地面激光掃描技術在城市軌道交通構筑物結構斷面檢測中的應用
2020-10-12 04:36:38劉弟林
鐵道勘察 2020年5期
劉弟林
(中國鐵路設計集團有限公司,天津 300251)
近年來,隨著越來越多的城市軌道交通線路建成并投入使用,其結構安全檢測工作變得愈發重要[1]。傳統檢測手段多為人工方式按照一定間隔密度采集信息,存在作業效率低,安全風險高,采集的數據只能反映局部特征等不足情況。而三維激光掃描技術可在短時間內獲取目標豐富的紋理和結構信息,其構建的二維影像與三維模型能直觀地反映城市軌道交通線路相關結構變形情況。目前,脈沖式地面激光掃描儀測距精度可達1 mm,測角精度可達0.004°,測距長度可達6 000 m、激光發射頻率可達300 kHz。
已有許多學者進行了相關研究:何桂珍等將三維激光掃描技術應用于隧道收斂檢測[2];張立等研究了基于三維激光掃描技術的隧道相對變形測量方法,并將檢測結果與傳統檢測手段進行比較分析[3-4]。但以往研究多基于同一環內隧道管片進行變形分析,以下將工程絕對坐標系統引入分站式激光掃描中,以獲得整條隧道在施工坐標系統下的激光點云數據,使其滿足與隧道設計結構斷面對比分析的需求[5-6]。
1 激光掃描技術
激光掃描技術的基本原理:掃描儀內部發射激光束,經旋轉棱鏡反射后射向目標物,遇到目標表面再次反射后被光電探測器接收并生成點云數據(如圖1所示)[7-8]。通過伺服器測量目標物與掃描儀間的水平角和垂直角,即可解算出目標物在掃描儀坐標系下的空間位置信息(如圖2所示)[9]。

圖1 三維激光掃描儀工作原理

圖2 掃描系統坐標計算示意
由圖2可得到如下關系式
(1)
式中,D為兩點間距離值;θ為兩點間垂直角;φ為兩點間水平角。
依據其測距原理的不同,三維激光掃描技術主要分為脈沖式和相位式2類[10]。
脈沖式測距是根據脈沖激光發射與接收時的往返時間差來計算被測目標的距離。優點:瞬時功率極高,激光能量集中,具有良好的方向性與抗干擾能力,測距范圍可達上千米。缺點:掃描速度較慢,測距精度相對較低[11-12]。計算公式為
(2)
式中,D為掃描儀到目標點的距離;c為光速;t為脈沖激光信號往返時間差。
相位式測距依據無線電波段的頻率來調制激光束,同時量測出調制光往返過程中的相位延遲,再利用調制光的頻率計算該相位延遲所代表的距離。優點:掃描速度快,測量精度高,可到毫米級,適用于近距離掃描或微領域。缺點:測距較短[13-14]。計算公式為

(3)
式中,D為掃描儀到目標點的距離;c為光速;φ為測定的相位差;f為調制光的頻率。
目前,隨著電子信息技術的不斷進步,部分激光掃描設備可以在掃描的同時,采用視覺追蹤技術,自動完成點云拼接。通過融合慣導、即時定位與地圖構建技術,得到較高精度的位置數據,其軌跡重建準確度較好。
激光掃描技術工程領域方面的主要應用有:地形測量、高鐵構筑物測量、鐵路限界測量、三維建模、變形監測等[15]。
2 工作流程和數據處理
地面激光掃描包含數據采集、數據匹配、點云數據處理、成果數據輸出等流程。
(1)準備工作主要包含2部分:控制點布設和掃描站布設。
(2)采集的原始數據包含多個視點的數據,這些數據需轉換到統一的坐標系中,利用控制點及公共部分數據的約束關系,對點云數據進行坐標轉換。
(3)數據預處理目標是將掃描過程中的外界條件產生的誤差盡可能降到最小。受現場條件限制,有水汽、粉塵等遮擋時,會使掃描數據產生噪聲等隨機誤差,另外,重疊區域觀測數據匹配時容易出現誤差。因此,在利用數據之前,需要對這些誤差進行預處理,可采用手工刪除、重疊區域重采樣等方法。
(4)激光掃描獲取的三維坐標點云數據可制作成果包含構筑物的各種斷面、三維模型、特征點要素、大比例地形圖等。
3 隧道洞內掃描測量
3.1 洞內精密控制點布設
隧道內控制點為掃描儀測量提供基準,其精度直接決定掃描的精度。掃描過程中,需建立高程和平面控制網, 高程控制點可在車站底板上布設,平面控制點一般采用強制歸心標。站內的控制點應至少布設3個,以保證控制點位的可靠性。
(1)平面控制網布設
隧道區間的精密導線網應布設為附合導線(網),在保證相鄰點之間通視的條件下,區間內的導線平均邊長不大于150 m,曲線段點間距不小于60 m。
(2)高程控制網布設
隧道區間的高程控制點與導線點共用,采用不低于二等水準的測量方法,與車站底板的水準點聯測后,進行嚴密平差計算獲得高程成果。
3.2 洞內多站式數據獲取
(1)激光掃描
隧道區間內掃描儀的激光入射角比較大,反射光強度相對較低,對于相位式掃描儀,單側反射率在20 m內可滿足測量需求。結合導線設置的情況,一般掃描儀站間距宜控制在36 m內(這樣可確保掃描儀單側掃描距離控制在20 m內)。掃描儀架設完成后,將標靶架設在距掃描儀3 m范圍內(這樣既能滿足標靶拼接的要求,也能在三維激光點云上觀察與選擇標靶的中心點)。利用全站儀測量本站至少4個標靶中心點坐標后,采用中密度模式進行掃描,結束后,將掃描儀及標靶移至下一站(如圖3所示)。

圖3 自由設站三維激光掃描
(2)獲取標靶坐標
在導線點上設站,采用全站儀測量標靶中心點坐標。測量時,使用全站儀目鏡中的十字絲瞄準標靶的幾何中心,按照設定的順序進行測量(順時針或者逆時針)。
3.3 掃描儀設站方式
地面激光掃描的默認坐標系是以掃描儀幾何中心為坐標原點。目前,先進的掃描儀系統自帶傾斜感應器,可以在已知坐標系和掃描儀自身坐標系之間建立一套坐標轉化關系,有以下幾種設站方式。
(1)掃描儀任意設站
全站儀架設在洞內控制點上,標靶布設在掃描儀附近,用全站儀測量標靶中心點三維坐標。通過嚴密“七參數轉化”,把以掃描儀中心為坐標原點的坐標系轉換為已知的坐標系。
(2)全站儀模式
標靶架設在已知點上,掃描儀設于另一個控制點上或者已知方向上,類似全站儀已知后視點的測量方式。該測量方式需要控制點數量少,利用了掃描儀傾斜改正模式,掃描儀獲取的激光點就是建立在已知坐標系上的坐標點數據。因此,該類測量方式靈活,適合于不需要拼接的一站式掃描。
(3)導線測量模式
利用掃描儀的傾斜感應器可實現傳統導線測量模式,即建立掃描儀和已知坐標系之間的關系。傾斜傳感器能夠探測掃描儀是否水平,無需拼接大量的標靶。掃描儀一般支持閉合導線和支導線2種模式。
3.4 坐標轉換
將地面激光掃描的默認坐標系轉換到工程施工坐標系可采用七參數法,該方法考慮了坐標平移(X0,Y0,Z0)、坐標軸旋轉(εX,εY,εZ)以及尺度變化,共計7個參數,其在2個不同空間直角坐標系的轉換公式為

(4)
進一步可簡化為
X″=K×R×X′+X0
(5)

(6)
簡化為

(7)
根據式(5),將n個公共點分別減去式(7),消去平移參數,則有

(8)
式(8)即為中心化后向量形式的布爾莎七參數嚴密解算模型。根據式(8),至少需要3個控制點,實際作業一般選擇3個以上控制點。
在隧道掃描過程中,利用設在隧道內控制點上的全站儀測量標靶施工坐標,掃描儀獲取標靶的掃描坐標,采用最小二乘法得到7個轉換參數的最或然值。一般每站設置4個標靶,在計算過程中剔除殘差最大的標靶。
通過七參數法,將掃描的每一站數據轉換為統一坐標系內的施工坐標,再把所有站數據拼接在一起,就構成了一條完整隧道點云模型(如圖4、圖5所示)。
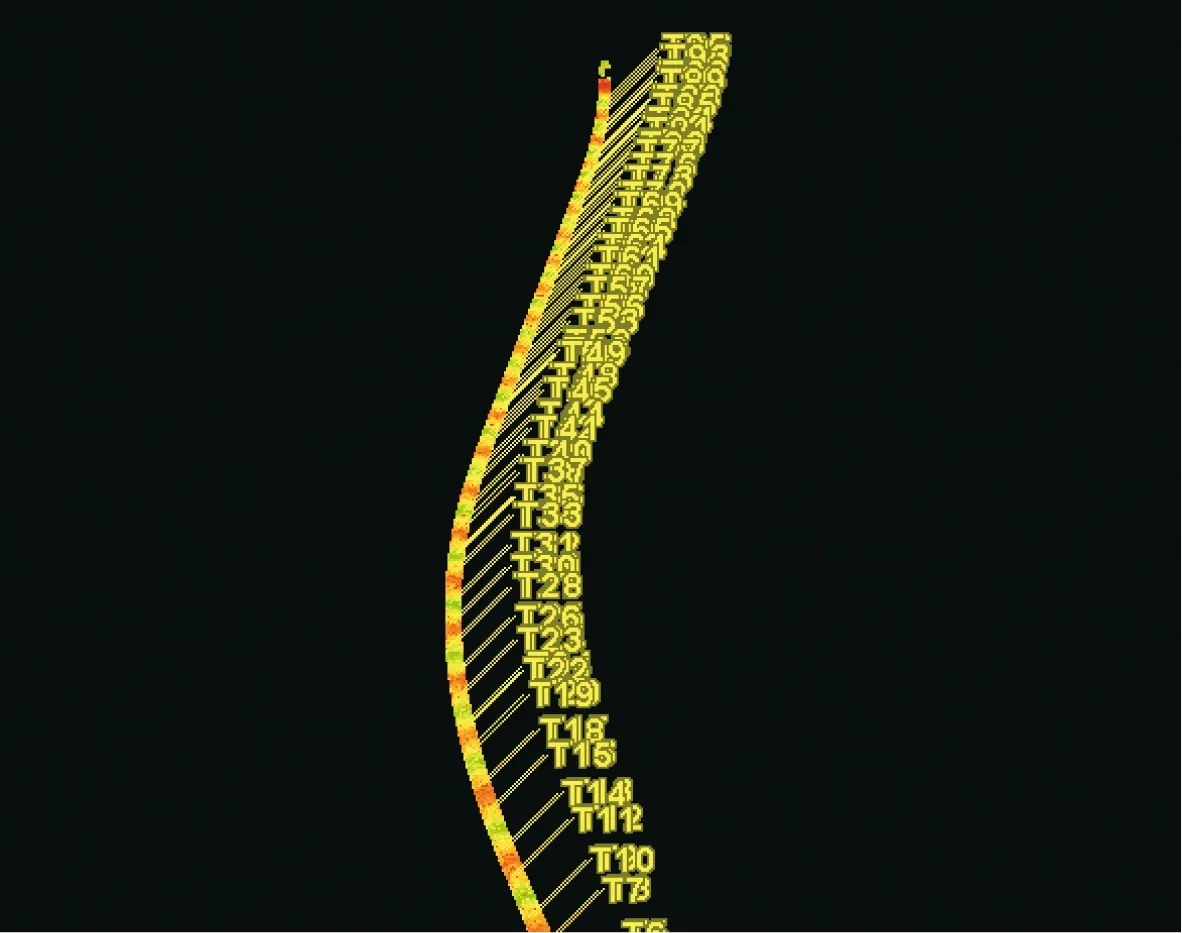
圖4 隧道拼接點云模型

圖5 隧道拼接點云模型
3.5 精度分析
(1) 標靶掃描精度分析
標靶掃描精度分析是指掃描儀自身獲取標靶中心定位精度。在掃描時,掃描儀因測量角度和距離誤差,將最終引起標靶掃描定位的誤差。地面激光掃描儀標靶掃描定位精度與掃描距離以及反射介質有直接的關系。
選擇一塊距離監測標識小于20 m的穩定區域,在此區域內設置4個反射標靶,使用HDS6100型掃描儀進行高密度掃描,共計掃描10次,任意選取其中3次掃描數據進行處理,獲取監測點中心坐標的差值,如圖6所示。

圖6 掃描監測點之間的差值統計
在掃描儀距離監測點20 m以內時,標靶掃描的單點精度為3 mm,將測量距離擴大到50 m時,得到標靶掃描的單點精度為5 mm。
掃描儀距離監測點20 m范圍內,選取任意5次掃描中的8個監測點坐標進行比較,比較互差得出監測標識的單點與全站儀比較差值為6 mm。將掃描儀距離監測點擴大到50 m,得出監測標識的單點與全站儀比較差值為8 mm。
(2)監測點布置
將全站儀實測隧道特征監測位置與成果模型的測量值進行比較,具體為:對應里程上L1、L2、L3、L4、L5、L6處的距離,以及設計線位的板底(H底)與板頂(H頂)的高度(如圖7所示)。

圖7 盾構區間模型監測點位示意
通過與設計值比較,可以得到沉降及平面位移量;通過與全站儀實測數值比較,可以計算監測點的變化量精度信息,如圖8所示。

圖8 監測點精度檢核
通過監測點與全站儀實際測量值對比分析可知,高程差值及垂直線位方向上的誤差滿足《城市軌道交通工程測量規范》相應的要求。
4 結論
在城市軌道交通構筑物結構斷面檢測中,地面激光掃描技術已達到了全站儀等常規測量儀器的測量精度,其內、外符合精度均滿足《城市軌道交通工程測量規范》相關要求,且作業效率遠高于常規測量手段,獲取的激光點云還可用于限界檢測、隧道收斂、錯臺檢測等工作,具有較高的可行性和推廣應用價值。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08