基于BDS-2/BDS-3聯(lián)合處理的北斗超快速鐘差預(yù)報優(yōu)化策略
2020-09-23 02:02:46馬昌忠王潛心閔揚(yáng)海王澤杰
導(dǎo)航定位與授時 2020年5期
關(guān)鍵詞:模型
馬昌忠,王潛心,胡 超,閔揚(yáng)海,王澤杰
(1. 中國礦業(yè)大學(xué)自然資源部國土環(huán)境與災(zāi)害監(jiān)測重點實驗室,徐州 221116;2. 中國礦業(yè)大學(xué)環(huán)境與測繪學(xué)院,徐州 221116)
0 引言
目前,國際GNSS監(jiān)測與評估系統(tǒng)(interna-tional GNSS Monitoring and Assessment System, iGMAS)發(fā)布的超快速鐘差產(chǎn)品中,中國北斗衛(wèi)星導(dǎo)航系統(tǒng)(BeiDou Navigation Satellite System, BDS)觀測和預(yù)報部分精度分別約為0.60ns和6.00ns,遠(yuǎn)遠(yuǎn)不能滿足實時cm級應(yīng)用需求[1]。因此,在提高全球?qū)Ш叫l(wèi)星系統(tǒng)產(chǎn)品可用性、穩(wěn)定性和可靠性的前提下,有必要進(jìn)一步完善BDS超快速衛(wèi)星鐘差產(chǎn)品質(zhì)量,尤其是預(yù)報鐘差精度。
當(dāng)前,針對衛(wèi)星鐘差預(yù)報的研究主要集中在3個方面:1)衛(wèi)星鐘差序列預(yù)處理策略[2-4];2)預(yù)報模型精化處理[5-7];3)環(huán)境因素對鐘差建模的影響分析[8-9]。此外,在鐘差預(yù)報算法和策略研究中,學(xué)者主要關(guān)注鐘差序列長期預(yù)報模型研究,如擴(kuò)展?fàn)顟B(tài)模型[10]和人工神經(jīng)網(wǎng)絡(luò)預(yù)報[11];多個短周期項疊加預(yù)報,如改進(jìn)的迭代法以及基于恒星日濾波的單天內(nèi)鐘差變化量預(yù)報等[5]。通常衛(wèi)星鐘差預(yù)報模型采用趨勢項(多項式)與周期項表示[5,12]。同時,毛亞等提出了一種改進(jìn)的預(yù)報策略[13],即考慮星間相關(guān)性對模型參數(shù)估計的影響,一定程度上提升了BDS-2鐘差預(yù)報精度。
然而,BDS超快速鐘差建模中廣泛采用組合趨勢項與周期項的函數(shù)模型[2,14],主要以全球定位系統(tǒng)(Global Positioning System,GPS)相關(guān)研究為參考。此外,黃觀文等提出了一種改進(jìn)的BDS超快速鐘差預(yù)報策略,其中非線性項通過BP神經(jīng)網(wǎng)絡(luò)(Back Propagation Neural Network,BPNN)進(jìn)行建模處理[1]。陳金平等評估了基于星間鏈路觀測數(shù)據(jù)的BDS-3試驗星鐘差預(yù)報特性[15]。此外,研究表明BDS-3配備的星載原子鐘頻率穩(wěn)定性較BDS-2提升了1個量級以上。胡超等通過引入星間相關(guān)性[16],聯(lián)合預(yù)報了BDS-2和BDS-3超快速產(chǎn)品,并評估了星間相關(guān)性對超快速鐘差預(yù)報產(chǎn)品精度的影響[17];基于1個月的實驗數(shù)據(jù)表明,引入星間相關(guān)性可實現(xiàn)BDS-2和BDS-3衛(wèi)星18h預(yù)報鐘差精度分別提高30.7%~47.3%和49.9%~59.3%。因此,為進(jìn)一步提高北斗超快速預(yù)報鐘差產(chǎn)品質(zhì)量,后續(xù)研究中有必要對BDS-2和BDS-3鐘差聯(lián)合處理中的相關(guān)性系數(shù)進(jìn)行深入挖掘分析與處理。
與當(dāng)前廣泛使用的鐘差預(yù)報模型[1,13]相比,北斗衛(wèi)星鐘差建模中,模型參數(shù)估計存在2個主要問題需要優(yōu)化:1)建模過程中,通常將趨勢項與周期項分為兩部分進(jìn)行獨立處理,不可避免地忽略了未知參數(shù)之間的相關(guān)性[16];2)在建模中,只考慮顯著周期項(如BDS-2 2個周期、BDS-3 3個周期)[17],將導(dǎo)致模型殘差無法建模。因此,為了獲得更準(zhǔn)確且可靠的北斗鐘差預(yù)報模型,需要對BDS鐘差建模策略進(jìn)行優(yōu)化處理,如精化鐘差模型項以及模型系數(shù)等。本文將利用一步求解策略,實現(xiàn)北斗各衛(wèi)星鐘差模型的統(tǒng)一估計;同時在一步模型參數(shù)估計中,對預(yù)報模型的精度、參數(shù)數(shù)目和參數(shù)類型(周期項和趨勢項個數(shù))進(jìn)行權(quán)衡;為獲得最優(yōu)鐘差模型,模型參數(shù)估計中借助機(jī)器學(xué)習(xí)中稀疏建模的思想進(jìn)行優(yōu)化處理[18]。
本文主要針對傳統(tǒng)鐘差預(yù)報模型建模策略的缺點,采用BDS-2/BDS-3鐘差序列聯(lián)合處理的方法,優(yōu)化北斗超快速衛(wèi)星鐘差產(chǎn)品。首先,基于稀疏建模方法提出了一種模型選擇方法,對傳統(tǒng)的鐘差預(yù)報兩步策略進(jìn)行改進(jìn);其次,設(shè)計了一種BDS-2/BDS-3聯(lián)合處理策略,以充分利用BDS-2與BDS-3星間相關(guān)性實現(xiàn)參數(shù)解算增強(qiáng);然后,考慮預(yù)報模型殘差序列的時空相關(guān)性,利用半變異函數(shù)構(gòu)建經(jīng)驗?zāi)P停倍风姴钅P蛥?shù);最后,通過大量實驗對本文的優(yōu)化策略進(jìn)行驗證。
1 北斗超快速鐘差預(yù)報優(yōu)化策略
1.1 BDS-2/BDS-3聯(lián)合處理模型
在對北斗原始鐘差序列進(jìn)行嚴(yán)格預(yù)處理的基礎(chǔ)上,如粗差探測與修復(fù)和降噪等[16],可將超快速解算鐘差序列設(shè)為L,則鐘差模型可表示為[1,13,16]
(1)
式中,ti和k分別表示第ti個歷元時間和第k顆衛(wèi)星;a0、a1和a2為趨勢項(多項式)系數(shù);n為周期項總數(shù),j為第j個周期;Aj、Bj和Tj表示周期項振幅及其相應(yīng)周期大小;ε(ti)表示模型殘差項。
式(1)中,周期項通常采用快速傅立葉變換算法計算得到。因此,根據(jù)得到的周期項,相應(yīng)的鐘差模型誤差方程可表示為
(2)
式中,Lk為鐘差減去周期項結(jié)果。需要注意的是,傳統(tǒng)鐘差序列建模策略中[16-17],解算鐘差模型參數(shù)(趨勢項與周期項)分為2個獨立處理過程分別進(jìn)行平差估計;理論上單個模型的所有參數(shù)需經(jīng)統(tǒng)一解算得到。同時,由于星載原子鐘的特性存在差異,所有鐘差模型參數(shù)的個數(shù)和類型不可能表示為統(tǒng)一形式;因此,為獲得更精確的鐘差模型,有必要細(xì)化北斗鐘差模型參數(shù)。
首先,一步估計式(2)中所有模型參數(shù)。為提高計算效率,同時解算所有衛(wèi)星多項式參數(shù),假設(shè)有b顆衛(wèi)星、s個歷元,式(1)矩陣形式為

(3)
(4)
式(4)中,權(quán)矩陣P(t1)可表示為
(5)

rkb=
(6)
在鐘差模型參數(shù)估計中,有必要對權(quán)陣進(jìn)行調(diào)整,以提高預(yù)報模型的精度,本文在權(quán)陣中引入時間變量,即
(7)
式中,Δt表示相鄰歷元的時間間隔。式(2)~式(7),即為基于BDS-2/BDS-3星間相關(guān)性的北斗鐘差預(yù)報模型一步建模策略。
1.2 基于稀疏建模的鐘差模型估計
在1.1節(jié)的基礎(chǔ)上,鐘差模型參數(shù)估計考慮了衛(wèi)星間相關(guān)性,間接地優(yōu)化了模型參數(shù)求解過程。然而,參數(shù)估計中仍存在2個關(guān)鍵問題會導(dǎo)致待估參數(shù)無法獲得最優(yōu)解:1)由于建模中觀測值(鐘差序列)有限和模型過度擬合等因素影響,模型參數(shù)的穩(wěn)定性和精度不可避免地受到限制;2)不同類型星載原子鐘呈現(xiàn)出不同的特性(鐘差模型)[19],無法基于統(tǒng)一的模型進(jìn)行描述(相同的待估參數(shù))。為提高鐘差建模精度與穩(wěn)定性,有必要進(jìn)一步優(yōu)化北斗衛(wèi)星鐘差建模策略。
本節(jié)利用機(jī)器學(xué)習(xí)中稀疏建模的思想進(jìn)行鐘差模型精確構(gòu)建。理論上,引入所有的自變量進(jìn)行建模處理可有效提高建模精度,但同時也增加了模型復(fù)雜性并導(dǎo)致過度擬合。在實際應(yīng)用中,為了提高模型的可靠性與預(yù)報精度,必須考慮模型自變量的合理選取,即模型選擇(或變量選擇)[20-21]。通常,模型選擇只能在有限的備選模型范圍內(nèi)進(jìn)行,而稀疏建模可以有效地選擇建模數(shù)據(jù)與自變量(模型項),從而實現(xiàn)模型預(yù)報精度和計算效率的提升。為對北斗鐘差序列進(jìn)行稀疏建模處理,本文采用Tibshirani提出的最小絕對值收斂和選擇算子(Least absolute shrinkage and selection operator,Lasso)算法[22]。在Lasso算法中,通過最小化多變量線性回歸模型的損失函數(shù),對回歸系數(shù)絕對值施加約束,實現(xiàn)了參數(shù)估計和模型選擇同步進(jìn)行。根據(jù)Lasso算法原理,可實現(xiàn)對部分變量進(jìn)行壓縮和消除;Lasso算法的具體實現(xiàn)是通過L1范數(shù)的最小二乘法,即

(8)

(9)
式中,λ為正則化系數(shù)。等式右邊相當(dāng)于模型殘差平方和與正則化函數(shù)的組合;區(qū)別于Tikhonov正則化的L2范數(shù),L1正則化范數(shù)通過自動模型選擇達(dá)到稀疏性的同時,不失函數(shù)模型的凸性(產(chǎn)生少量特征)。為求解式(9),可通過迭代加權(quán)最小二乘法求解Lasso問題的數(shù)值解[23],即式(9)可表示為
(10)

(11)
式中,U(m)是權(quán)陣(對角陣),其元素根據(jù)第m-1次迭代解確定。因此
(12)
通過矩陣求逆公式,式(12)的解為
(13)
1.3 基于半變異函數(shù)的模型殘差處理
通過上述基于稀疏建模思想的一步求解鐘差模型參數(shù),可較好地實現(xiàn)北斗鐘差預(yù)報模型構(gòu)建。但是受模型殘差以及隨機(jī)噪聲影響,建模過程中需對模型殘差序列進(jìn)行深入分析。前期研究中,針對預(yù)報模型殘差序列提出了幾種改進(jìn)的處理策略[1,13];此外,學(xué)者組合了偏最小二乘法(Partial Least Square,PLS)和BPNN算法,并將其應(yīng)用于超快速鐘差預(yù)報中[14,17];但缺少衛(wèi)星鐘差精度的相關(guān)信息(方差-協(xié)方差陣),殘差序列建模及其預(yù)報難以達(dá)到預(yù)期精度[17]。本文從鐘差序列特點的角度考慮,即所有衛(wèi)星建模殘差序列不可避免地呈現(xiàn)時空相關(guān)性;因此,為充分挖掘BDS-2與BDS-3鐘差序列各衛(wèi)星潛在的時空特性,本節(jié)提出了利用半變異函數(shù)進(jìn)行殘差序列優(yōu)化處理。有關(guān)半變異函數(shù)的更多細(xì)節(jié)已在相關(guān)研究中進(jìn)行了詳細(xì)討論與總結(jié)[17,24-25]。
在實際建模處理中,通常使用改進(jìn)的殘差半變異函數(shù)模型[19,24]
(14)
2γ(ti,tl)=2(C(0)-C(ti-tl))
(15)
式中,C表示參數(shù)協(xié)變差運(yùn)算。C(tl-ti)可以通過式(16)計算得到
C(ti-tl)=Cov(ε(ti),ε(tl))
(16)
其中,Cov表示協(xié)方差運(yùn)算;模型殘差的時間相關(guān)性將由半變異函數(shù)進(jìn)行數(shù)值量化。
在得到每顆衛(wèi)星量化的殘差序列時間相關(guān)性之后,可擬合出經(jīng)驗半變異函數(shù)模型,如球形和指數(shù)型等。基于得到的經(jīng)驗半變異函數(shù)模型(如式(17)與式(18)),當(dāng)h→∞時,2γ(h)→2C(0);由式(15)可知,協(xié)變差C(h)可由經(jīng)驗函數(shù)模型確定。因此,在式(16)的基礎(chǔ)上可進(jìn)一步構(gòu)造參數(shù)估計的權(quán)陣,并將其代入式(3)中,從而實現(xiàn)模型系數(shù)估計的精化處理。
綜上,本文從星間相關(guān)性、稀疏建模以及半變異函數(shù)等3個方面對北斗超快速預(yù)報鐘差模型進(jìn)行了精化處理。首先,基于稀疏建模對鐘差模型參數(shù)進(jìn)行一步估計,實現(xiàn)了模型的自動選擇,并改進(jìn)了傳統(tǒng)鐘差分步建模策略;其次,考慮BDS-3星載原子鐘具有更強(qiáng)性能,通過提取星間相關(guān)性實現(xiàn)了模型參數(shù)的解算增強(qiáng);最后,針對模型殘差序列,利用半變異函數(shù)對參數(shù)估計隨機(jī)模型進(jìn)行了精化處理。
2 BDS-2/BDS-3衛(wèi)星鐘差預(yù)報實驗分析
本節(jié)將對改進(jìn)的BDS-2/BDS-3衛(wèi)星超快速鐘差聯(lián)合預(yù)報策略進(jìn)行實驗分析。實驗前,首先基于連續(xù)1個月(2019年第41~70天)的BDS-2和BDS-3觀測數(shù)據(jù)進(jìn)行超快速聯(lián)合定軌實驗,得到了解算的超快速衛(wèi)星鐘差產(chǎn)品。鐘差預(yù)報實驗中,根據(jù)本文提出的改進(jìn)策略,將實驗分為3組,分別從星間相關(guān)性、稀疏建模和半變異函數(shù)模型的角度對鐘差預(yù)報模型進(jìn)行驗證分析。考慮到北斗地球靜止軌道(Geostationary Earth Orbits,GEO)衛(wèi)星鐘差精度較低的特點,在實驗中剔除了相應(yīng)部分。
第1組實驗中包括4個對比方案,驗證了基于稀疏建模的鐘差序列一步建模策略:
方案1:基于趨勢項和周期項,建立鐘差預(yù)報模型,該方案中,趨勢項系數(shù)通過擬合鐘差序列得到,而周期項則通過殘差的快速傅里葉變換確定;
方案2:與方案1類似,其中BDS-2衛(wèi)星周期項參考黃觀文等[1]以及毛亞等[13]的研究結(jié)論,BDS-3則利用3個主要周期項建立鐘差預(yù)報模型;
方案3:與方案1和方案2相比,將快速傅里葉變換獲得的所有周期項加入鐘差序列建模中;
方案4:在方案3的基礎(chǔ)上,采用Lasso算法對模型參數(shù)進(jìn)行一步估計,以驗證稀疏建模的有效性。
根據(jù)上述四種方案分別進(jìn)行了1天弧長的BDS鐘差預(yù)報實驗,并以武漢大學(xué)iGMAS分析中心發(fā)布的BDS快速鐘差為參考進(jìn)行精度分析。各方案中BDS-2與BDS-3衛(wèi)星的鐘差建模殘差以及相應(yīng)預(yù)報精度如圖1和圖2所示。
通過上述4套對比實驗方案可知:1)BDS-3衛(wèi)星鐘差建模殘差明顯小于BDS-2衛(wèi)星,間接說明了BDS-3星載原子鐘性能優(yōu)于BDS-2;2)方案1與方案2的擬合殘差近似相等,而方案3中利用所有周期項建模得到的模型殘差最小;3)基于圖2中鐘差預(yù)報精度的統(tǒng)計結(jié)果,對BDS-2而言,方案3較傳統(tǒng)方法(方案1與方案2)預(yù)報精度有所提高,且方案4(一步建模)略優(yōu)于方案3(除C13外);對于BDS-3衛(wèi)星,方案3一步估計所得到的預(yù)報精度有所降低,但在稀疏建模之后(方案4),在方案1與方案2的基礎(chǔ)上,一定程度實現(xiàn)了預(yù)報精度的提高。

圖1 年積日41天(2019)不同北斗衛(wèi)星鐘差擬合殘差Fig.1 Fitting residuals of BDS clock offsets for different satellites on DOY 41
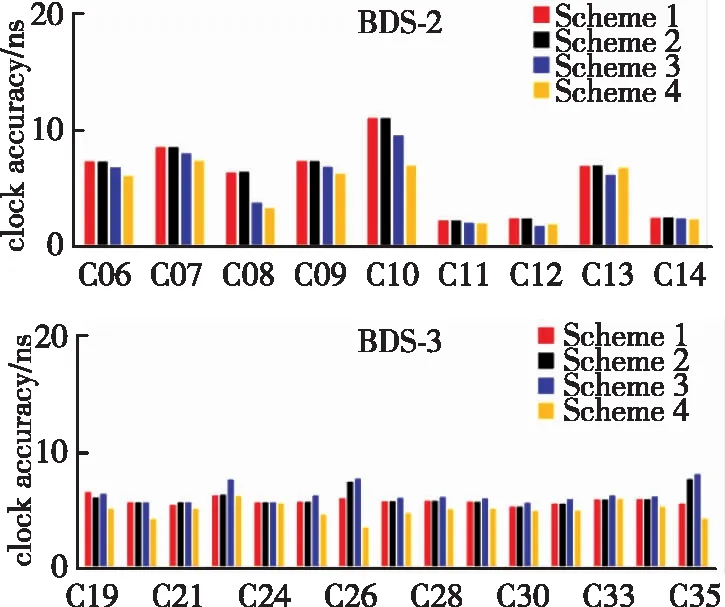
圖2 四種方案連續(xù)30天北斗鐘差預(yù)報精度(18h)平均值Fig.2 Average daily RMS values of BDS predicted clock offsets for different satellites in 30-day experiments with four schemes (18 hours)
第2組實驗包括2個對比方案,驗證了引入星間相關(guān)性求解模型參數(shù)的可行性:
方案5:類似方案1,但在模型參數(shù)求解中加入了星間相關(guān)性系數(shù),該方案具體實驗細(xì)節(jié)可參考作者前期研究成果[16-17];
方案6:同樣地,在方案4的基礎(chǔ)上,將獲取的星間相關(guān)性系數(shù)加入衛(wèi)星鐘差模型參數(shù)估計中。
圖3所示為連續(xù)10天C14與C24衛(wèi)星預(yù)報鐘差的精度;表1則給出了1個月鐘差精度平均值(18h)及其精度提升率。實驗結(jié)果表明,星間相關(guān)性可顯著改善北斗衛(wèi)星預(yù)報鐘差精度;且與傳統(tǒng)建模方法(方案1)相比,BDS-2與BDS-3衛(wèi)星鐘差預(yù)報精度分別提升了32.9%和16.9%;而方案4考慮了星間相關(guān)性后,BDS-2與BDS-3衛(wèi)星鐘差18h預(yù)報精度分別提升了27.2%與28.6%。
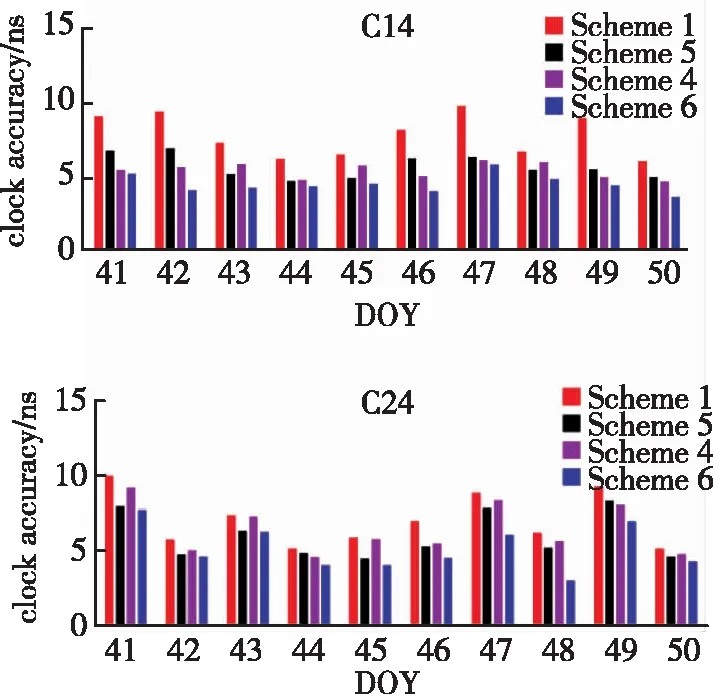
圖3 不同方案連續(xù)10天鐘差預(yù)報精度Fig.3 Prediction accuracy of clock offsets in 10 consecutive days for different schemes
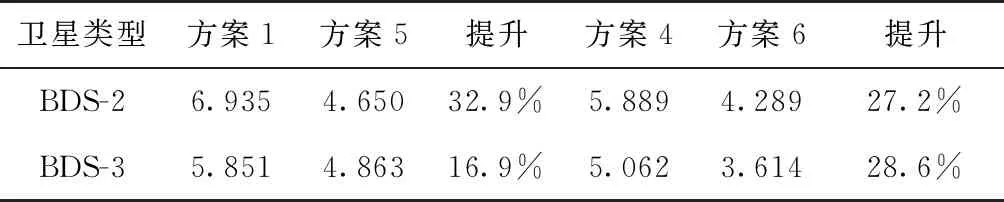
表1 不同方案北斗衛(wèi)星鐘差預(yù)報精度(ns)及其提升率(18h)
通過上述引入星間相關(guān)性與稀疏建模處理后,模型殘差中仍包含了鐘差序列的有效成分,其一定程度上降低了北斗鐘差預(yù)報的精度。第3組實驗主要分析了本文提出的超快速鐘差預(yù)報策略的正確性,并驗證了利用半變異函數(shù)精化模型參數(shù)估計的隨機(jī)模型的可行性。在鐘差預(yù)報實驗前,首先基于方案4中的模型殘差序列進(jìn)行時空相關(guān)性估計,結(jié)果如圖4所示,其中虛線表示基于1個月殘差序列計算的實驗半變異函數(shù)值;其次,構(gòu)建了一個經(jīng)驗?zāi)P停窗胱儺惡瘮?shù)模型,實驗中選擇球面模型進(jìn)行殘差半變異函數(shù)模型構(gòu)建,即如式(17)與(18)所示
γ(h)BDS-2=
(17)
γ(h)BDS-3=
(18)

圖4 BDS-2和BDS-3方案4鐘差殘差序列半變異函數(shù)Fig.4 Variogram from the satellite clock offsets residuals of scheme 4 for BDS-2 and BDS-3 satellites
方案7:基于BDS-2與BDS-3聯(lián)合超快速鐘差序列,考慮星間相關(guān)性,通過方案1進(jìn)行鐘差預(yù)報;
方案8:基于BDS-2與BDS-3聯(lián)合超快速鐘差序列,考慮星間相關(guān)性,通過方案2進(jìn)行鐘差預(yù)報;
方案9:基于BDS-2與BDS-3聯(lián)合超快速鐘差產(chǎn)品,通過方案6進(jìn)行鐘差預(yù)報,每個預(yù)報弧段長度為18h,并利用BPNN算法對模型殘差進(jìn)行處理與預(yù)報,最后將兩部分預(yù)報鐘差序列合并;
方案10:類似于方案9,針對模型殘差部分采用灰色模型進(jìn)行預(yù)報處理;
方案11:基于方案6,采用PLS+BPNN策略對模型殘差進(jìn)行建模與預(yù)報處理[24];
方案12:基于方案6,采用經(jīng)驗半變異函數(shù)模型計算的模型殘差協(xié)方差陣對式(4)中的權(quán)陣非對角線元素進(jìn)行更新處理,同時采用PLS+BPNN策略對模型殘差進(jìn)行建模與預(yù)報處理。
為對本文提出的改進(jìn)的鐘差預(yù)報模型進(jìn)行全面分析,將實驗中12個預(yù)報方案結(jié)果與WHU的快速鐘差產(chǎn)品進(jìn)行對比。為討論不同方案的鐘差預(yù)報精度,圖5中選取了6套方案中C14與C24衛(wèi)星對比分析建模殘差的差異,通過模型殘差可明顯發(fā)現(xiàn)方案11的建模效果最優(yōu)。

圖5 基于2019年第41天的C14和C24不同方案模型殘差Fig.5 Model residuals of different schemes based on DOY 41, 2019 for C14 and C24 satellites
同時,為具體說明方案7~12中不同實驗的鐘差預(yù)報精度,表2給出了不同方案下鐘差預(yù)報精度平均值。由于超快速鐘差產(chǎn)品以3h時延和6h間隔進(jìn)行更新發(fā)布[16],因此,鐘差預(yù)報結(jié)果中僅分析了1天內(nèi)18h的鐘差預(yù)報精度。
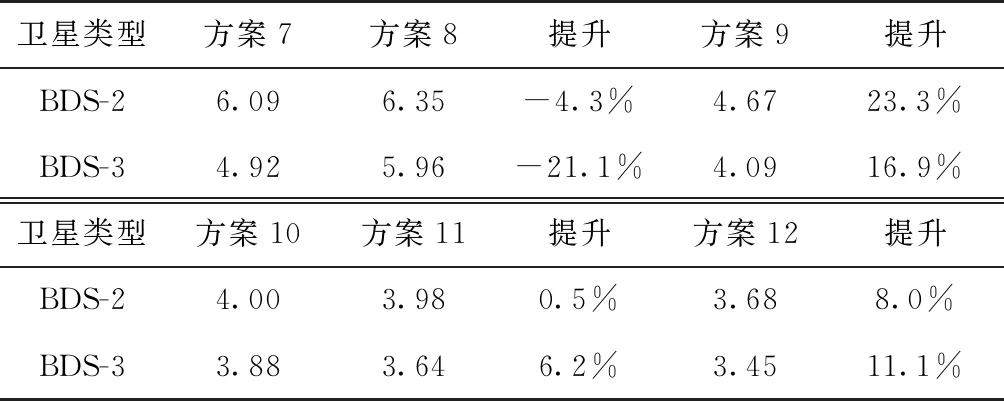
表2 基于傳統(tǒng)方法、星間相關(guān)性和Lasso算法的18h超快鐘差預(yù)報精度(ns)及不同方案提升率
基于圖5與表2中各方案的統(tǒng)計結(jié)果,可以得出:1)與方案2相比,考慮BDS-2/BDS-3衛(wèi)星鐘差相關(guān)性對模型殘差的影響不明顯;2)基于廣泛使用的周期項選取方法進(jìn)行鐘差建模,將導(dǎo)致BDS-2與BDS-3預(yù)報鐘差精度分別下降4.3%和21.1%;3)通過灰色模型對模型殘差進(jìn)行處理,BDS-2與BDS-3鐘差預(yù)報精度分別提高了23.3%與16.9%。需要說明的是,方案8是在傳統(tǒng)方法的基礎(chǔ)上進(jìn)行建模優(yōu)化處理,需對其模型殘差進(jìn)行補(bǔ)償。因此,實驗中設(shè)置了基于BPNN和PLS+BPNN算法的鐘差殘差序列預(yù)報方案。實驗結(jié)果表明,PLS+BPNN策略可實現(xiàn)模型殘差較傳統(tǒng)BPNN算法建模降低0.5%和6.2%。同時,由于模型殘差序列中存在時空相關(guān)性,在系數(shù)估計中引入半變異函數(shù)對權(quán)陣進(jìn)行精化處理,方案12較方案11可進(jìn)一步實現(xiàn)BDS-2與BDS-3預(yù)報鐘差精度分別提升8.0%與11.1%。
3 結(jié)論
本文基于前期研究,對BDS-2/BDS-3聯(lián)合超快速鐘差預(yù)報策略進(jìn)行了優(yōu)化處理,并通過3組共12套實驗方案進(jìn)行驗證,可以得出:
1)由于傳統(tǒng)鐘差模型的兩步求解過程存在精度損失現(xiàn)象,提出了一步估計模型參數(shù)(趨勢項和周期項)的策略;并引入機(jī)器學(xué)習(xí)中的稀疏建模方法對鐘差模型參數(shù)進(jìn)行自動篩選;基于鐘差預(yù)報結(jié)果可知,一步建模策略可略微提升鐘差預(yù)報精度。
2)考慮到BDS衛(wèi)星(BDS-2與BDS-3)的差異及星載原子鐘的特點,文中將星間相關(guān)性作為一種間接方法增強(qiáng)模型系數(shù)求解;結(jié)果表明,基于一步建模策略,通過引入BDS-2與BDS-3星間相關(guān)性,可實現(xiàn)BDS-2與BDS-3衛(wèi)星18h鐘差預(yù)報精度分別提升27.2%與28.6%;
3)在建立鐘差預(yù)報模型時,基于鐘差殘差序列,構(gòu)造經(jīng)驗半變異函數(shù)模型提取殘差序列中的時間相關(guān)性,并將其納入模型系數(shù)估計的權(quán)陣更新中。與已有文獻(xiàn)提出的方法相比[6,24],該策略可進(jìn)一步實現(xiàn)BDS-2與BDS-3衛(wèi)星鐘差預(yù)報精度分別提升8.0%和11.1%。
綜上,本文提出的BDS-2/BDS-3聯(lián)合超快速衛(wèi)星鐘差預(yù)報策略可改善分析中心北斗鐘差產(chǎn)品的精度。但是,本文改進(jìn)后的策略只基于1個月的實驗進(jìn)行測試分析,因此,針對BDS-2/BDS-3聯(lián)合超快速衛(wèi)星鐘差預(yù)報策略的可用性和準(zhǔn)確性還需進(jìn)一步研究和分析。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
