基于模糊控制的汽車自適應巡航系統跟隨工況的仿真
2020-09-24 03:24:50盧中德
科技視界 2020年26期
關鍵詞:規則
盧中德
0 引言
模糊控制是根據豐富的經驗知識和操縱經驗總結出來的、經過歸納總結形成的用自然科學的語言所表述的一種控制策略[1]。通過電腦,可以把專家知識經驗總結出來的模糊規則變成機器語言,從而實現對車輛的控制,并且使用模糊控制的理論進行控制器的設計時不需要清楚受控對象的精確數學模型[5]。
1 模糊控制器的設計
模糊控制系統主要有控制器FC,受控對象G 和反饋傳感通道H 組成[2],如圖1 所示。

圖1 模糊控制系統結構
文章構建以速度差和距離差為輸入,油門開度和制動力為輸出的自適應巡航控制系統的模糊控制器。模糊控制規則是對專家經驗總結而形成的語句。模糊規則庫由IF-THEN 結構組成[3]。

其中Ai為距離偏差比例量E1的模糊子集,Bi為相對速度比例量E2的模糊子集,Ci為踏板量的比例量U 的模糊子集[4]。
模糊規則庫的建立的原則是根據駕駛人駕駛習慣經驗的總結及專家經驗的總結來制定的[4]。文章中建立的兩個輸入量的隸屬度函數模糊子集是五個,可以得到二十五條模糊控制規則,如表1 所示。
圖2 為模糊規則輸出曲面,可以看出文章設計的模糊控制器輸出較為平滑連續,符合巡航系統的模糊控制器的使用要求。
圖3 為自適應巡航系統仿真圖,主要由自適應巡航控制器和車輛縱向動力學模型組成。輸入信號是速度差和距離差,輸出信號為車速,縱向動力學模型輸出車速反饋給自適應巡航控制器形成閉環控制。
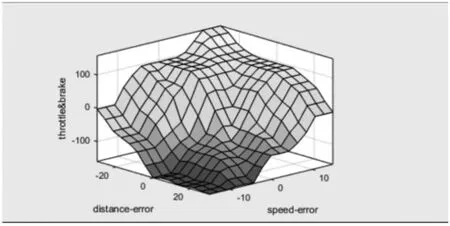
圖2 模糊曲面觀察窗口

表1 模糊控制規則表

圖3 自適應巡航系統仿真圖

圖4 跟隨行駛工況仿真曲線圖
2 跟隨行駛工況仿真
跟隨行駛工況是指自適應巡航車輛前方同一車道上有車輛切入本車道,而且切入行駛車輛的車速大于自適應巡航車輛的行駛速度,當自適應巡航車輛檢測到前方有車輛時,根據控制器計算兩車的安全行駛距離及巡航車速,控制本車安全跟隨前車行駛。初始距離用Sr 表示、安全行駛距離用Sa 表示,前車車速用表示Vp,巡航車速用表示Va。
仿真情景為:初始時刻t=0 s 時,Sa>Sr。這種行駛工況為巡航車輛速度小于本車道前方車輛的速度,初始時刻巡航車輛和前車之間實際距離小于安全距離。
仿真參數設定為:t=0 s 時,Vp=70 km/h,Va=60 km/h,Sr=26 m,Sa=27 m。仿真計算結果如圖4 所示。
3 小結
對仿真結果進行分析可以看出,文章中設計的模糊控制器能對目標車速進行控制,車速從60 km/h 到70 km/h 的控制過程中,速度變化平穩,沒有出現較大的超調量,控制效果較理想。在車距控制中,實際車距和理想車距沒有出現較大偏差,控制的距離較理想。綜述,本文設計的模糊控制器能夠較精確的控制車輛在跟隨行駛工況下的車速和車距。
猜你喜歡
作文周刊·小學一年級版(2022年28期)2022-05-30 10:48:04
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
法律方法(2019年3期)2019-09-11 06:26:16
中國外匯(2019年7期)2019-07-13 05:44:52
幸福(2018年33期)2018-12-05 05:22:42
環球飛行(2018年7期)2018-06-27 07:26:14
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
運動(2016年6期)2016-12-01 06:33:42
