波頻率;為衛(wèi)星到接收機間的幾何距離;為電離層延遲;為對流層延遲;為接收機鐘差;為衛(wèi)星鐘差;為初始整周模糊度;為殘差。
假設(shè)t時刻在測站i和j對衛(wèi)星p和q進行了觀測,則線性化后的雙差載波相位觀測方程為:
式(3)中,對流程延遲可以采用參數(shù)估計或者模型改正的方法予以削弱;電離層折射受各種因素的影響難以用一個具體的方法進行處理,目前常采用雙頻相位觀測值消電離層組合LC削弱一階電離層折射影響,如(4)式所示。
式(4)中,LC觀測值經(jīng)雙差組合后消除了電離層影響,但LC觀測值的模糊度已不再具有整數(shù)特性,為了準(zhǔn)確固定LC觀測值的整周模糊度,可借助于寬巷WL和窄巷NL組合觀測值對LC模糊度進行分解。
2.GNSS基線解算流程
為了驗證GAMIT10.7軟件用于全球四大衛(wèi)星導(dǎo)航系統(tǒng)的長距離基線解算的可行性,本文選取MGEX東亞地區(qū)的四個測站(JFNG、HKSL、DAEJ、GMSD)2019年第024天至第030天共一周的混合系統(tǒng)觀測數(shù)據(jù)進行基線解算分析,實驗數(shù)據(jù)觀測時間為24h、采樣間隔30s、觀測條件良好,廣播星歷采用全球廣播星歷brdc,精密星歷采用武漢大學(xué)發(fā)布的事后多系統(tǒng)混合精密星歷wum。由于北斗三號衛(wèi)星的數(shù)據(jù)比較少且仍處在調(diào)試與建設(shè)階段,本次實驗選取北斗二號的數(shù)據(jù)(PRN:C01-C16),下文所說的BDS均為BDS-2。截止目前,GAMIT仍只能處理單系統(tǒng)的數(shù)據(jù),即每個衛(wèi)星導(dǎo)航系統(tǒng)單獨進行基線解算。由于篇幅有限,現(xiàn)以HKSL測站為例。
3.數(shù)據(jù)處理
GAMIT軟件內(nèi)置了許多基線解算的參數(shù),為了確保解算結(jié)果的可靠性,在利用GAMIT進行長距離基線解算時需要配置基線解算策略文件sestil.以及測站約束文件sittbl.。測站約束值平面為5cm,高程為10cm。
4.結(jié)果分析
4.1基線分量中誤差
通過GAMIT軟件得到了7天JFNG、HKSL、DAEJ、GMSD四個測站的基線解算結(jié)果,并從年積日文件夾下的q文件或者o文件中提取相關(guān)信息。由于篇幅有限,現(xiàn)僅列出HKSL_JFNG基線解算的結(jié)果,如表1所示。
由表1知,四系統(tǒng)基線解算的N方向與E方向基線分量中誤差都在5mm以內(nèi),相差不大;而在U方向上卻呈現(xiàn)出了較大的差異,GPS最優(yōu)為8.1mm,GAL和GLO其次,分別為9.7mm與12.8mm,BDS最差為20.4mm。
4.2基線長度較差
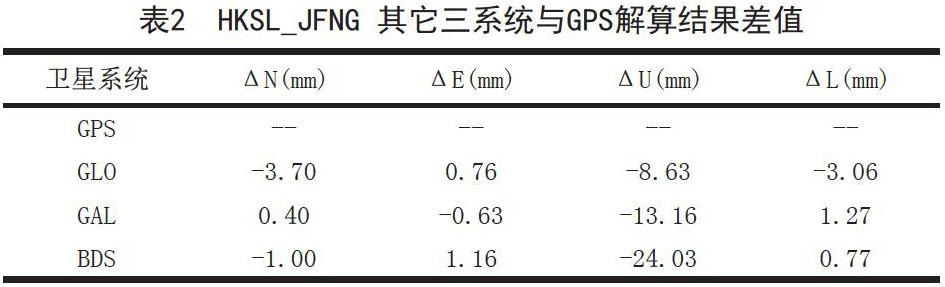
當(dāng)今,GPS是四大全球衛(wèi)星導(dǎo)航系統(tǒng)中最為成熟的衛(wèi)星系統(tǒng),我們一般認(rèn)為它可靠性強、精度高,因此在此假設(shè)GPS基線解算的結(jié)果為真值,其它系統(tǒng)通過與GPS對比評估其基線解算結(jié)果的優(yōu)劣程度。表2列出了HKSL_JFNG四系統(tǒng)的基線較差。
由表2知,在N方向與E方向上,三系統(tǒng)與GPS的基線差值都在4mm以內(nèi);在U方向上,GAL為8.63mm、GLO為13.16mm、BDS為24.03mm,GLO、GAL解算的結(jié)果優(yōu)于BDS;四者基線長度解算的精度相當(dāng),與GPS較差在4mm以內(nèi)。
4.3標(biāo)準(zhǔn)化均方根誤差(NRMS)
NRMS值是用來表示單時段解算出的基線值偏離其加權(quán)平均值的程度,是衡量GAMIT基線解算結(jié)果的一個重要指標(biāo),一般0.12~0.25為宜,如果大于0.5則說明在數(shù)據(jù)處理過程中部分周跳未完全修復(fù)或是其它原因所造成。圖1展示出了7天內(nèi)四系統(tǒng)基線解算的NRMS值。
從圖1 可以看出四系統(tǒng)各自的NRMS值:GPS為0.21左右,GLO為0.23左右,GAL為0.26左右,BDS為0.20左右,表明四系統(tǒng)基線解算都得到了良好的NRMS值,其中BDS解算的結(jié)果最優(yōu),GAL相對于其它系統(tǒng)來說解算結(jié)果最差。
4.4模糊度固定程度
模糊度處理對于GNSS高精度數(shù)據(jù)處理來說至關(guān)重要,只要能夠準(zhǔn)確地確定出模糊度,就可以將其轉(zhuǎn)換為毫米級精度的距離觀測值,從而能夠進行毫米級的定位。GAMIT在基線解算完成后會在每個年積日文件夾下生成一個summary文件,里面顯示了本次基線解算的寬巷模糊度(WL)和窄巷模糊度(NL)固定的百分比,在GAMIT中,一般認(rèn)為WL應(yīng)大于90%,NL應(yīng)大于80%。
在解算長基線時,GPS、GAL、BDS能夠很好的固定模糊度,其中BDS模糊度固定結(jié)果最優(yōu),GPS與GAL次優(yōu),而GLO模糊度的固定結(jié)果不理想,尤其是窄巷模糊度(NL)固定百分比不到10%。
4.5基線重復(fù)性
基線重復(fù)性是衡量數(shù)據(jù)處理質(zhì)量的重要指標(biāo)之一,GAMIT軟件解算長基線的相對精度能達到10-9數(shù)量級,解算短基線的精度能優(yōu)于1mm。基線重復(fù)性按下式計算:
式(5)中,n為基線單日解數(shù)目;為第i日的基線分量(或邊長);為單天解基線分量(或邊長)的加權(quán)平均值。式(6)中,為基線向量的重復(fù)性。
進一步以基線重復(fù)性為觀測值,采用線性擬合求出基線重復(fù)性的常數(shù)部分和與邊長成比例的部分:
式(7)中:為分量的重復(fù)性精度指標(biāo);為分量固定誤差;為相對誤差;為基線的長度。
表3 顯示出了HKSL_JFNG四系統(tǒng)基線向量的重復(fù)性,圖2顯示出了其線性擬合的結(jié)果。可以看出,四系統(tǒng)基線重復(fù)性的固定誤差誤差均小于2mm,相對誤差均優(yōu)于10-9,都展現(xiàn)出了良好的基線解算結(jié)果。對于相對誤差,GPS的相對誤差最小為0.004×10-8,GAL和GLO居中,分別為0.062×10-8及0.088×10-8,BDS的相對誤差最大為0.116×10-8。表明GPS的基線重復(fù)率受基線長度的增加影響最小,而BDS的基線重復(fù)率受基線長度的增加影響最大。
參考文獻
[1] 楊元喜.北斗衛(wèi)星導(dǎo)航系統(tǒng)的進展、貢獻與挑戰(zhàn)[J]. 測繪學(xué)報, 2010, 39(1): 1-6.
[2] 陳俊勇.全球?qū)Ш叫l(wèi)星系統(tǒng)進展及其對導(dǎo)航定位的改善[J]. 大地測量與地球動力學(xué), 2009, 29(2): 1-3.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32