
工業機器人用諧波減速器機械結構設計
2020-10-09 10:01:11鄭紅
價值工程 2020年27期
關鍵詞:結構設計


摘要:諧波減速器具有高傳動比、扭矩高承載能力大、側隙小回轉精度高、機械效率高、運轉平穩安靜、體積小重量輕等特點,非常適用于工業機器人機械臂,本文對諧波減速器的機械結構設計與功用進行了分析研討。
Abstract: Harmonic reducer has the characteristics of high transmission ratio, high torque, large bearing capacity, small backlash, high rotation accuracy, high mechanical efficiency, stable and quiet operation, small size and light weight. It is very suitable for industrial robot manipulators. The mechanical structure design and function of harmonic reducer are analyzed and discussed in this paper.
關鍵詞:工業機器人機械臂;諧波減速器;結構設計
Key words: industrial robot manipulator;harmonic reducer;structure design
中圖分類號:TP242.2? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1006-4311(2020)27-0094-02
0? 引言
諧波減速器主要由諧波發生器、韌性材料制成的薄壁外齒輪(柔輪)、帶有螺紋過孔的剛性內齒輪(剛輪)三個基本構件組成,詳見圖1,諧波發生器的柔性軸承與柔輪裝配,使得韌性薄壁柔性外齒輪產生適度的彈性小變形,通過與剛性內齒輪的嚙合傳動來變速增矩,傳遞運動和動力。諧波發生器、柔輪、剛輪可任意固定其中1個部件,其余2個部件一個連接輸入(主動),一個連接輸出(從動),以實現減速或增速傳動。工業機器人用諧波減速器,往往采用剛輪固定、諧波發生器主動、柔輪從動輸出的形式,常用在工業機器人機械臂的R軸轉動(4軸)、B軸擺動(5軸)、T軸轉動(6軸)結構中。
1? 諧波減速器的類別及傳動比
諧波減速器一般用在工業機器人機械臂的R軸轉動、B軸擺動、T軸轉動結構中,可電機直驅,也可安裝齒輪或同步帶傳動,有部件型、單元型之分,部件型只提供剛輪、柔輪、諧波發生器三個基本部件,用戶可根據工作要求設計變速方式及安裝方式,裝配調試時需要進行諧波減速器與傳動零件的拆分及安裝,工作要求很高。單元型諧波減速器自身帶有外殼及CRB交叉滾子軸承,剛輪、柔輪、諧波發生器、殼體、CRB軸承被整體設計成一個單元部件,有輸入輸出連接法蘭或連接軸,輸出采用高剛性、精密CRB交叉滾子軸承支承,可直接驅動負載。單元型諧波減速器有標準型、中空軸、軸輸入三種基本結構形式,如圖2所示。標準單元型諧波減速器用于平鍵連接輸入軸(電機軸),適于電機直驅;中空軸單元型諧波減速器發生器凸輪開有大口徑中空孔,減速器內部設計有支撐軸,適于中心孔穿線場合。
軸輸入單元型諧波減速器發生器凸輪自帶輸入軸,減速器內部設計有支撐軸承,適用于需要在輸入端安裝齒輪或同步帶傳動場合。
諧波減速器在變速增矩傳動過程中,諧波發生器每回轉360°一圈,柔輪上任意點發生變形的重復次數稱為波數,用n表示,有n=2和n=3兩種,也就是雙波和三波,雙波傳動的柔輪應力小強度高。諧波減速器的柔輪、剛輪齒距p相同,滿足齒輪正確嚙合傳動條件,柔輪、剛輪的齒數不相同,剛輪齒數z2與柔輪齒數z1之差就等于波數n,即z2-z1=n,如果剛輪固定、諧波發生器主動、柔輪從動時,諧波減速器的傳動比為i=-z1/(z2-z1),雙波傳動z2-z1=2,因為柔輪齒數很大,諧波減速器可獲得很大的傳動比,傳動比為負,表示柔輪輸出的轉向與諧波發生器輸入的轉向相反,即逆時針輸入順時針輸出,或順時針輸入逆時針輸出。
2? 部件型諧波減速器機械結構
部件型諧波減速器外觀及組件見圖1,機械結構見圖3,諧波發生器由柔性軸承、橢圓凸輪、十字滑塊、軸套、彈性檔圈、銅片構成,采用帶軸心自動調整功能的歐式聯軸節型結構,十字滑塊凸榫一端連接橢圓凸輪,一端連接軸套,此種結構同軸度要求不是很高。凸輪外圓安裝有一個能彈性變形的薄壁柔性滾珠軸承,軸承內圈固定在凸輪上,軸承外圈與柔輪的內壁相互壓緊,柔輪是可以發生彈性變形的薄壁齒輪,柔輪與剛輪齒輪嚙合傳動,實現變速傳動功能。機械傳動時軸套可通過平鍵直接連接伺服電機輸入軸,電機直驅軸套回轉,軸套驅動十字滑塊回轉,十字滑塊驅動橢圓凸輪回轉,實現電機直驅諧波發生器旋轉。
諧波發生器的作用就是迫使柔輪發生適度的彈性小變形,諧波發生器、柔輪裝配完成后,迫使柔輪的橫斷面由原本的圓形變成橢圓形,橢圓長軸兩端附近的輪齒與剛輪輪齒完全嚙合,橢圓短軸兩端附近的輪齒與剛輪輪齒完全脫開,橢圓輪廓上其他部位的輪齒則處于嚙合與脫離分開的半嚙合過渡狀態。如果諧波發生器沿圖4方向連續順時針轉動,柔輪的變形就連續變化,柔輪與剛輪的嚙合狀態也連續變化,嚙入-嚙合-嚙出-脫開分離-再嚙入-嚙合-嚙出-脫開分離……,循環往復,驅動柔輪相對于諧波發生器回轉相反的方向緩慢轉動,實現減速增矩。諧波減速器工作時,剛輪固定,電機或同步帶傳動驅動諧波發生器輸入轉動,柔輪作為從動輪輸出轉動,并帶動負載工作運動。
3? 單元型諧波減速器機械結構
3.1 標準單元型諧波減速器
標準單元型諧波減速器外觀見圖2,具體機械結構見圖5,剛輪與柔輪齒輪嚙合傳動,實現減速增矩傳動,諧波發生器由柔性軸承、橢圓凸輪、十字滑塊、軸套、彈性檔圈、銅片組成,采用帶軸心自動調整功能的歐式聯軸節型結構,軸套可通過平鍵直接連接伺服電機輸入軸,電機直驅諧波發生器旋轉產生輸入轉動,且同軸度要求不高。剛輪、CRB交叉滾子軸承外圈、機架用螺紋連接固定,柔輪、法蘭、CRB交叉滾子軸承內圈、殼體法蘭用螺紋連接,通過殼體法蘭輸出運動及動力。
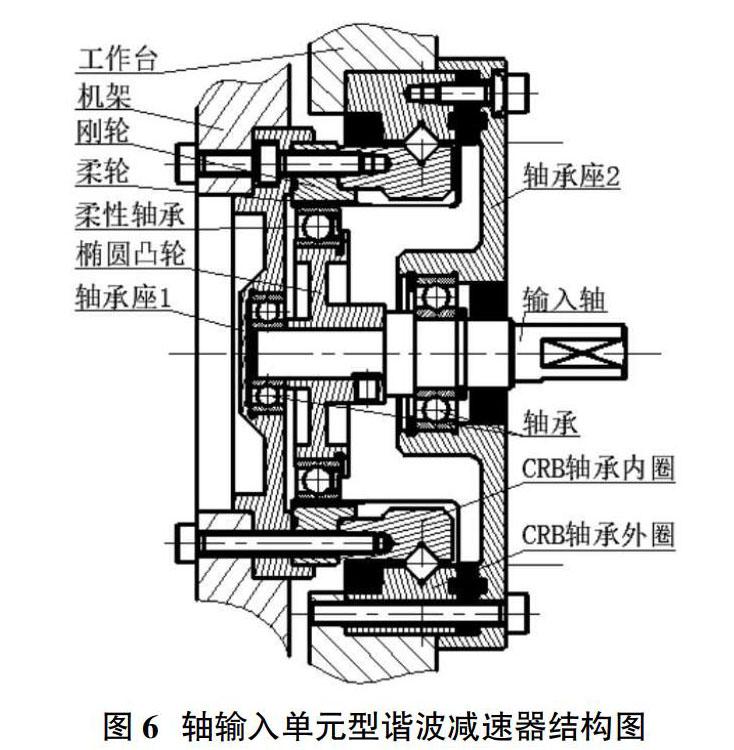
3.2 軸輸入單元型諧波減速器
軸輸入單元型諧波減速器外觀見圖2,具體機械結構見圖6,剛輪與柔輪齒輪嚙合傳動,實現減速增矩傳動,諧波發生器由柔性軸承、橢圓凸輪等組成,采用剛性連接結構,輸入軸直接與橢圓凸輪連接,輸入軸與橢圓凸輪裝配同軸度要求很高,輸入軸外伸端可安裝齒輪或同步帶傳動,輸入軸必須采用兩點支撐結構,兩端各單向固定。齒輪或同步帶傳動帶動輸入軸回轉,輸入軸驅動橢圓凸輪回轉,諧波發生器旋轉形成輸入轉動,剛輪、CRB交叉滾子軸承內圈、機架、軸承座1用螺紋連接固定,柔輪、CRB交叉滾子軸承外圈、工作臺、軸承座2用螺紋連接,通過工作臺輸出運動及動力。
綜上對諧波減速器機械結構設計分析,諧波減速器具有良好的機械工作性能,具有顯著的使用特點,傳動比大、扭矩高承載能力強、零側隙回轉精度高、機械效率高、結構簡單、體積小重量輕、運轉平穩安靜。但諧波發生器會產生軸向力,需要CRB交叉滾子軸承承受軸向力。
參考文獻:
[1]龔仲華,龔曉雯.單元結構的工業機器人手腕設計[J].機床與液壓,2017,11.
[2]龔仲華.工業機器人從入門到應用[M].北京:機械工業出版社,2016.
[3]葉暉.工業機器人實操與應用技巧[M].二版.北京:機械工業出版社,2017.
基金項目:本文系浙江省高等教育“十三五”第二批教學改革研究項目《新工科智能制造背景下高職本科專業建設與實踐——以機械工程專業為例》(jg20190736),課題建設階段性研究成果;本文系溫州職業技術學院教學建設與研究項目《新工科背景下高職本科機械工程專業人才培養體系構建與實踐——以溫州職業技術學院為例》(WZYzd201902)課題建設階段性研究成果。
作者簡介:鄭紅(1968-),女,江西南昌人,溫州職業技術學院機械系副教授,高級工程師,碩士,主要研究與教學方向為機械設計與數控工藝。
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
建材發展導向(2022年6期)2022-04-18 08:17:26
建材發展導向(2021年11期)2021-07-28 06:57:42
建材發展導向(2021年7期)2021-07-16 07:07:28
防爆電機(2020年4期)2020-12-14 03:11:14
中國核電(2017年1期)2017-05-17 06:10:04
電子制作(2016年1期)2016-11-07 08:43:05
專用汽車(2016年5期)2016-03-01 04:14:49
專用汽車(2016年5期)2016-03-01 04:14:48
中國房地產業(2016年2期)2016-03-01 01:25:23
