基于LabVIEW的電渦流檢測二維連續(xù)同步掃查系統(tǒng)設計
2020-09-26 00:57:56曹國華楊繼全
計算機測量與控制 2020年9期
關鍵詞:檢測
程 軍,李 晴,游 勇,徐 帥 ,曹國華,楊繼全
(1.南京師范大學 電氣工程及其自動化學院,南京 210023;2.南京師范大學 江蘇省三維打印裝備與制造重點實驗室,南京 210046)
0 引言
利用渦流法對大尺寸大面積的實際結構進行檢測,傳統(tǒng)的手持式探測方法[1]因其檢測速度慢、數據采集靈敏度低、檢測結果也不太準確,已經不能滿足當前的檢測要求,因此需要開發(fā)一種連續(xù)高速二維平面掃查系統(tǒng),以提高檢測效率。二維平面掃查通常采用電機驅動的位移平臺或掃查架實現,但是電機連續(xù)運動分為加速-勻速-減速3個階段,電機運行和數據采集時鐘不一致[2-3],采樣點和空間實際位置不匹配,造成圖像失真錯位無法判斷損傷位置[4]。基于此,本文基于位移平臺和編碼器開發(fā)連續(xù)掃查系統(tǒng),將電機編碼器的輸出脈沖作為數據采集卡的外部時鐘,消除了加速和減速運動對采樣的影響。利用LabVIEW 軟件實現了掃查系統(tǒng)的電機運動和數據采集的同步進行,實現了實時的渦流檢測成像,大大提高了檢測效率。
1 系統(tǒng)組成及工作原理
1.1 系統(tǒng)檢測原理
電渦流檢測是基于法拉第電磁感應定律利用探頭掃描來實現的[5],探頭主要包含激勵線圈和接收線圈。當通有交變電流的激勵線圈靠近導體時,導體內部會產生一個電渦流,在渦流的作用下會形成一個磁場,產生的電磁場會反過來作用于探頭的接收線圈。當導體內部出現損傷時,內部形成的電渦流會產生變化,因而反作用于接收線圈的電磁場也會發(fā)生改變,具體體現為接收線圈上感應電壓的變化。利用這個電壓變化,我們可以確定損傷區(qū)域的大小位置等信息,電渦流檢測原理圖如圖1所示。
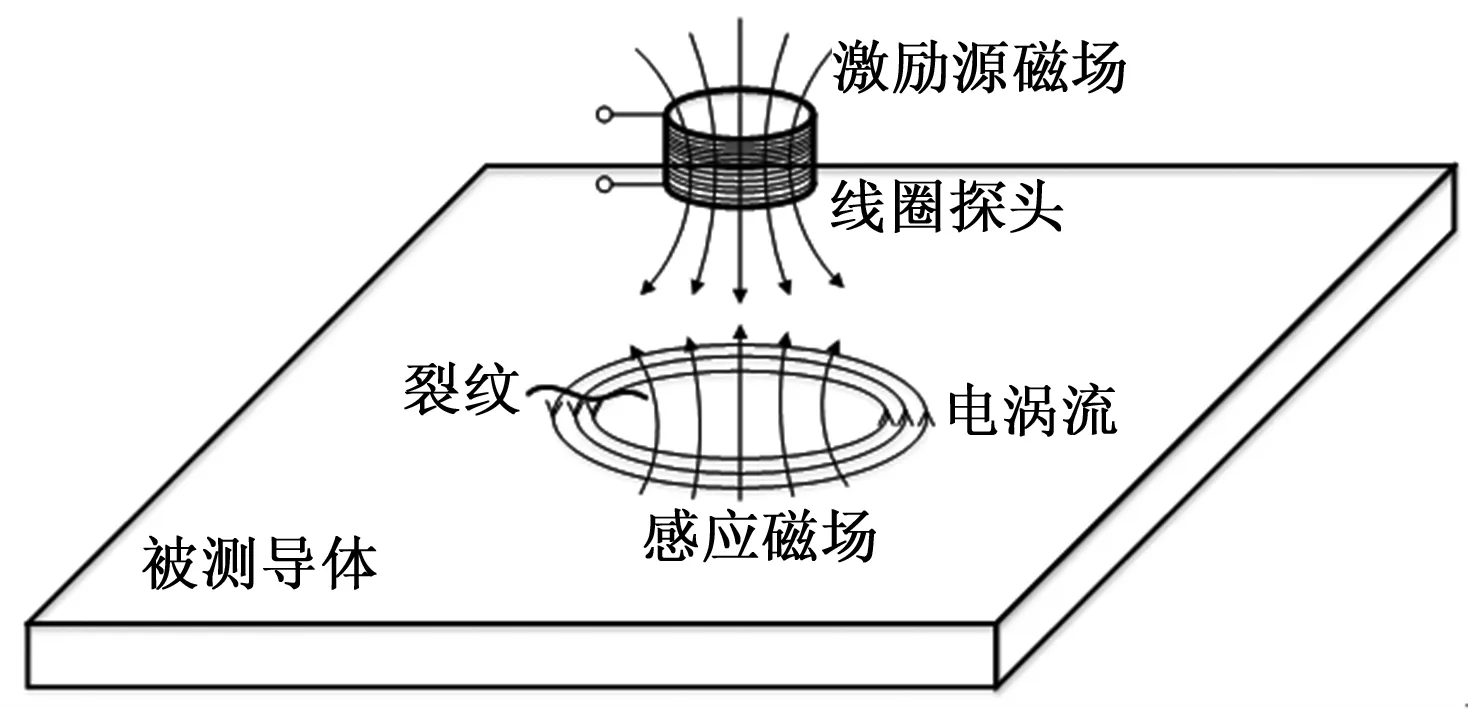
圖1 電渦流檢測原理
1.2 系統(tǒng)組成
渦流檢測系統(tǒng)可分為運動控制和數據采集處理兩個部分。運動控制部分主要包括控制器、驅動器、X-Y位移平臺。數據采集處理部分主要是信號發(fā)生器、功率放大器、鎖相放大器、數據采集卡。這兩部分配合上位機構成了一整套檢測系統(tǒng)[6],將信號發(fā)生器發(fā)出的信號利用功率放大器進行放大,并作為激勵線圈的激勵源。在上位機控制位移臺運動掃描導體的同時,利用鎖相放大器提取接收線圈的有效損傷信號,最后經數據采集卡采集數據進行數據存儲以及強度圖顯示,系統(tǒng)整體設計如圖2所示。

圖2 系統(tǒng)整體設計
2 連續(xù)同步運動采集控制
2.1 連續(xù)運動控制
連續(xù)運動控制主要是通過控制位移平臺運動實現探頭對檢測部件的連續(xù)掃查,該部分采用的是上位機+運動控制器的控制模式,通過上位機LabVIEW軟件并根據運動控制器的運動指令,編寫運動控制程序,完成對位移平臺的運動控制。
Visa庫中為用戶提供了串口配置、寫入、讀取、關閉等模塊,方便用戶調用。首先對串口進行參數配置,設置波特率、終止符、停止位等來編寫串口通信程序[7]。用戶通過上位機設置速度、加速度、定長距離等參數,經字符串轉化模塊轉化為十六進制字符串類型后,由Write模塊寫至緩沖區(qū),運動控制器從緩沖區(qū)讀取控制指令后實現位移臺的連續(xù)運動控制,最后關閉串口,避免程序執(zhí)行錯誤,具體運動控制串口通信如圖3所示。
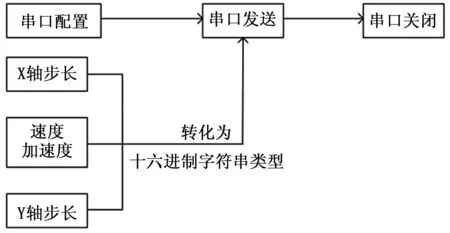
圖3 運動控制串口通信
對于以往的單點非連續(xù)運動采集,通常都是將每一行掃描行程根據采樣點數進行細分,細分的每段均為一個獨立的運動過程,由于采樣點數遠遠大于探頭的掃描長度,因而每一段細分的距離很小,探頭通常是還未加速到勻速階段便減速停止了,同時探頭每運動一段細分距離便進行一次數據采集。所以對于整行掃描來說,探頭的運動方式為非連續(xù)運動,數據采集方式為單點非連續(xù)采集,這種檢測方式掃描速度慢效率低,采集數據成像結果也不太準確。
本系統(tǒng)采用了平面連續(xù)掃描采集的方式。探頭每行掃描過程中,只經歷過一次加速運動、勻速運動、減速運動,而不是分成了很多個小的步進距離疊加而成,減少了加速和減速的運動過程,不僅加快了系統(tǒng)掃查效率,同時也減小了加減速對采樣的影響。探頭的運動路徑如圖4所示,X軸方向設定距離一次性運行至終點,此為去程,接著回程原路返回。當回到X軸原點后,Y軸定向運行設定距離,此為一個掃描周期,等待下一次掃描,重復此步驟,直到Y軸運行到終點,探頭返回原點位置完成掃描。
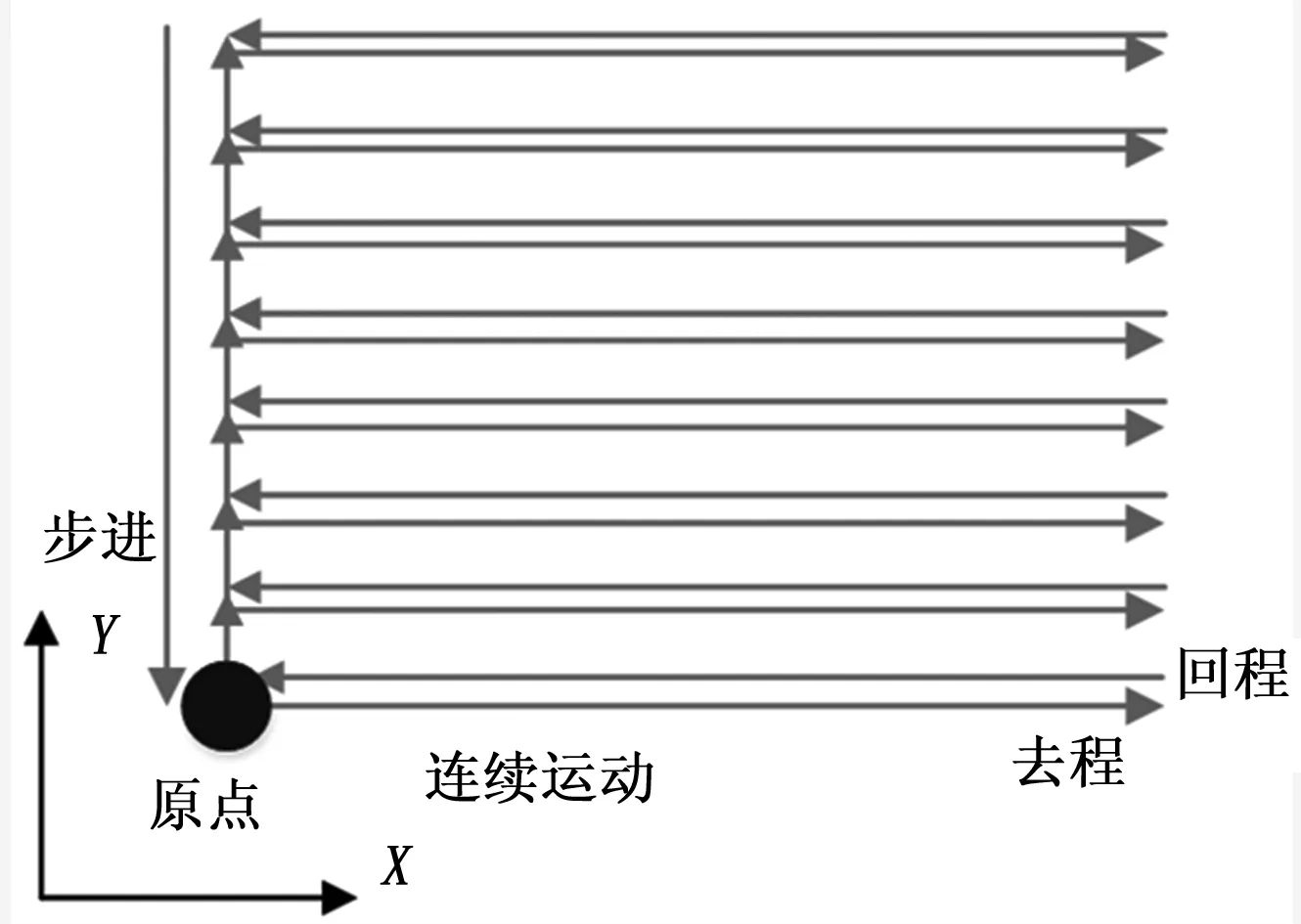
圖4 探頭的運動路徑
2.2 同步采集控制
同步數據采集控制,是探頭在加速勻速減速掃描情況下,將編碼器的輸出脈沖作為數據采集卡的觸發(fā)時鐘,采集鎖相放大器提取的有效損傷信號的同時,還能保證采樣點與空間實際位置能夠一一對應的一種控制方法。
編碼器固定在電機軸端與電機共軸旋轉,其碼盤上有很多透光狹縫,光源通過透鏡進行聚光。當電機帶動編碼器旋轉至光柵板狹縫與碼盤基片狹縫一致時,光源會透過狹縫照射到光敏元件,光敏原件根據光的有無會產生一個電信號,之后再轉化為脈沖信號輸出,其工作的原理[8]圖如圖5所示。

圖5 編碼器原理圖
考慮在探頭的運行過程中,電機有加速、勻速、減速旋轉3個階段。若采用數據采集卡內部晶振時鐘作為數據采集卡采集數據的觸發(fā)時鐘,由于數據采集卡內部晶振時鐘輸出的是一組均勻的方波,若在整個運動過程中均采用一組均勻的方波作為數據采集卡的觸發(fā)時鐘,當探頭處在加速運動或者減速運動階段時,與勻速運動階段相比,將會造成探頭在加速和減速掃描階段,數據采集卡采樣時鐘與電機運行時鐘不一致,以至于采樣點與空間實際位置不匹配,造成采樣數據成像結果與實際正確結果會出現錯位現象,從而不能正確判斷損傷部位。
若采用編碼器輸出脈沖作為數據采集卡采集數據的觸發(fā)時鐘,由于編碼器是每固定角度輸出一個脈沖,且編碼器旋轉一周輸出的脈沖總數固定,所以編碼器旋轉固定角度耗費時間在加速、勻速、減速階段也存在差異。探頭在整個運動過程中,加速和減速階段編碼器旋轉固定角度所需時間比探頭處在勻速運動階段所需時間更長,其輸出脈沖寬度比勻速運動階段編碼器輸出脈沖寬度更寬。
雖然在整個運動過程中,編碼器的輸出脈沖不是均勻分布的,但是每個脈沖對應的空間實際位置是均勻分布的。每一個上升沿對應相應的采樣點能與空間實際位置相對應,從而解決了因為加減速運動對數據采樣成像與實際成像出現錯位的問題,編碼器脈沖與采集卡內部采樣時鐘脈沖輸出示意圖如圖6所示。
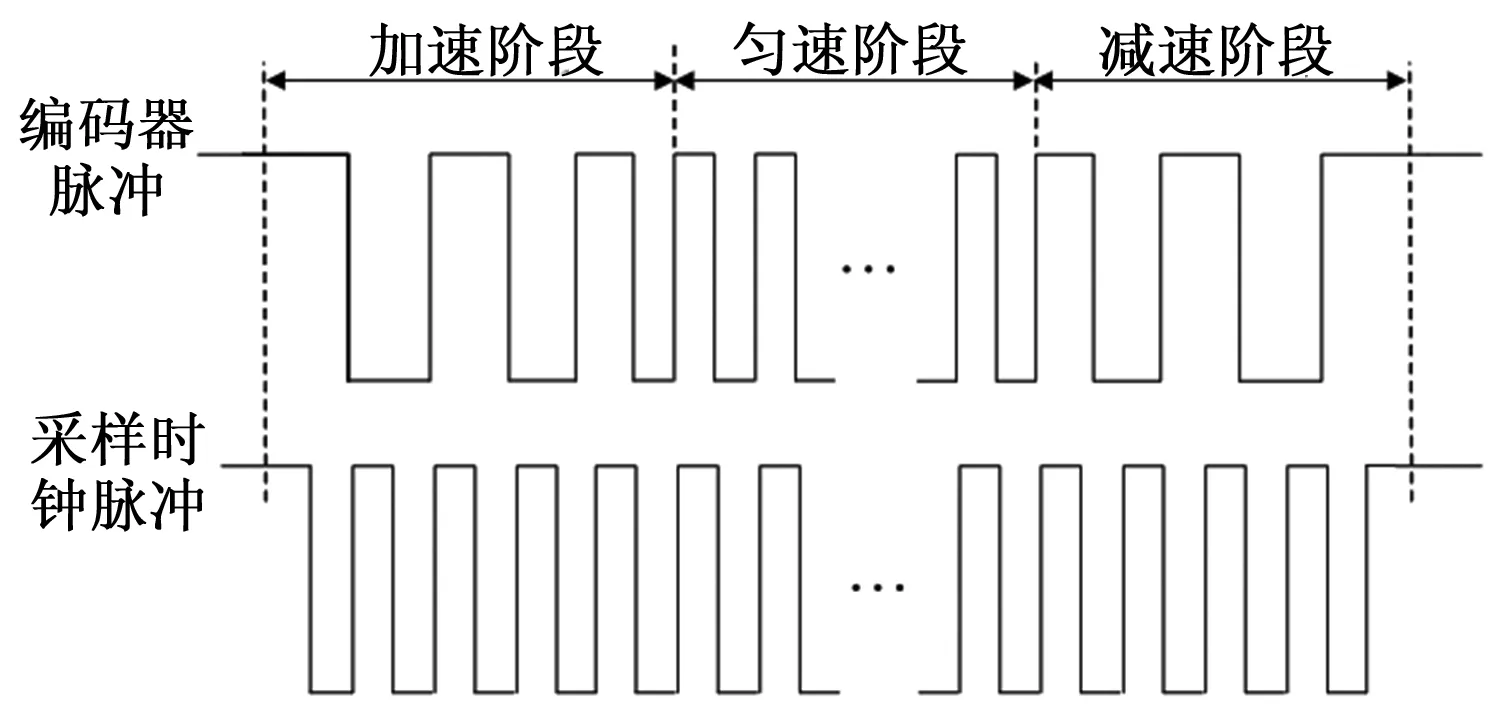
圖6 編碼器脈沖與采集卡內部時鐘
取編碼器A相進行檢測,得到電機在加速啟動和減速停止階段的編碼器輸出脈沖波形圖如圖7和圖8所示,電機加速啟動和減速停止時,編碼器脈沖不是均勻分布的,速度越小,每旋轉固定角度時間越長,脈沖寬度也就越寬。
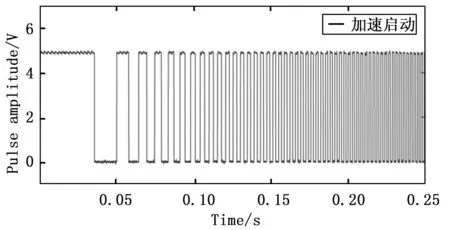
圖7 電機加速運動的編碼器脈沖
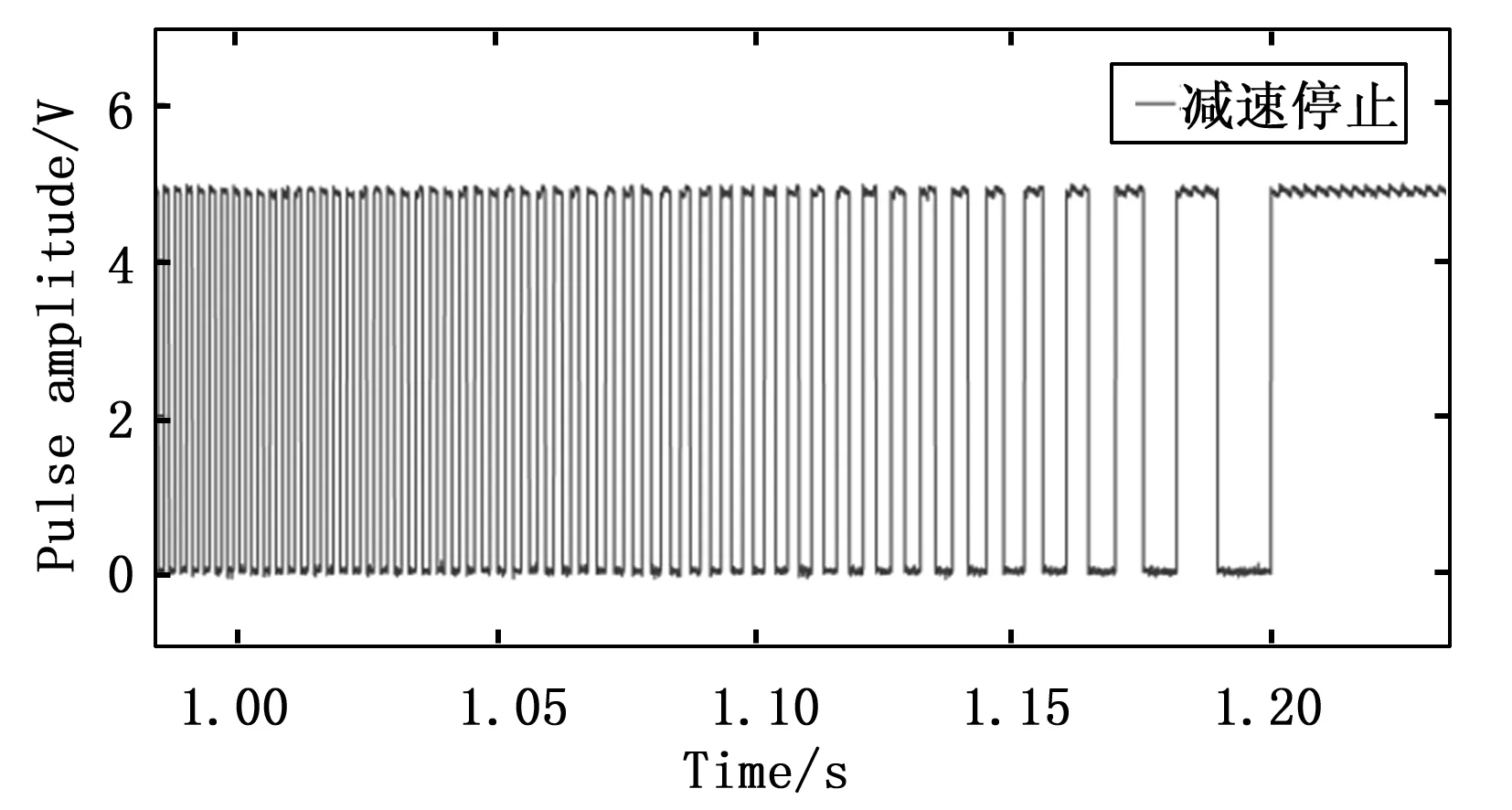
圖8 電機減速運動的編碼器脈沖
因而同步采集控制的同步性體現于,電機旋轉一個固定角度,編碼器發(fā)出一個脈沖,對應數據采集卡一個采樣點,不論電機是加速、減速還是勻速運動,編碼器的輸出脈沖能夠實時反饋探頭的位置信息。將編碼器的輸出脈沖作為采集卡采集數據的觸發(fā)時鐘,電機運行的同時,編碼器實時輸出電平信號,采集卡根據電平信號觸發(fā),可以實現在電機運行的同時同步采集數據,保證采樣點與空間實際位置相對應。
3 軟件程序開發(fā)與設計
上位機軟件主要負責探頭的運動控制,同時將數據采集卡采集到的數據進行存儲并實時顯示檢測效果的強度圖等。
3.1 軟件程序設計
整體LabVIEW程序框圖如圖9所示。在渦流檢測系統(tǒng)運行之前,設置硬件電路參數,即信號發(fā)生器發(fā)出的激勵源信號幅值及頻率,同時設定放大增益,接著利用鎖相放大器進行去偏置。關于軟件設計部分,首先進行串口配置,設定串口參數。根據掃描區(qū)域大小,設定相應的探頭運動參數、采樣點數。根據編碼器輸出,選擇采樣時鐘。根據控制器功能指令表,寫入相應的運動指令。在每次執(zhí)行循環(huán)結構時,首先外層循環(huán)都會對Y軸坐標進行判斷,判斷Y軸是否運行到終點,否則執(zhí)行回程動作并退出當前循環(huán)。內層循環(huán)除了判斷X軸是否運行到終點,是否執(zhí)行回程運動,同時在X軸運行過程中利用數據采集卡對檢測數據進行采集,實現數據同步采樣及存儲,并在上位機上實時顯示強度圖,最終Y軸運行到終點,掃描完成跳出循環(huán),探頭回歸初始位置,關閉串口關閉TDMS。
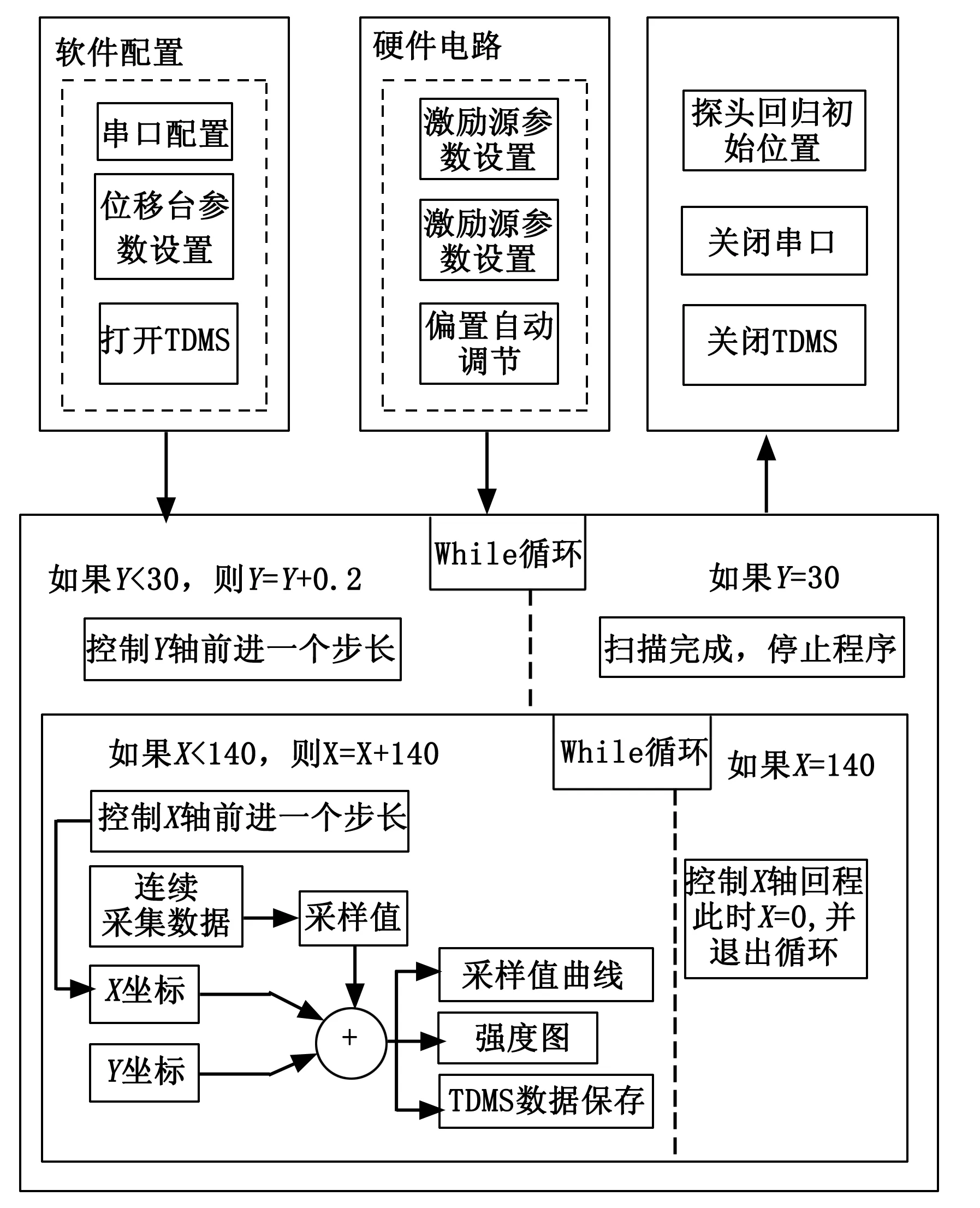
圖9 整體LabVIEW程序框圖
數據采集的LabVIEW軟件建模中,首先是調用函數配置物理通道、最大最小電壓,然后設定采樣時鐘源和采樣點數以及采樣率,最后對采集卡采集到的數據進行讀取并拆分得到實部虛部信號[10],其程序如圖10所示。

圖10 數據采集程序
3.2 上位機界面設計
用戶界面效果圖如圖11所示,主要分為兩塊,上半部分是檢測系統(tǒng)參數設置,主要有串口選擇、采樣點數、來回程延遲以及探頭的運動參數。下半部分為檢測效果強度圖的實時顯示以及采樣值實部虛部的波形圖顯示。
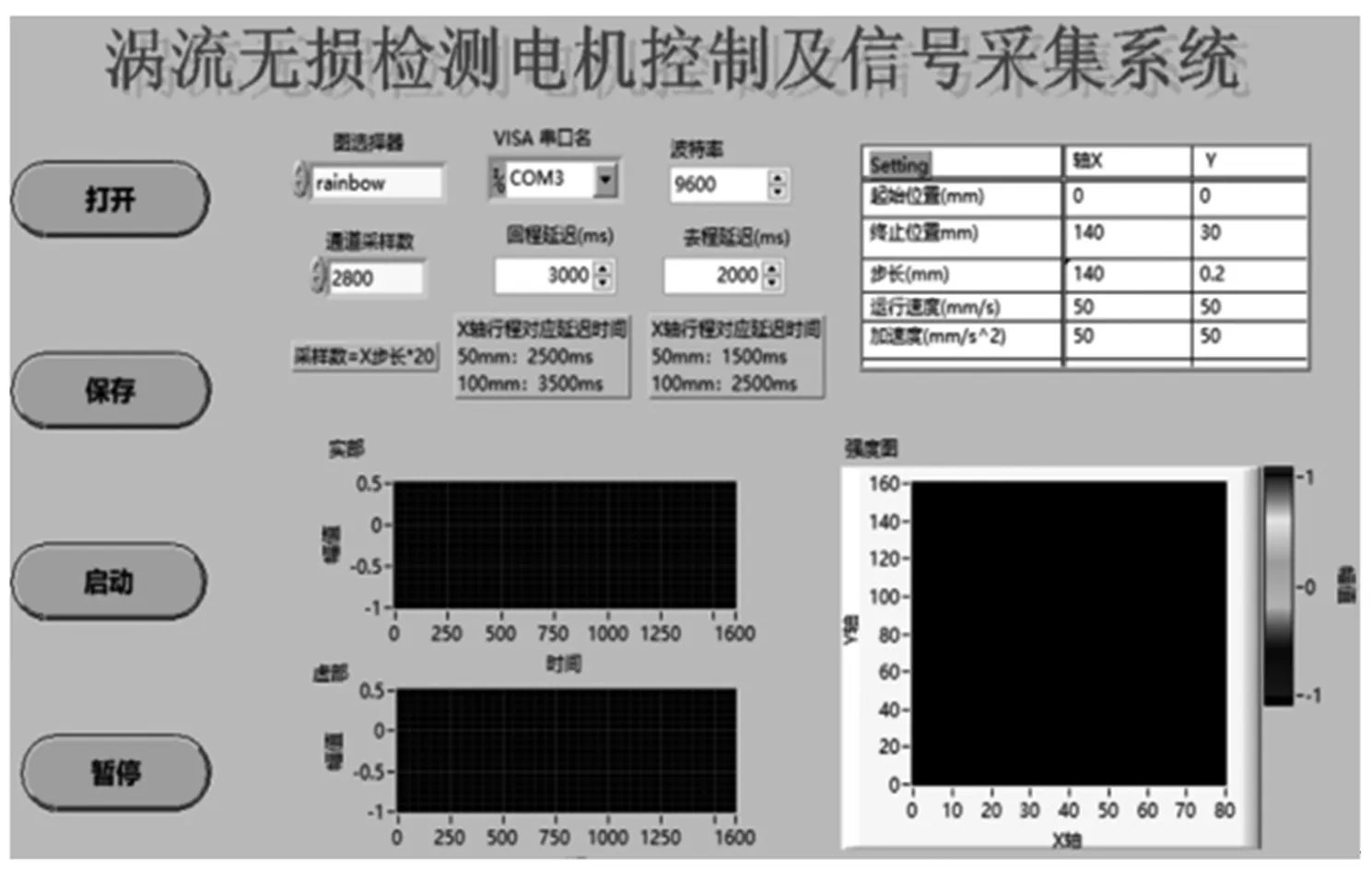
圖11 上位機用戶界面圖
4 實驗測試與評價
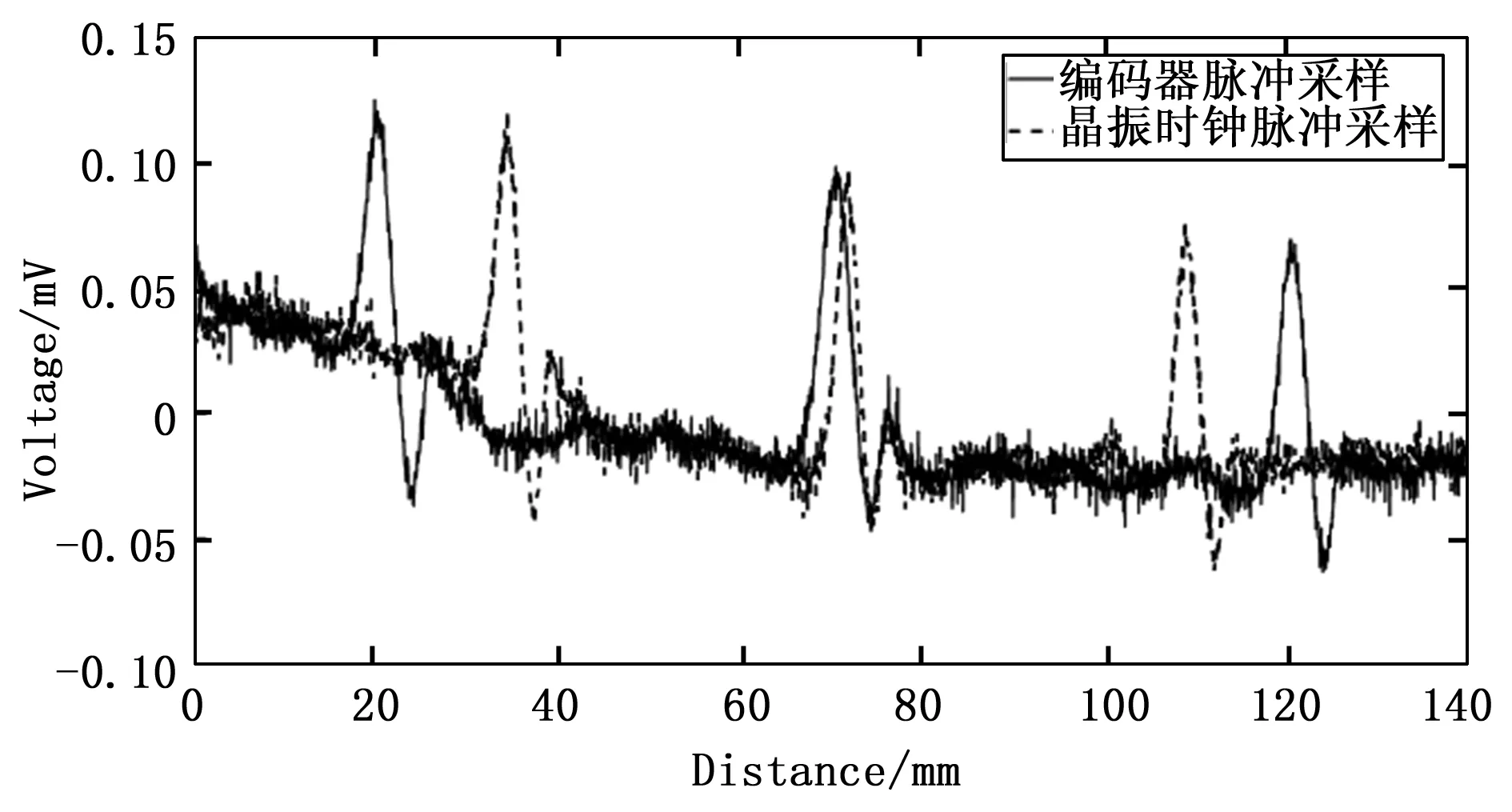
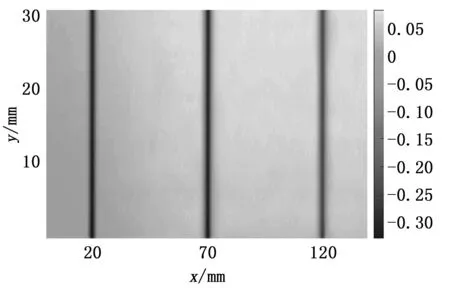
本實驗以不銹鋼鋼板為例,板的厚度為2 mm,多層板表面加工出三條不同深度的裂紋,其示意圖如圖12所示,每條裂紋間距為50 mm,從左往右裂紋深度依次降低。使用高頻電渦流掃查系統(tǒng)對損傷板進行掃描,設置掃描區(qū)域為0 圖12 實驗用不銹鋼鋼板示意圖 掃描結果波形圖如圖13所示,三條裂紋對應3個波峰,且裂紋越深對應的波峰值越大。當采用編碼器輸出脈沖作為數據采集卡的觸發(fā)時鐘時,波峰的位置與實際損傷位置能夠一一對應。而采用數據采集卡內部晶振時鐘作為數據采集的觸發(fā)時鐘時,在探頭處在加速運動或者減速運動階段,波峰值位置信息與實際正確結果有一個明顯的偏移。在探頭處在勻速階段,波峰值位置與實際損傷位置大體一致。因而采用編碼器輸出脈沖作為數據采集卡采集數據的觸發(fā)時鐘可以很好地解決因為電機運行與采集數據時鐘不一致造成的采樣點與空間實際位置不匹配的問題。 圖13 裂紋掃查波形對比圖 采用編碼器輸出脈沖作為數據采集卡采集數據的觸發(fā)時鐘得到的強度圖如圖14所示,掃查檢測的結果能夠清楚地看到三條裂紋的位置信息,且成像的裂紋位置與實際裂紋位置基本一致。 圖14 裂紋檢測圖像強度圖(編碼器脈沖采樣) 采用數據采集卡內部晶振時鐘作為數據采集卡采集數據的觸發(fā)時鐘得到的強度圖如圖15所示,成像結果的裂紋位置與空間實際裂紋位置有一個明顯的偏移,因而無法準確判斷損傷部位的位置信息。 圖15 裂紋檢測圖像強度圖(采集卡內部時鐘采樣) 本文利用編碼器配合位移臺,基于渦流檢測原理,實現了對不銹鋼鋼板的二維平面連續(xù)掃查。通過對電機連續(xù)運動過程中編碼器的輸出脈沖與晶振時鐘脈沖進行研究,并分別將其作為數據采集卡采集數據的觸發(fā) 時鐘,設計了電渦流檢測二維連續(xù)同步掃查系統(tǒng)。通過對不同觸發(fā)時鐘得到的實驗結果與實際不銹鋼板進行比較,證明了采用編碼器脈沖作為數據采集卡采集數據的觸發(fā)時鐘的可行性。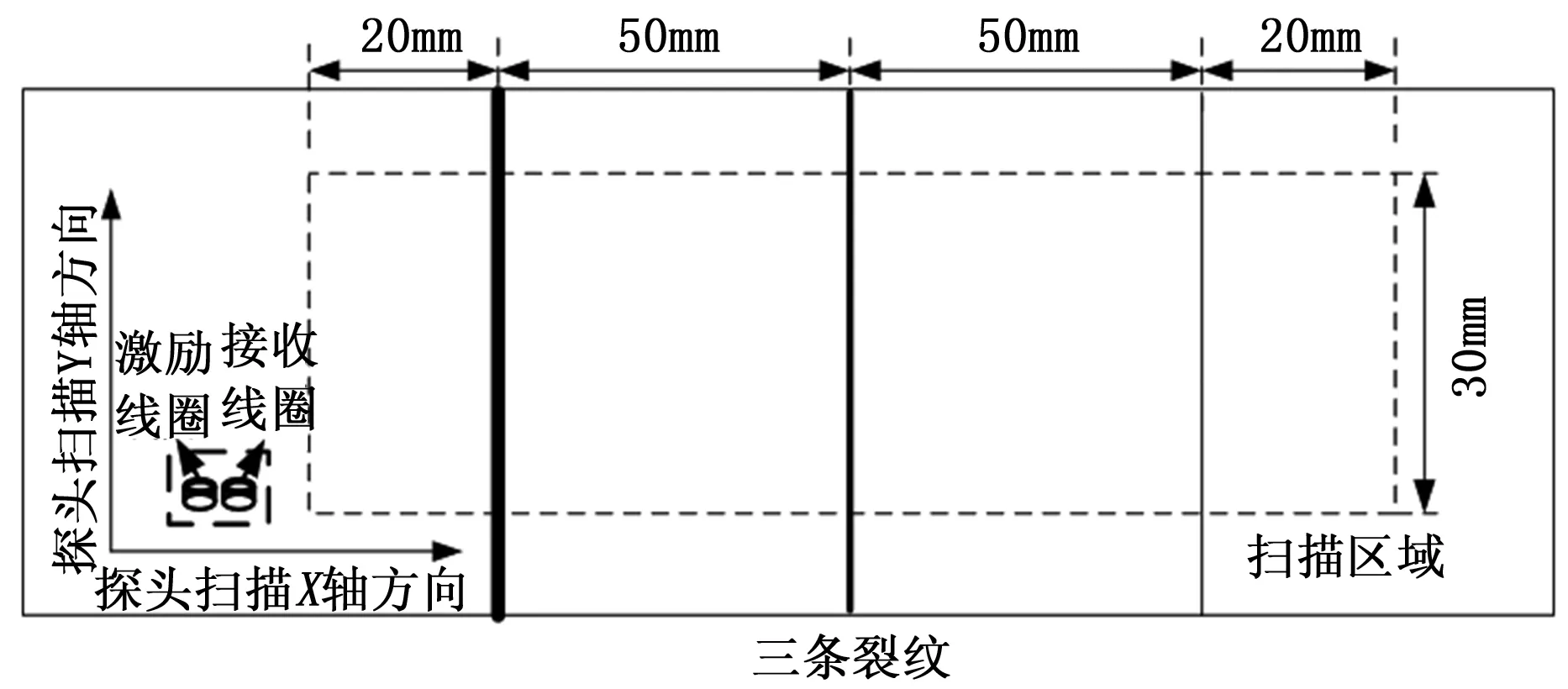

5 結束語
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48