基于Rodrigues參數交互模型航天器相對位姿測量技術
2020-09-26 00:57:50田九玲楊永菊
計算機測量與控制 2020年9期
田九玲,楊永菊
(1.河南工業職業技術學院,河南 南陽 473000;2.河南理工大學 測繪學院,河南 焦作 454003)
0 引言
近年來,我國在人工智能技術、機器人制造方面發展卓越,航天器研究方法越來越多,航天領域的發展水平代表著一個國家的科研技術水平,目前我國對航天器相對位姿測量研究越來越多,航天器的相對位姿測量結果對于航天器的運行和一些實驗結果有著十分重要的影響,即使相差一毫米,都會對航天器運行結果造成嚴重影響,所以加強對航天器相對位姿測量研究,減少誤差,增加航天器相對位姿測量的實時性和精度是當前研究的重要問題[1]。傳統的航天器相對位姿測量方法是視覺歐拉角法航天器相對位姿測量法,該方法需要進行大量的三角運算,其中涉及到的其他輔助領域的計算也十分多,如果其中一個步驟的數據出現偏差,整個測量結果就會出現誤差,所以它計算量大并且測量效率不高[2]。為了解決這一問題,本文將研究基于Rodrigues參數交互模型航天器的相對位姿測量技術。
Rodrigues參數交互模型航天器的相對位姿測量技術首先是利用羅德里格旋轉公式和四元數定理建立一個三維空間坐標系,然后在三維空間坐標系中對航天器的角特征和橢圓特征進行提取,最終提取出航天器的相對位姿的特征。根據相對位姿特征進行航天器的相對位姿測量。這種航天器相對位姿測量技術減少許多不必要的計算量,測量過程簡便,避免了實驗誤差的出現,是一種較為方便的航天器相對位姿測量技術。
1 基于Rodrigues參數交互航天器位姿采集模型
基于Rodrigues參數交互方法是基于羅德里格旋轉公式為基礎的參數交互方法[3]。目前羅德里格旋轉公式是計算三維空間中一個向量繞旋轉軸旋轉給定角度以后得到一個新的向量計算公式,這個公式剛好滿足航天器工作時的工作要求,公式使用原向量、旋轉軸、原向量和旋轉軸的交叉積作為標架表示航天器旋轉以后的向量組,增加四元數定理,減少計算航天器旋轉向量的計算量[4]。
羅德里格旋轉公式如下所示:
Rodrigues參數g=[g1;g2;g3]
T定義為g=tan(θ/2)n(1)
(1)
公式中n=[n1;n2;n3],T、θ分別為Euler軸上的單位矢量和繞n的旋轉角[5]。
觀察羅德里格旋轉公式參數的定義可以看出,當θ趨近于π時,g的模也就無線趨近于無窮大[6]。由于航天器的向量定義十分多,羅德里格旋轉公式的計算量十分大,所以本文加入四元數由于四元數q,對羅德里格旋轉參數g進行重新定義。這個時候計算輸入任何向量,都會輸出無限大的結果,不能進行向量換算[7]。所以本文在此基礎上進行優化的羅德里格旋轉參數計算方法。
設航天器本體坐標系相對于參考坐標系r(0)的羅德里格旋轉參數為g(0),將參考坐標系r(0)繞其第i(i= 1,2,3)個坐標軸旋轉π,得到的坐標系稱為參考坐標系r(i),本本文的坐標系相對于旋轉后參考坐標系r(i)的羅德里格旋轉參數記為g(i),則g(i)為:
g(0)=[q1/q4q2/q4q3/q4]T
g(1)=[-q4/q1q3/q1 -q2/q1]T
g(2)=[-q3/q2-q4/q2q1/q2]T
g(3)=[q2/q3-q1/q3-q4/q3]T
(2)
由定義q21+q22+q23+q24= 1可知道q1、q2、q3、q4四個向量不會同時為零,g(0)、g(1)、g(2)和g(3)的模就不會同時為無窮大,不會出現交互航天器輸出向量都為無窮大[8]。因此在一個給定時刻就可以利用g(0)、g(1)、g(2)和g(3)中遠離奇異點的那一個向量來描述交互航天器的相對位姿[9]。
基于羅德里格旋轉參數公式是通過左右攝像機采集三維空間內的航天器信息,通過觀察三維空間內的坐標系間的向量變化曲線規律,測量出交互模型的航天器相對位姿。基于羅德里格旋轉參數交互模型的左右攝像機系統是安裝在航天器外部,由兩臺測量攝像機和三維圖像采集器組成,三維圖像采集器把攝像機測量的結果發送到地面計算中[10]。其結構簡易、耗能小,具體模型簡化為三維空間坐標系如圖1所示。

圖1 基于羅德里格旋轉參數交互模型結構圖
圖1中的航天器的三角坐標系O0-X0Y0Z0、空間節點坐標系OP-XPYPZP、采集器坐標系OL-XLYLZL和OR-XRYRZR、抓捕目標坐標系OL-xLyL以及OR-xRyR和測量坐標系OM-XMYMZM[11]。三維空間的向量在左右兩個攝像機上成像,像點為pL和pR,每個攝像機的鏡頭光學中心OL和OR和像可以確定一條射線,兩條射線的交點就是被測量的航天器的相對位姿空間點[12]。
假設左采集器三角坐標系OL-XLYLZL為測量坐標系,右機坐標系OR-XRYRZR,fL、fR分別表示左、右太空攝像機的有效焦距。航天器的測量坐標系空間關系本文利用旋轉矩陣R和平移矩陣T表示,左、右向量的像點坐標分別為(xL,yL) 和(xL,yL),確定航天器p的三維坐標(X,Y,Z) 的相對位姿[13]。
其中R、T矩陣表示的是羅德里格旋轉參數交互模型的外部向量變化情況,通過兩個矩陣的實時變化,科研人員可以觀察航天器附近是否有不明物體,如果兩個矩陣發生不規則變化,科研人員就會對航天器附近進行勘察,防止航天器受到破壞[14]。
根據航天器的三維坐標(X,Y,Z) 的相對位姿表示公式可以得出,羅德里格旋轉參數模型與航天器的距離H和地面接收到的航天器相位位姿的誤差成反比,關系圖如圖2所示。
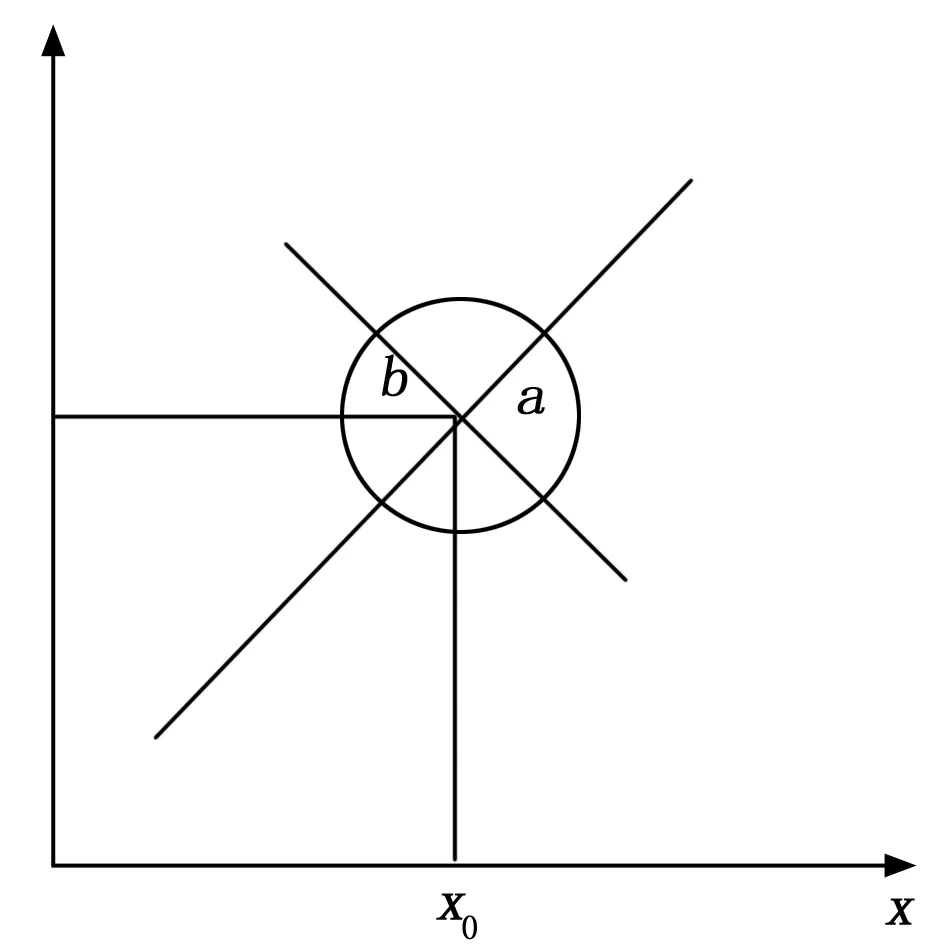
圖2 距離H和相對位姿的誤差圖
細小的距離會對航天器的相對位姿有很大的影響,所以控制好羅德里格旋轉參數模型與航天器的距離是航天器相對位姿準確測量的關鍵[15]。
2 航天器相對位姿特征提取
對航天器的相對位姿測量,其中最重要的是分析航天器的模型特征,常見的航天器模型如圖3所示。

圖3 航天器模型
近年來我國研究發明的航天器通常是由航天器附屬衛星、太陽能帆板、發動機噴嘴和星箭對接圓環與地面計算機的通信天線組成[16]。航天器附屬衛星多是以有規則的圓柱體、長方體、正方體為主,避免出現觀察不到的死角問題。太陽能帆板的作用是為航天器提供電能,維持航天器的正常工作,太陽能帆板通常為長方形和正方形。為了方便測量航天器的相對位姿,一般將太陽能帆板和航天器附屬衛星的形狀相同,這樣可以提供相同的角點特征。發動機噴嘴和星箭對接環都是圓形裝置,其主要作用是穩定航天器的內部運行。航天器的通信天線多是喇叭形狀的,由于通信天線在航天器的外部,通信天線是航天器相對位姿測量的關鍵,所以通信天線外有一層保護膜,防止通信天線發生軟化[17]。具體航天器相對位姿特征提取過程如圖4所示。
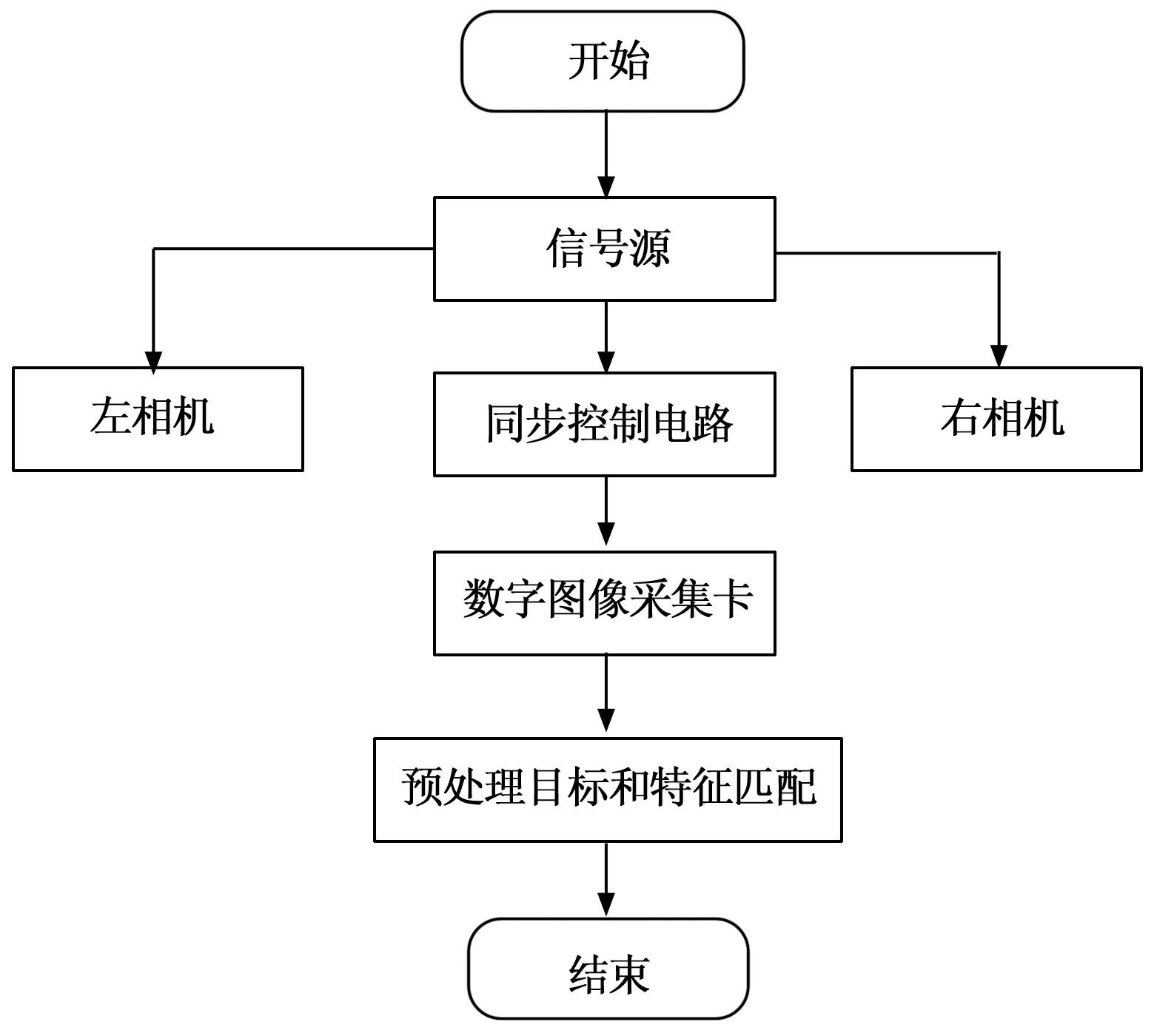
圖4 航天器相對位姿特征提取過程圖
為了方便航天器的相對位姿的測量,本文選擇的航天器附屬衛星和太陽能帆板都是圓形。如果進行遠距離測量航天器的相對位姿,通過提取太陽能帆板的角點特征,進行相對位姿的測量;如果進行近距離的相對位姿測量,提取航天器對接圓環的特征進行航天器的位姿測量[18]。
太陽能帆板的角點是三維空間中向量變化強弱的點。本文提取角點的特征是通過Harris角點檢測方法,計算航天器模擬圖像的每個像素和灰度,通過像素和灰度信息進行條件隨機場計算[19]。Harris角點檢測方法是利用航天器三維坐標系中的圖像灰度梯度是不連續的并且每兩個灰度梯度都是不相同的現象。由此定義一個函數矩陣M,當航天器處于角點處,那么三維坐標系中的向量的亮度信號就會增加,這時的矩陣的特征值就會很大,那么該檢測點就是角點特征處,如果現象相反,就不是特征角點處。建立函數矩陣,根據函數矩陣會計算3種結果,分別為:
1)提取的特征值很小,不是角點處;
2)提取的特征值很大,是角點處;
3)提取的特征值一個大一個小,角點在附近。
部分角點位置圖如圖5所示。
圖5 航天器角點位置圖
接下來航天器與地面計算機的對接圓環的特征提取也是航天器相對位姿測量的關鍵,對接圓環是橢圓形,在本文研究的羅德里格旋轉參數三維坐標系中,對接圓環的參數進行計算,得到的接圓環二維坐標系中的示意圖如圖6所示。
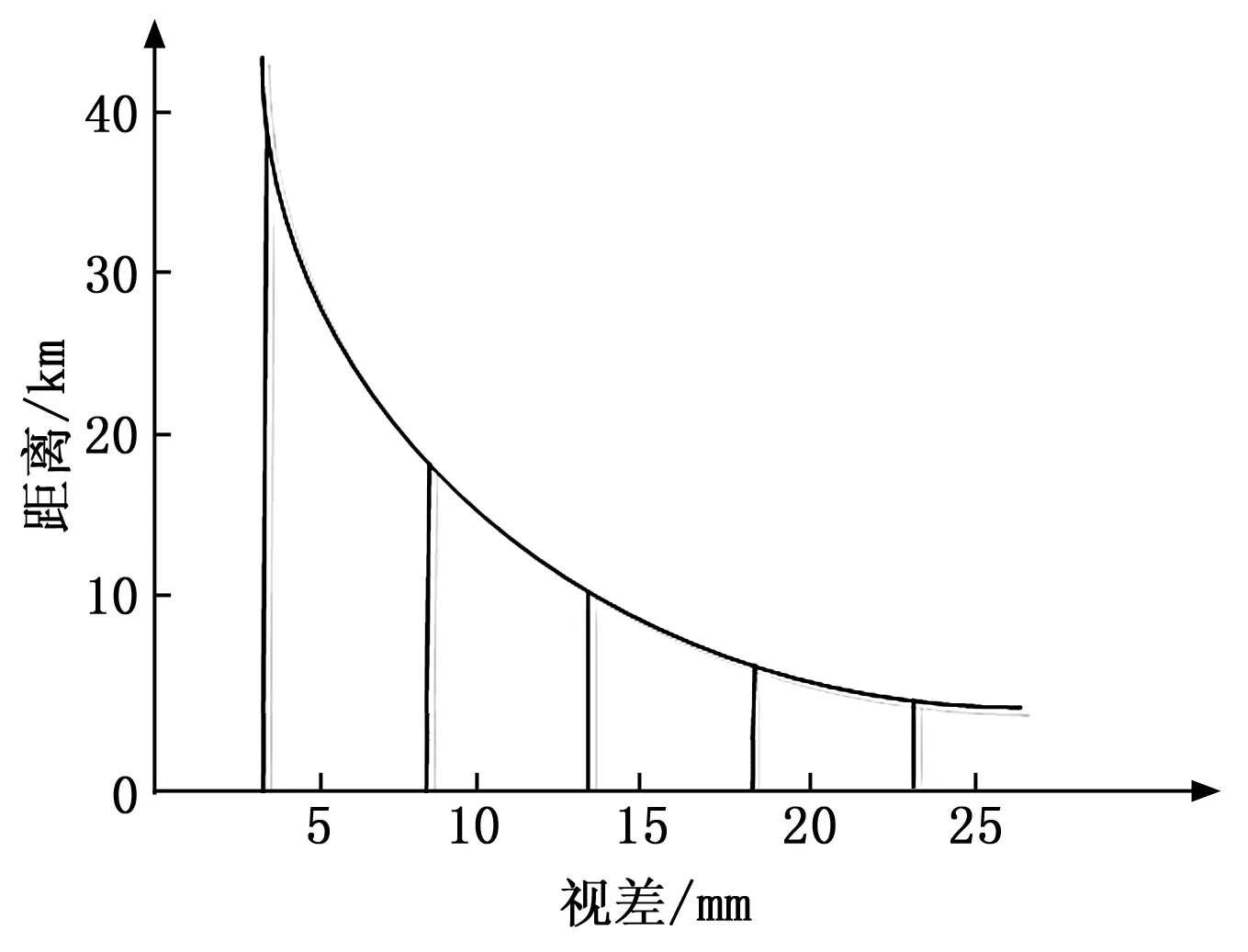
圖6 平面中任意橢圓的表示
觀察平面中任意的橢圓示意圖可以得到橢圓的中心位置(xc,yc),橢圓長半軸和短半軸。根據上文對接圓環的數學方程式,利用正態分布方法,計算出橢圓的最佳中心坐標點,這個坐標點就是對接圓環的特征點。
根據提取接圓環和太陽能帆板的特征,將兩個已知特征值帶入位姿解算法中求出航天器的位姿特征。因為對接圓環的圓面特征具有對稱性,所以本文可以求出航天器對接圓環上的5個位姿信息[20]。它們分別是3個坐標軸相關的位姿、俯角A和方位角。根據極限幾何原理,可以求出對接橢圓的極限方程。為了方便提取出橢圓航天器的相對位姿特征,本文將橢圓分為三個部分,即弧頂區、中間區、弧底區。具體平面示意圖如圖7所示。
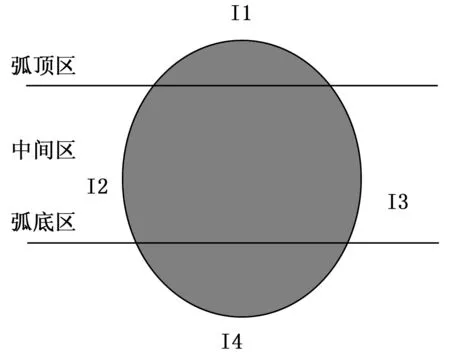
圖7 橢圓的分區結構圖
在橢圓的3個區域中,分別進行極限方程和相對應區域的約束條件進行匹配。根據三個匹配結果,取出相同特征量。將特征量帶入三維數學公式中,得出航天器的相對位姿特征。
3 基于Rodrigues參數交互模型航天器相對位姿測量技術
基于Rodrigues參數交互模型航天器相對位姿測量技術是通過尺度不變特征變換法,將上述提取到的參數特征進行特征重組化,尺度不變特征變換法將提取的角特征和橢圓特征與航天器模型在三維空間坐標系中的向量特征進行初始化匹配,通過在三維坐標系中查找相似的最近臨近點和次臨近點,進行合理匹配。如果角特征到向量的距離和橢圓特征到向量的距離的比值小于本文設定的參數,那么這個向量就是匹配的特征向量,若比值大于設定的參數,則不是匹配特征向量。為了精確航天器的相對位姿測量,需要匹配至少5個特征向量,具體測量流程圖如圖8所示。
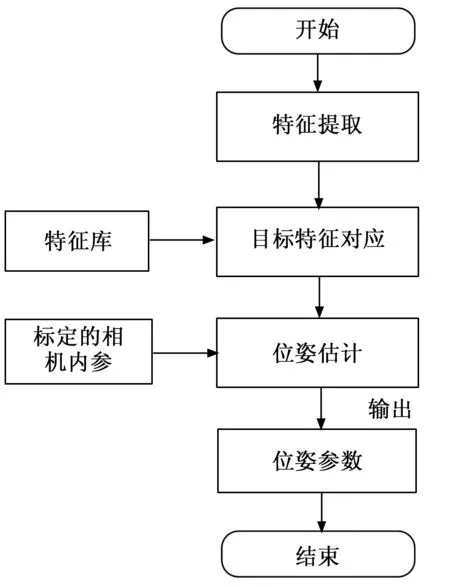
圖8 相對位姿測量流程圖
1)通過羅德里格旋轉公式和四元數建立三維空間坐標系;
2)通過數學公式提取航天器的角特征和橢圓特征;
3)將提取到的橢圓特征和角特征通過尺度不變特征法與航天器在三維空間坐標系的想進行航天器的相對位姿特征匹配;
4)將匹配到的航天器相對位姿特征向量通過Rodrigues參數交互模型航天器的相對位姿測量方法進行測量;
5)記錄測量結果,完成相對位姿測量。
4 實驗研究
4.1 實驗目的
為了驗證本文研究的基于Rodrigues參數交互模型航天器相對位姿測量技術比傳統的航天器相對位姿測量技術測量效果,進行實驗研究。
4.2 實驗過程
本文采用的基于Rodrigues參數交互模型的左右攝像機的分辨率為2 048× 2 048像素,像元寬度為7 μm,左右攝像機焦距為200 mm,左右攝像機成像和圖像處理過程中帶來1個像元的白噪聲誤差。本文模擬兩個相同的航天器為2 m× 2 m× 2 m的一個立方體,其8個頂點中對于攝像機可見的頂點作為特征點。同一時間開始航天器的相對位姿測量,兩組共8人記錄測量結果。最后根據人工智能AI技術對測量結果的準確性進行評定。
4.3 實驗結果分析
通過上文的實驗過程,每組測量結果每組由4個科研人員共同記錄,最終取平均值,兩種方法分為兩組,根據記錄繪成折現圖如圖9所示。

圖9 兩種技術的航天器相對位姿測量結果圖
觀察傳統方法的航天器相對位姿測量結果圖和基于Rodrigues參數交互模型的航天器相對位姿測量結果圖可以觀察到,基于Rodrigues參數交互模型的航天器相對位姿測量技術測量精度可高達99%,并且測量時間短。
觀察兩種方法的航天相對位姿測量結果圖可知,當測量時間為40分鐘時,基于Rodrigues參數交互模型航天器的相對位姿測量已經測量完畢,但是傳統的位姿測量才進行了一半。因為本文航天器的相對位姿測量技術的核心是航天器特征匹配,測量過程簡便,省去了很多計算過程,然而傳統的航天器相對位姿測量方法測量步驟很少,但是根據測量結果要進行大量的計算,并且一處計算結果失誤,整個航天器的相對位姿測量就是失敗的。在實驗32分鐘時,基于Rodrigues參數交互模型航天器的相對位姿測量方法時,測量精確度得到了大幅度提高,然后傳統航天器的相對位姿測量方法的整個過程是一個平緩的曲線,可能在測量過程中出現了意外事故,實驗無法進行前進,所以說明了本文方法具有高效性。
綜上所述,基于Rodrigues參數交互模型的航天器相對位姿測量技術更加完善,測量結果準確,測量時間短,具有高效性。
5 結束語
本文在傳統航天器相對位姿測量技術的基礎上,基于Rodrigues參數交互模型研究了一種新的航天器相對位姿測量技術。通過羅德里格旋轉公式和四元數定理定義Rodrigues參數交互模型的三維坐標系,繼而提取航天器設備的角特征和橢圓特征,根據兩個特征的相同特征向量,提取航天器的相對位姿特征,最后根據航天器的相對位姿特征進行相對位姿測量。經過本文實驗研究,表明基于Rodrigues參數交互模型航天器相對位姿測量技術測量的精準度比傳統技術高出25.88%。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學精密工程(2016年6期)2016-11-07 09:07:19