GNSS輔助偽衛星系統定位初始值濾波算法與二階數字濾波器設計
2020-09-26 09:51:44樂樂
江蘇理工學院學報 2020年4期


摘? ? 要:全球衛星導航系統(GNSS)輔助地基偽衛星定位的主要目的是解決工程實際應用中的一些問題。在地基偽衛星應用于碼頭港口等環境較為復雜的場景時,因為基站距離地面較近,多徑現象較為嚴重,給固定整周模糊度帶來了困難,無法得到準確的初始值。以GNSS與慣性導航系統組合定位模式為參考,對GNSS輔助偽衛星系統定位初始值的工作方案進行了研究,比較了算術平均值濾波、中值濾波等常用一階數字濾波器的優缺點,并通過分析多組GNSS靜態定位的誤差,設計了一種二階數字濾波器。試驗結果表明,二階濾波器的濾波效果達到了偽衛星初始值定位的精度要求,能夠在工程上解決偽衛星的初始值問題。
關鍵詞:GNSS輔助偽衛星系統;慣性導航系統;初始值;二階數字濾波器
中圖分類號:TN713;TP273? ? ? ? ? ? ? 文獻標識碼:A? ? ? ? ? ? ? ?文章編號:2095-7394(2020)04-0036-07
慣性導航系統(Inertial Navigation System,INS,簡稱“慣導系統)是本世紀初發展起來的導航技術,具有自主性強,不受環境、載體本身的運動和無線電的干擾,可輸出全部導航參數,實時數據更新率高,短期的精度和穩定性出色等特點。[1]由于慣導系統的這些優點,加上高精度的慣導設備的價格逐步降低,其目前已被廣泛應用于航空、航天、航海等領域。INS的工作模式主要是通過高精度陀螺儀傳感器得到的加速度和角速度積分獲取位置、速度、姿態等參數,這些參數的誤差會隨著導航時間的延長而累積,經過一段時間后變得完全無法使用。而全球衛星導航系統(Global Navigation Satellite System,GNSS)的誤差不會隨著時間的延長而變化,而且在GNSS信號受到遮擋時,短時間內慣導系統可以提供精度足夠的定位結果。因此,GNSS與慣導系統的組合成為許多慣導系統提高自身性能的選擇。
根據使用的觀測值以及GNSS與INS相互輔助關系的不同,GPS/INS的組合模式主要分為三種:基于GNSS導出的位置速度的松組合、基于GNSS原始觀測值的緊組合和INS輔助GNSS的深組合。[2]松組合是GNSS與INS最簡單的組合模式。INS與GNSS各自獨立工作然后將導航的位置差和速度差作為組合濾波的輸入函數。松組合方式的優點是結構簡單易于實現,可以提高定位連續性和穩定性。但若長時間無法接收到4顆GNSS衛星,則無法得到GNSS的導航信息來對濾波器進行更新,整體導航性能就會累積誤差而變得很差。緊組合模式相比松組合是一種相對復雜的組合模式,它在GNSS可見衛星數目少于4顆但不少于1顆的情況下,仍可輸入觀測值到濾波器進行更新,從而限制INS的誤差積累,擁有更好的定位精度和穩定性,因此更加適合城市、峽谷等衛星容易遮擋的應用場景。不過緊組合定位需要建立比松組合更加復雜的系統模型和觀測模型,計算量更大,濾波器的收斂速度會較慢。深組合則使用INS輸出經過修正的導航參數來輔助GNSS跟蹤環路,是一種在硬件層面更深層次的組合方式,具備強大的動態性能和抗干擾能力,更多用于軍事領域。
GNSS/INS作為GNSS輔助其他定位系統的一個典型應用,對GNSS輔助地基偽衛星的初值定位的組合模式起到了參考作用。GNSS輔助偽衛星初始值定位的精度會直接影響偽衛星后續定位的精度,在設計定位初值的組合模式時,需要采用數字濾波器提高初始值的精度,進而提高整個系統的定位精度。筆者擬在比較算術平均值濾波、中值濾波等常用一階數字濾波器優缺點的基礎上,設計一種能滿足偽衛星初始值精度要求的二階數字濾波器,并在試驗平臺比較驗證其有效性。
1? 偽衛星初始值
GNSS和偽衛星系統實現高精度定位的關鍵技術就是載波相位整周模糊度的固定。只有正確獲取模糊度的整數解,載波相位觀測量才可以成為用于定位解算的高精度測量值。[3]整周模糊度的求解通常分為兩步進行:(1)通過一定的算法求解出整周模糊度;(2)驗證所得到的整周模糊度的準確性。GNSS的整周模糊度有多種方法用于固定,常用的靜態觀測法是將接收機放在一個固定的位置上,經過多歷元的觀測,當觀測量達到一定程度就可通過載波相位觀測方程實現對整周模糊度的計算。靜態觀測法的運用需要建立在衛星不同歷元的運動使得構建的載波相位方程不共線的基礎上。由于偽衛星的基站是固定不動的,幾何多樣性不足,因此無法使用靜態觀測法進行整周模糊度的固定。另一種GNSS解決整周模糊度的在航解算法,因為偽衛星的基站距離地面高度不高,多徑效應比GNSS嚴重很多,使得整周模糊度的固定極為困難。由于這些原因,工程應用中地基偽衛星系統通常采用靜態初始化法(Known Point Initialization,KPI)來固定整周模糊度。
1.1? 靜態初始化法
靜態初始化法(Known Point Initialization,KPI)是接收機在地面固定且基站固定不動的前提下,測定接收機的具體坐標,計算出接收機與基站的距離,并帶入觀測方程解出整周模糊度的方法。為了消除接收機的時鐘誤差,地基偽衛星使用了單差分技術。在式(1)和(2)中,對流層誤差通過了一個校正模型來擬合,假設以接收機接收基站[i]的信號作為參考信號,接收到節點[j]的為另一組信號,則單差分方程由式(1)與(2)相減所得,如式(3)所示。
假設接收機在[t]時刻的坐標為[xut,yut,zut,]兩個基站的坐標分別是[xi,yi,zi,][xj,yj,zj]。式中[ρij]代表距離差,如式(4)所示。
其中:[ΔNij]表示單差模糊度,[τijt]表示對流層延時的差值,[v=εi-εj]是噪音誤差的差值。接收機的坐標是已知的,所以當忽略噪聲和使用模型修正過對流層誤差后,可以算出[ΔNij],如式(5)所示。
由式(5)可以看出,當測定的接收機坐標越接近真實值,解算出的整周模糊度就越準確,偽衛星的定位精度也就更高。所以,一個高精度的初始值是地基偽衛星系統性能的保障。在應用中,偽衛星的初始值也都是經過精確測量后輸入系統的。
1.2? ?初始值的獲取
在工程實際應用中,每次定位前都人為地對接收機的精確坐標進行測算,是不符合工程實際需求的。因為接收機的位置不一定方便進行測量,而且每次使用都進行初始值的測量也影響產品的使用體驗。參考GNSS/INS組合定位模式,GNSS輔助INS可以很好地彌補INS隨著時間的增加誤差不斷累積的缺點,提高系統的精度。在地基偽衛星的應用中,GNSS的多徑效應沒有地基偽衛星嚴重,整周模糊度的解算難度相較偽衛星成功率更高,而且GNSS短時間內的靜態定位精度可以達到厘米級。因此,可以利用GNSS測定地基偽衛星接收機的位置,對測定的多組數據進行數字濾波后作為地基偽衛星的初始值輸入系統,最終解算出地基偽衛星的整周模糊度,讓地基偽衛星成功開始定位。給定初始值后,即使GNSS出現可見星數不足導致精度不夠的問題,也不會影響偽衛星的精度。而且在組合定位成為地基偽衛星研究重點的現在,系統融合GNSS不會在工程上有困難。所以,GNSS輔助地基偽衛星獲取初始值可以成為一個符合工程實際應用的解決方案。
2? ? GNSS輔助偽衛星初始值定位方案
2.1? 組合方式
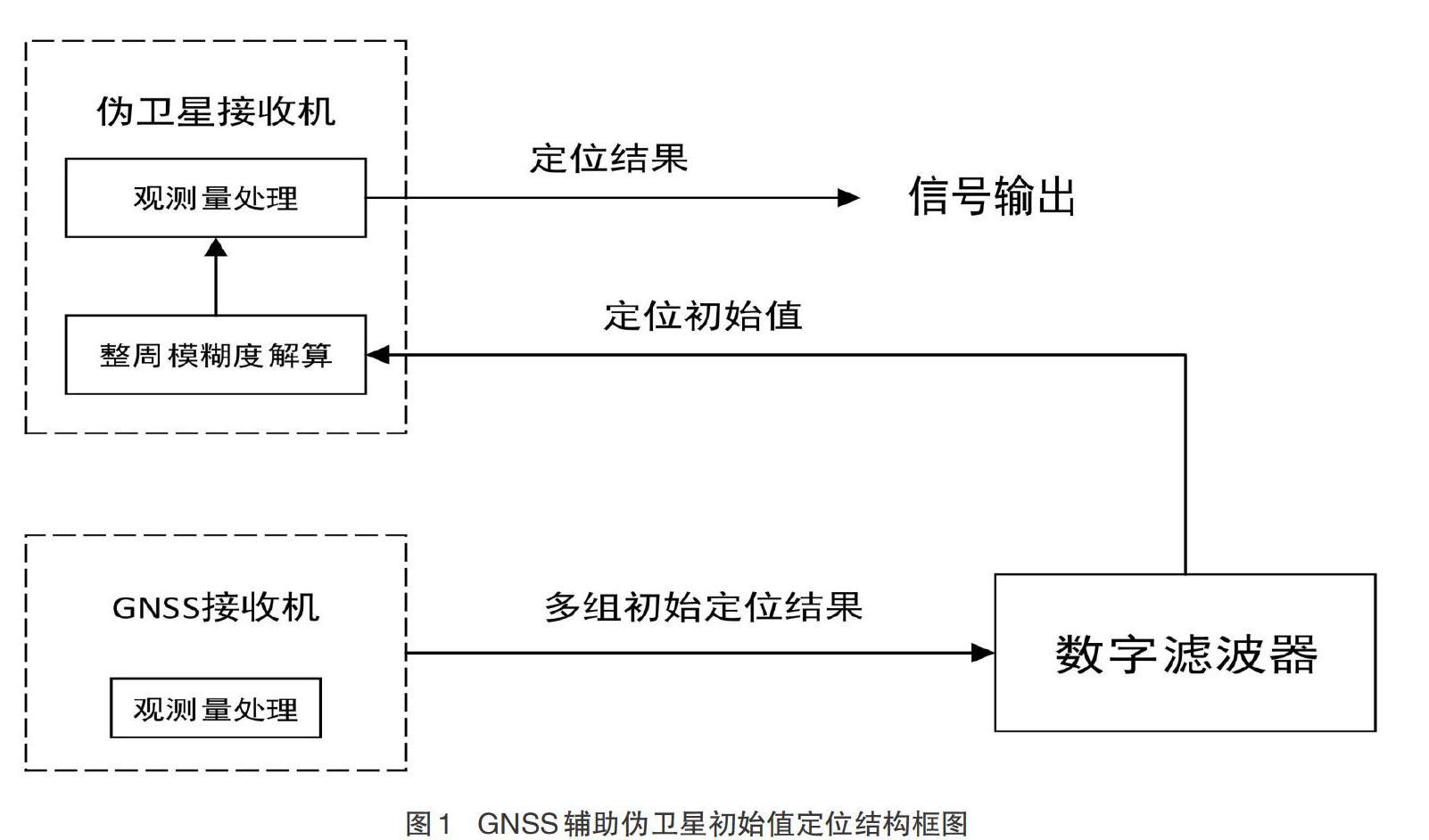
在確定了GNSS輔助偽衛星的方案后,對GNSS與地基偽衛星定位初始值的組合模式進行了設計。組合方式如圖1所示。
GNSS輔助地基偽衛星初始值定位過程需要在系統運行之后,先保證偽衛星接收機處于靜止不動的狀態;偽衛星系統會等待GNSS發送定位初始值和可開始定位的標志位;在GNSS獲取到足夠多的定位初始值之后,將多組數據輸入到數字濾波器進行處理,再將濾波后的結果和可開始定位的標志位發送給偽衛星定位解算模塊,偽衛星的定位解算模塊接收到初始值后,使用靜態初始化法進行整周模糊度的解算;在解算出整周模糊度后,偽衛星接收機便可開始運行,進行動態定位。
2.2? 數字濾波器
使用靜態初始化法進行整周模糊度的解算對初始值的精度要求較高。雖然GNSS的靜態定位精度可以達到厘米級,但是為了獲取更加準確的初始值,既需消除一些硬件噪聲和環境的電磁干擾對定位結果的影響,還需對GNSS的輸出數據進行數字濾波之后再作為偽衛星初始值。為了得到更為精確的初始值,提高整個系統的定位精度,下文將比較算術平均值濾波、中值濾波等常用一階數字濾波器的優缺點,并通過分析多組GNSS靜態定位的誤差,設計一種能達到偽衛星定位初始值精度要求的二階數字濾波器。
2.2.1算術平均值濾波
算術平均值濾波是最為常用的數字濾波器,算法原理是按照輸入的[N]個采樣數據[xi=i=1~N],尋找一個[y],使[y]與各個采樣值的偏差平方和最小,公式為:
通過式(6)求極值可以得出[y=i=1Nxi/N],與采樣值的算術平均值的算法公式相同,這個方法是將[N]次采樣值相加,取其算術平均值作為采樣值。
隨機干擾信號的特點是在某一數值附近范圍作上下波動,如果僅采用一次采樣的值作為最終的結果顯然是不準確的,工程上通常采用算術平均值濾除隨機干擾信號。但是算術平均濾波器輸出會引入脈沖帶來的誤差,無法有效濾除脈沖性干擾,因此,不適合脈沖干擾嚴重的場合。算術平均濾波器對信號的平滑程度取決于[N]。當[N]較大時,平滑度高,但靈敏度低,外界信號的變化對測量結果[Y]影響小;當[N]較小時,平滑度低,但靈敏度高。[4]對于偽衛星系統初始值來說,只需要輸出一組定位結果,對濾波算法的靈敏度沒有要求。所以,偽衛星初始值定位選用算術平均值濾波器,將[N]設為能采集到的有效數據的數量。
2.2.2中值濾波
中值濾波是對某一被測參數連續采樣[N]次([N]一般為奇數),然后將[N]次采樣的值按照大小進行排序,在重新排列的序列中取其中間值作為本次采樣值。設有采樣值序列[x1,x2,…xi],長度為[N],計算方法如下。
(1)首先利用排序算法將序列[xi]重新排列,生成新的序列為[y1,y2,…yi]。
(2)計算[N/2]的值。若能夠整除,說明[N]為偶數;若不能夠整除,則對[N/2]進行取商的運算,將[N/2]的值記為[k]。
(3)當[N]為偶數時,最終輸出值[z=yk+yk+1/2];當[N]為奇數時,最終輸出值[z=yk]。[5]
中值濾波對于去掉偶然因素引起的波動,或者采樣器硬件本身不穩定所造成的誤差而引起的脈沖干擾比較有效。對于偽衛星初始值定位的濾波而言,是一個具有可用性的數字濾波器。
2.2.3二階濾波
二階數字濾波器應用于GNSS輔助偽衛星系統初始定位中,也稱為偽衛星初值濾波器,其濾波流程如圖2所示。[6]GNSS將靜態定位結果輸入到算術平均值濾波器內,算術平均值濾波器的[N]設為10,在收集到10組定位結果后,將濾波值輸入到二階中值濾波器內,中值濾波器的[N]也設置為10。在中值濾波器也進行了濾波之后,將濾波值作為定位初始值輸入到偽衛星系統中。得到一個濾波后的定位初始值,需要100組GNSS靜態定位的值。GNSS設定為每5 s將一個定位值輸入到濾波器內。通過計算可知,得到初始值的時間為500 s,再加上GNSS捕獲跟蹤信號所需要的時間(一般不超過30 s),得到一個高精度的定位初始值的時間不會超過600 s。這個時間在高精度定位領域是可以接受的。
3? ? 試驗與分析
為了實測二階濾波器與常用一階濾波器的濾波效果,對二階濾波器(偽衛星初值濾波器)、算術平均值濾波器、中值濾波器的濾波效果在10個測試地點進行了測試。對濾波后的定位結果與真實坐標的差值做出了統計,圖3、圖4、圖5給出了3種數字濾波后定位結果的誤差。
從圖3、圖4、圖5可以看出: 二階濾波器濾波結果的誤差在大部分的測試點都表現比另外兩種一階數字濾波器的誤差更小,在個別測試點的誤差會比另外兩種一階濾波器稍大。總體上,二階濾波器的濾波效果達到了偽衛星初始值定位的精度要求,能夠在工程上解決偽衛星的初始值問題。
4? ?結語
為了解決地基偽衛星定位系統由于多徑效應引起的初始值定位困難問題,按照GNSS的整周模糊度解算原理并參考了GNSS與INS的組合定位方式,提出了GNSS輔助偽衛星初始值定位的方案。初始值的精度會影響偽衛星后續定位的精度,對GNSS定位結果進行二階濾波相較于常用的一階濾波可以提高初始值的精度,進而提高整個系統的定位精度。GNSS輔助偽衛星系統的組合不但在工程上解決了定位初始值問題,提高了偽衛星系統的實用性,也為后續兩個系統的組合定位奠定了基礎。
參考文獻:
[1] 陳展,王欣.慣性/星光組合導航系統在臨近空間高超聲速飛行器上的應用研究[J].飛航導彈,2020(4):90-95.
[2] 劉帥. GPS/INS組合導航算法研究與實現[D].鄭州:解放軍信息工程大學,2012.
[3] 匡宇龍,王玲,樂樂.地基偽衛星單歷元三頻組合逐級模糊度解算方法[J].全球定位系統,2020(2):44-48.
[4] 崔建偉.基于嵌入式系統的數字濾波器、傾角傳感器設計[D].北京:北京郵電大學,2008.
[5] 牛秀琴.幾種改進的中值濾波算法研究[D].成都:四川師范大學,2012.
[6] 高端陽,李安,傅軍.一種指數漸消記憶加權濾波的內交點定位算法[J].中國慣性技術學報,2018(3):299-304.
責任編輯? ? 張志釗
