基于STM8S105的智能車結構及控制系統的研究
2020-09-29 02:55:30曹鵬勇王建文
工程設計學報
2020年4期
曹鵬勇,王建文
(華東理工大學機械與動力工程學院,上海200237)
全國大學生工程訓練綜合能力競賽是由教育部高等教育司主辦的全國性大學生科技創新實踐競賽活動[1]。根據競賽要求,筆者設計了一種由重力驅動的自控避障智能車,它以質量為1 kg、高度為(400±2)mm的砝碼的重力勢能為整車的行進動能。在避開障礙物的前提下,智能車行進的距離越長,表明其性能越佳,因此應盡可能提高勢能向動能轉化的效率。
根據要求,所設計的三輪智能車行進所需的能量只能由砝碼提供,且能自動實現障礙物識別、軌跡優化、轉向和制動等功能[2]。如圖1所示,智能車由機械機構和自動控制電路組成,機械機構用于將砝碼下落產生的重力勢能轉化為智能車后輪的行進動能,單片機及其他電路模塊焊接在印刷電路板(printed circuit board,PCB)上,可以根據傳感器的信號驅動舵機以帶動智能車前輪轉向。
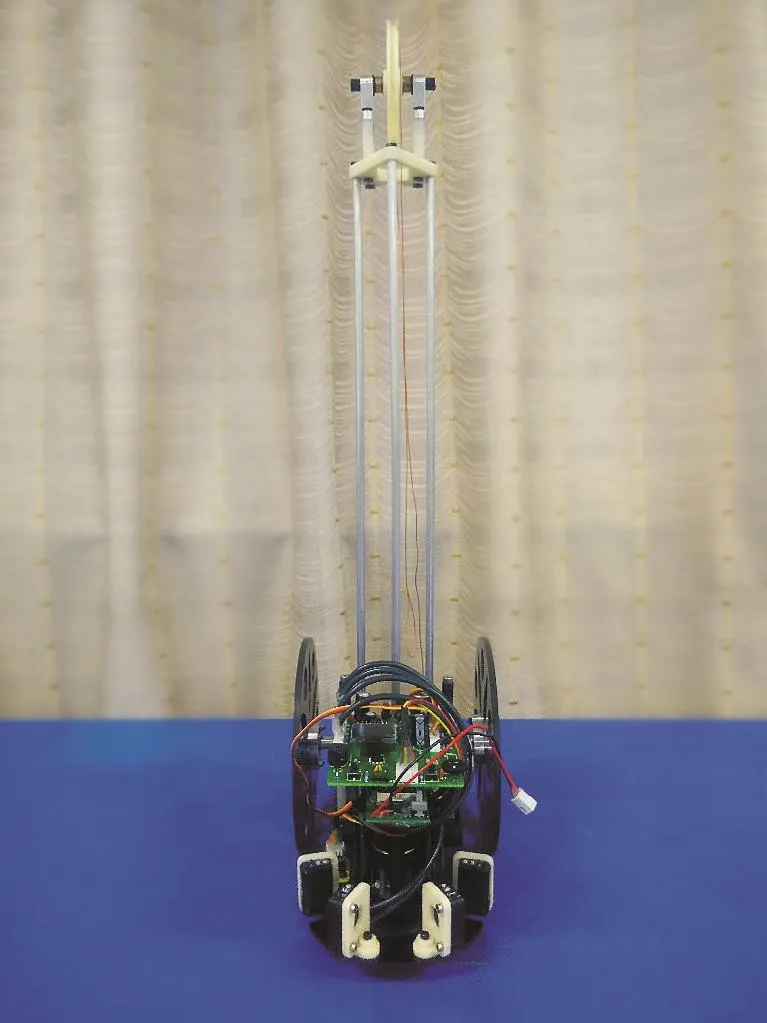
圖1 智能車實物圖Fig.1 Physical diagram of intelligent vehicle
1 智能車關鍵機構的設計與分析
1.1 階梯式繞線輪設計
目前控制智能車上坡的方法主要有以下2種:
1)智能車在平滑或避障路段時,采用如圖2所示的突變式繞線輪,砝碼和牽引線以“小-大-小”的繞線方式分別繞在其小軸和大軸上,以實現智能車的加速上坡功能。這種設計在結構和控制上較為簡便,但幾乎沒有考慮牽引線在大小軸間切換時形成的沖擊可能會造成智能車側翻、繩與砝碼連接處線斷裂等問題[3]。
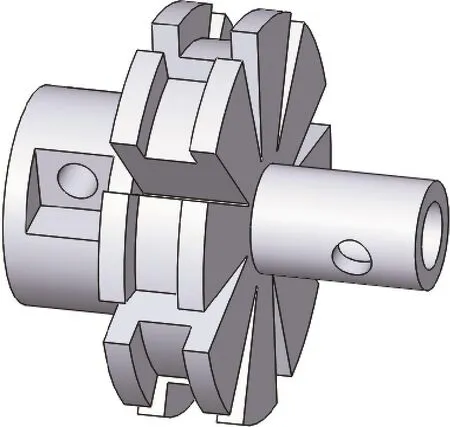
圖2 突變式繞線輪示意圖Fig.2 Schematic diagram of catastrophic winding wheel
2)采用如圖3所示的齒輪組傳動機構,通過檢測道路坡度變化,利用舵機控制離合器切換來實現智能車的加速上坡功能。……
登錄APP查看全文
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16