高頻信號注入法的無傳感器運行比較研究
2020-10-12 00:26:40李藝仁簡煒彭國生張金亮陳宇峰黃新成
湖北汽車工業學院學報 2020年3期
關鍵詞:信號
李藝仁,簡煒,彭國生,張金亮,陳宇峰,黃新成
(湖北汽車工業學院 電氣與信息工程學院,湖北 十堰442002)
在交流傳動系統中,為了實現高精度、高動態性能的速度和位置控制,采用磁場定向矢量控制或直接轉矩控制[1-2],一般通過光電編碼器、旋轉變壓器及霍爾傳感器等機械傳感器來實現轉子位置和速度的測量。機械傳感器的安裝、電纜連接、故障等問題會降低系統的可靠性和穩定性,在電機轉速較高的場所中會額外增加電機控制系統的整體尺寸及制作成本,這些因素限制了機械傳感器的應用范圍。因此學者們逐漸提出無傳感器控制技術方案,其主要思想是將電機繞組中有關的電信號提取出來,然后對電信號進行處理,提取出轉子位置及速度的相關信息。在這些獲取轉子位置及速度信息的方法中,多數以檢測基波反電動勢的方法來實現,但當電機處于低速甚至零速的工況下,基波反電動勢很小而難以檢測,具有一定的局限性。另外,由于反電動勢法主要依賴于基波電壓和電流信號來獲取轉子的位置及速度信息,所以對電機參數非常敏感,魯棒性較差。為了在永磁同步電機低速及零速的工況下也能準確捕捉到轉子的位置和速度信息,一些學者提出了轉子凸極追蹤法[3-4]。該方法需要持續注入高頻激勵信號,主要依賴于轉子的凸極效應,故對電機參數不敏感,魯棒性好。
高頻信號注入法的主要思想是在電機中注入幅值和頻率固定的高頻信號,這些信號既可以是電流信號,也可以是電壓信號;當這些信號經過電機三相繞組后,會產生對應的高頻信號,而這些高頻信號中攜帶與轉子位置和速度相關的信息,可用特定的方式將其抽取出來。從注入高頻電信號的種類進行劃分,大體上可分為旋轉高頻電壓注入法和脈振高頻電壓注入法,前者要求永磁同步電機交、直軸電感差值較大,即電機具有較大的凸極率;而后者由于高頻電壓的注入方式不同,會產生“飽和凸級效應”現象[4],因此可應用于插入式、內置式甚至是隱極的表貼式永磁同步電機中,對永磁同步電機的類型無限制要求。很多專家學者都對2 種高頻信號注入法進行了深入的理論研究,卻很少直接將它們聯系起來進行技術對比,分析其優缺點及各自適用的領域和場合。文中對旋轉高頻電壓信號注入法以及脈振高頻電壓注入法的工作原理進行詳細介紹,通過搭建仿真模型來對比分析2種高頻信號注入法的運行情況,并客觀評價其優劣。
1 旋轉高頻電壓信號注入法
1.1 工作原理

一般電機的基波頻率選擇范圍為50~60 Hz,而注入的高頻信號頻率選擇范圍為0.5~2 kHz,超過電機基波頻率的10 倍,因此可將傳統的永磁同步電機模型簡化為簡易RL模型來進行分析。高頻時電阻相對于電抗來說小很多,所以忽略不計;此時高頻激勵下三相永磁同步電機的電壓方程為

式中:udin、uqin和idin、iqin分別為旋轉坐標系d-q 軸的高頻電壓和高頻電流分量;Ld和Lq為定子d 軸和q軸電感。假定注入高頻電壓信號的頻率為ωin,幅值為Vin,則高頻電壓信號的表達式為

式中:uαin、uβin為靜止坐標系α - β 下的高頻電壓分量。將式(1)變換到同步旋轉坐標系下,即
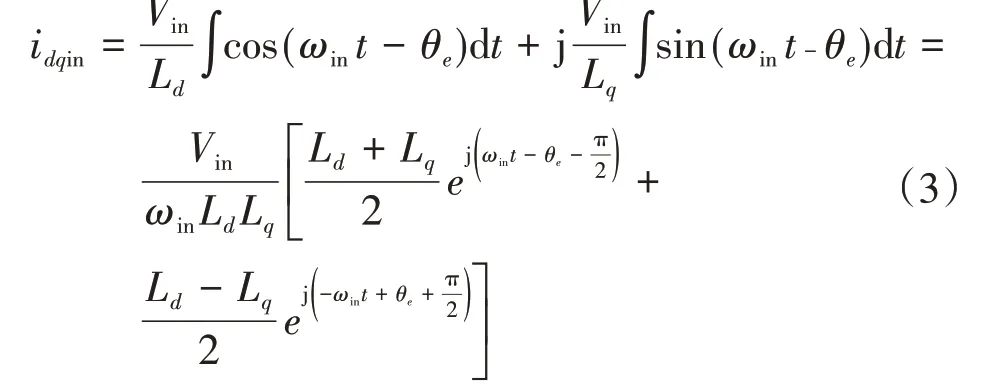
將(3)式變換到靜止坐標系中的表達式為
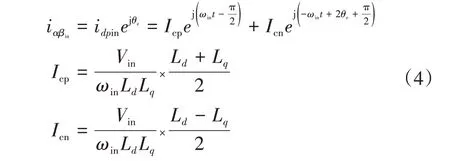
式中:θe為轉子實際位置;Icp為正相序高頻電流的最大值,而Icn為負相序高頻電流分量的最大值。
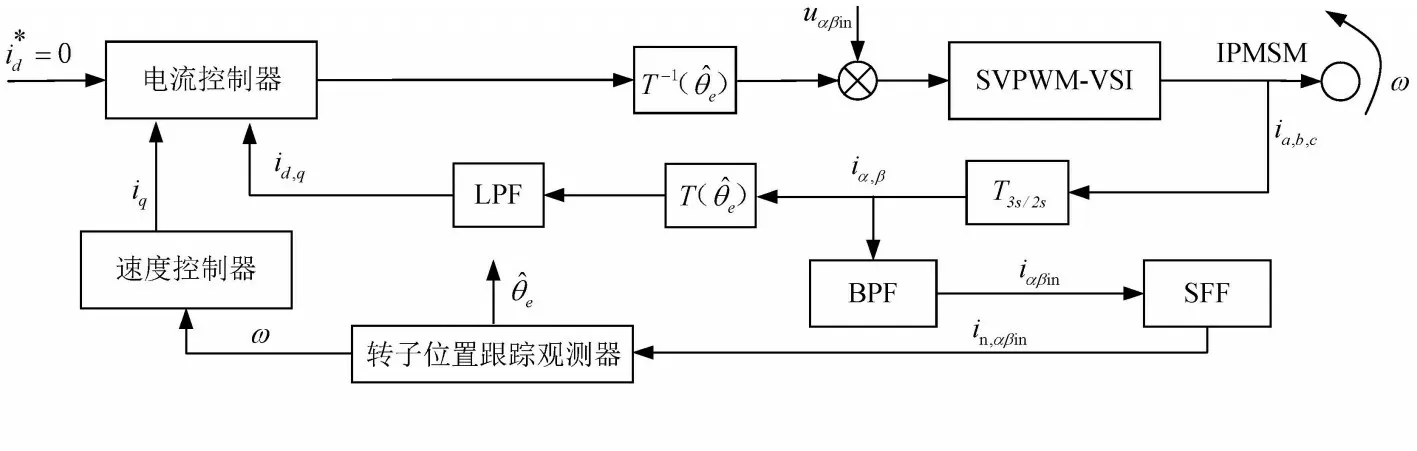
圖1 旋轉高頻電壓信號注入法系統原理圖
為了準確獲取負相序高頻電流信號中包含的轉子位置、速度信息,必須盡可能地將基波電流、SVPWM 載波頻率電流以及正相序高頻電流分量濾除,以免對負相序高頻信號的檢測與提取過程造成較大干擾。由于注入高頻電流信號頻率約為基波電流信號頻率的10倍,而SVPWM載波頻率又遠高于高頻電流信號的頻率,因此可通過BPF設置合適的高低通帶邊緣頻率來濾除基波電流和SVP?WM 載波頻率電流。高頻電流信號中的正負相序分量旋轉方向相反,考慮用同步軸系高通濾波器將正相序高頻電流分量濾除。其思想是通過坐標變換把高頻電流矢量變換到與注入高頻電壓矢量同步旋轉的參考坐標系中[5],將正相序高頻電流矢量變為直流,然后通過一般的高通濾波器將其濾除。LPF 的作用是在閉環控制中將混雜在基波電流中的高頻電流信號濾除,保證電流閉環不受影響。由于系統中使用了較多數量的濾波器,使得在濾波前后負相序電流分量產生一定的相位滯后,導致轉子位置估計值最終滯后于實際轉子位置一定的角度,故在系統實現方面需加入對應的角度補償,其值視電機實際轉速的大小而定。
1.2 位置跟蹤觀測器的設計
對式(4)進行分析可看出:高頻電流信號包含正負序2種分量,負相序電流分量包含轉子位置信息,且正負相序電流分量旋轉方向相反;所以需要設計轉子位置追蹤觀測器來提取轉子位置信息并對其進行檢測。濾除基波電流和SVPWM 載波頻率電流后,式(4)中只剩下提取出來的負相序高頻電流信號,該信號中包含了轉子的位置和速度信息,用來進行凸極追蹤;其矢量信號表達式為

為了得到位置跟蹤器所需的位置信息,采用外差法解調空間凸極調制的負相序分量,通過歐拉公式將式(5)寫成復數形式,則有

采用外差法的方式是將式(6)中的前后兩項分別乘以sin(2- ωint)和jcos(2- ωint),從而得到轉子凸極跟蹤表達式為

根據極限思想,當轉子位置誤差接近0 時式(7)可近似線性化;調節誤差信號使之趨近于0,則估計轉子位置和實際轉子位置θe的差值也趨近于0,此時估計轉子位置無限接近于實際轉子位置θe的值,再對進行微分,得到估計轉子角速度。文中位置跟蹤觀測器由外差法、PID 調節器、電機機械系統數學模型組成,結構框圖見圖2。
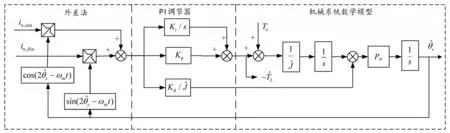
圖2 旋轉高頻電壓信號注入法位置觀測器
2 脈振高頻電壓信號注入法
2.1 工作原理
從注入高頻信號的方式和位置來看,脈振高頻電壓信號注入法不需要在坐標系中注入2 個高頻信號,而是在估計同步旋轉坐標系d-q 中的d 軸上注入1 個幅值和頻率固定的高頻正弦電壓信號。在靜止坐標系中,這個信號是脈振的電壓信號[6]。
在估計同步旋轉坐標系d-q中,系統注入高頻電壓信號的方程為

在坐標系d-q中電機交直軸的定子電感為

在兩相靜止坐標系α - β 中,式(9)中的定子電感表達式可寫為

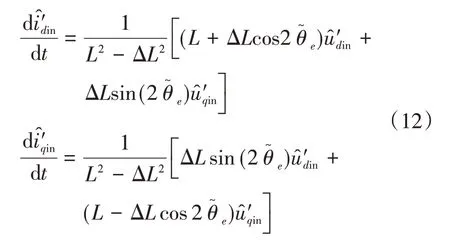
注入脈振高頻電壓信號的表達式為

式中:uin和ωin分別為高頻電壓信號的幅值和頻率,將式(13)代入式(12)進行化簡可得:
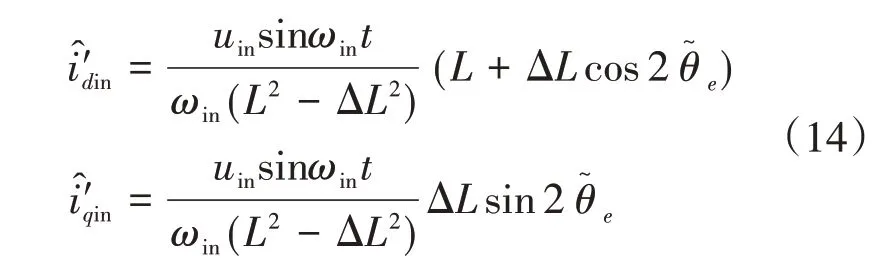
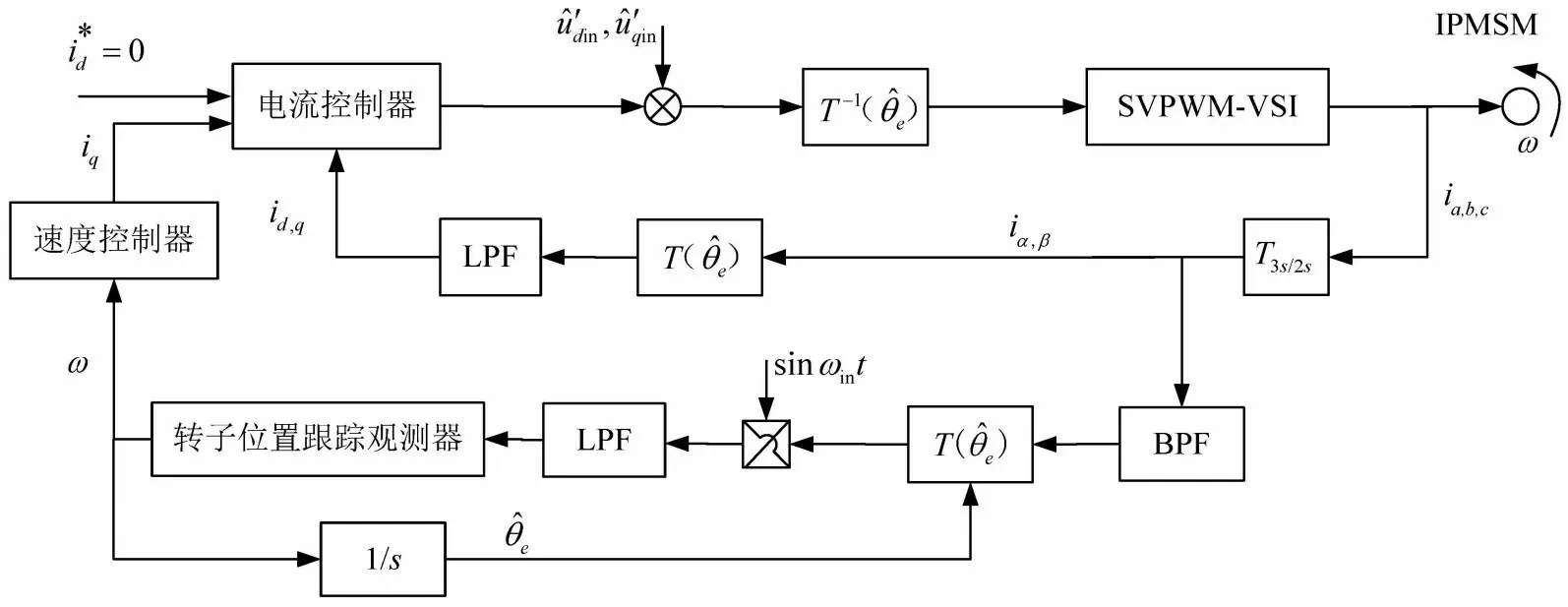
圖3 脈振高頻電壓信號注入法原理圖
統結構更加簡單,采用的濾波器個數更少[7],且由于整個矢量控制系統構成了轉子位置角的閉環控制,因此轉子位置的估算值與實際值得差異很小,不需要進行額外的轉子位置角度補償。
2.2 位置跟蹤觀測器的設計
由于正弦函數在1個周期內滿足條件:
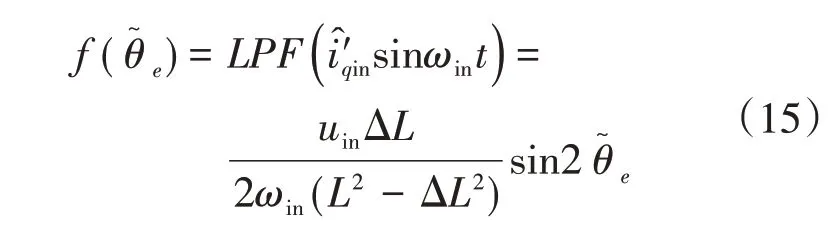
當轉子位置估算誤差足夠小趨近為0時,誤差信號的表達式可簡化為
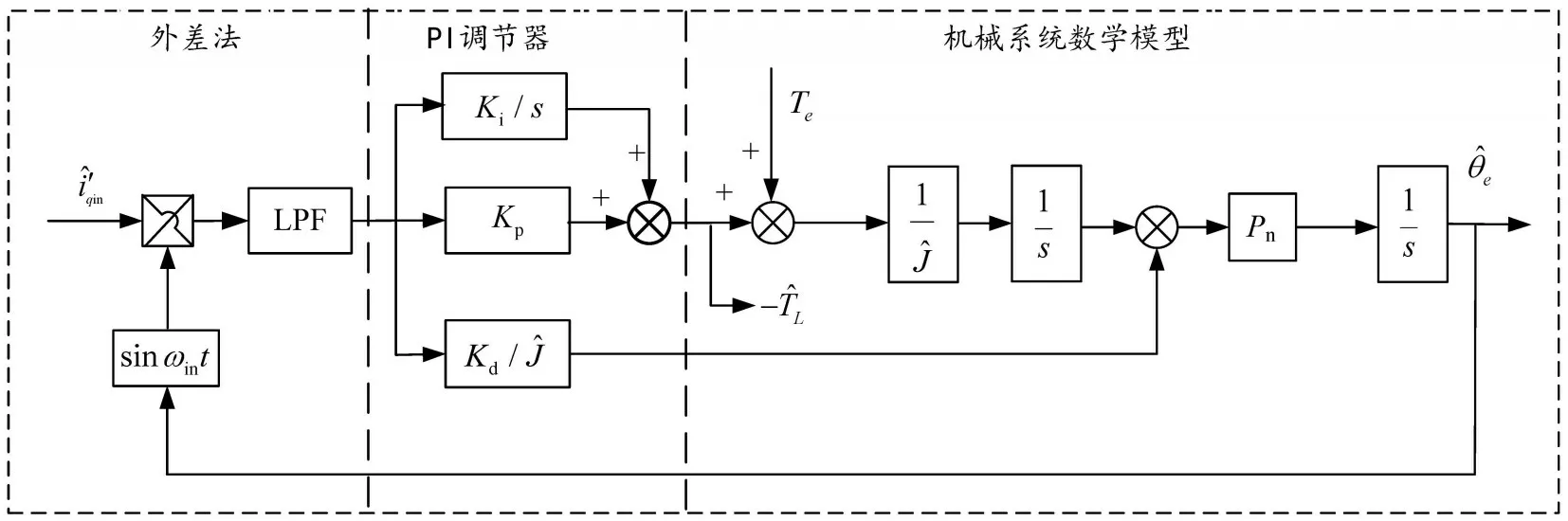
圖4 脈振高頻電壓信號注入法位置觀測器
為了更好地與旋轉高頻電壓信號注入法進行比較,利用脈振高頻電壓信號注入法搭建了轉子位置跟蹤觀測器,實現框圖如圖4 所示,轉子位置誤差信號經過轉子位置跟蹤觀測器后就可以得到轉子的位置信號。
3 仿真驗證對比及分析
在Matlab 2019a 中分別用旋轉高頻電壓信號注入法和脈振高頻電壓信號注入法搭建仿真模型,在轉速估計、轉子位置估計等方面對2種仿真模型的結果進行對比和驗證,仿真系統基于傳統id= 0的控制方式,電機極對數為2;定子電感Ld為5.2 mH,Lq為17.4mH;定子電阻為0.33Ω;磁鏈為0.646 Wb;轉子轉動慣量為0.008 kg·m2;阻尼系數為0.008 N·m·s,母線電壓設定為311V;載波頻率為5 kHz。對于高頻載波信號的選擇,如果高頻信號頻率太高,則會使系統產生混雜信號,故一般為0.5~2 kHz;另外高頻載波信號的幅值上限由其需要的電能和產生的噪聲等因素決定,故一般設定為額定電壓的0.05~0.1 倍。最終確定2 種仿真模型中Vin為20 V,高頻電壓信號頻率為1000 Hz,LPF通帶邊緣頻率設置為987 Hz,BPF 低、高通帶邊緣頻率分別設置為987 Hz和1018 Hz。

圖5 旋轉高頻電壓信號注入法仿真結果
為比較2 種高頻信號注入法在低速下的作用效果,設定電機初始轉速為100 r·min-1,在0.3 s 時刻升至500 r·min-1,仿真結果如圖5~6 所示:當轉速為100 r·min-1時,2 種高頻信號注入法都有不錯的效果,轉速誤差與位置誤差十分小,可以忽略不計;設定轉速升至500 r·min-1時,在0.7 s 時2 種方法的轉速波形都趨近于穩定,轉速誤差雖略有增加,但依然控制在±0.05 r·min-1。采用脈振高頻電壓信號注入法的電機矢量控制系統中,由于整個矢量控制系統構成了轉子位置角的閉環控制,系統比較依賴于PID調節器中的參數,但系統調速過程中PID調節器的參數難以及時調整,因此仿真結果中脈振高頻電壓信號注入法對轉速突變時的轉子位置誤差更大一些;而在調試過程中也發現:由于高頻電壓信號注入法采用了更多種類和數量的濾波器,造成了估計轉子位置角的滯后現象,需要經過精準計算后根據不同轉速給估計轉子位置角添加對應的角度,這也使系統在結構上變得更加復雜。將2 種方法的最大轉子位置誤差由弧度單位轉化為角度單位后,最大轉子位置誤差均在0.1°以內,表明2 種方法均能在電機調速系統中精準地測出轉子位置及轉速,且系統的動靜態性能良好。
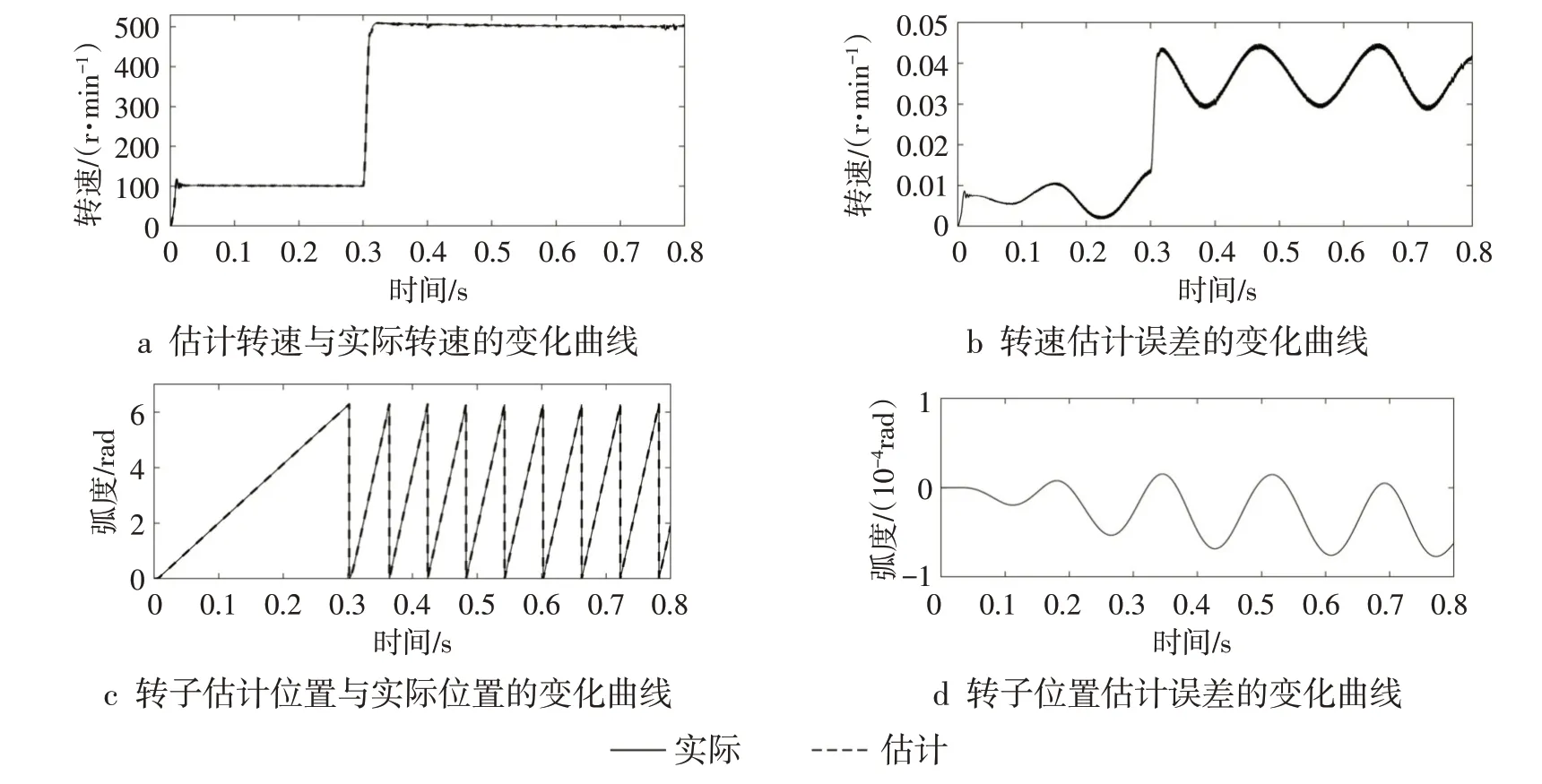
圖6 脈振高頻電壓信號注入法仿真結果
4 結論
通過搭建仿真模型對采用旋轉、脈振高頻電壓信號注入法的無傳感電機矢量控制系統進行比較。對仿真結果進行分析可得:2種方法均能在低速下精準地估算出轉子速度及位置,具有較強的魯棒性。旋轉高頻電壓信號注入法構成的系統結構相對復雜,使用了較多種類和數量的濾波器,從而使得轉子位置估計角度存在一定的滯后,需要在不同轉速情況下補償相應的轉子位置估計角度;其注入方式是在靜止坐標系中注入高頻正弦電壓信號,不受控制策略的影響,在實際系統中更加容易調試和實現。脈振高頻電壓信號注入法的系統結構相對簡單,不用對轉子位置估算角進行額外補償,但對PID調節器的參數較為敏感,且需要在注入高頻電壓信號時準確確定估計轉子同步軸旋轉坐標系的位置,故在實現方面相對困難一些。總體來說,2種高頻信號注入法都能在中低速條件下有效檢測出轉子的位置及轉速,且都不依賴于電機自身的參數,靜動態調速性能較好。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06