家庭助老服務機器人的設計與分析
2020-10-12 14:05:21張嶧左巍李衛國
現代商貿工業 2020年31期
張嶧 左巍 李衛國
摘?要:傳統助老機器人抓取物品時穩定性差、運動軌跡不精確、機器人整體變形量較大。針對上述問題,設計了一款能夠輔助老年人的智能抓取物品的家庭式助老機器人。提出了應用Matlab軟件對助老服務機器人懸臂結構進行逆運動學仿真分析的方法。構建了其底盤部分、懸臂機構、抓取機構的三維模型。計算求得底盤部分各全向輪的速度表達式和機器人懸臂的D-H位姿運動方程組,仿真獲得了實體機器人難以得到的變形數據。通過實驗證明,機器人可以實現精確運動與機器人布局的合理與穩定性。
關鍵詞:助老機器人;結構設計;有限元法;運動學
中圖分類號:TB?文獻標識碼:A?doi:10.19311/j.cnki.1672-3198.2020.31.073
0?引言
隨著自動化、智能化技術的不斷進步,使得機器人在國內外研究領域的得到普遍重視,也得以進一步的推廣和發展。同時,由于世界人口老齡化程度的進一步加深,作為機器人其中之一的家庭式助老機器人的剛性需求越來越明顯。
據統計,我國60歲以上老人已達2.41億人,這表明我國已經步入老齡化社會。養老問題已成為當前社會的一大壓力。且鑒于我國基本國情,由于計劃生育政策的實施使得當前老人多數只有一個子女。子女不能經常陪在老人身邊,使得多數老人在日常生活行動上只能靠自己。然而,由于年齡大老年人腿腳不便,有的甚至臥病在床而不能移動。故而,非常有必要設計一種家庭式助老機器人,以代替老年人行走,幫助其從事日常抓取、搬運等作業。這樣可大幅度地避免了老年人在日常生活中由于移動需求而摔倒現象的發生。所以,為了關愛老年人和殘障人士,提高他們的生活質量,研發一種高效、可靠的家庭式助老機器人,服務老年人和下肢殘障人士的日常行動,具有十分重要的意義。
1?家庭助老機器人的結構組成及原理
助老服務機器人作為老人生活的重要輔助工具,主要是通過為一些行動不便或者獨居的老年提供簡單且必要的生活服務。故而,在功能方面要求其提供必要簡單的生活服務。助老機器人須具備自主定位、家庭環境構建地圖、自主避障、路徑規劃等基本功能。本文所設計的助老機器人,正是一種應用于對老人實行實時幫助,在工程人員所設定的預定指令下,為老人提供滿足其生活需求的服務型機器人。
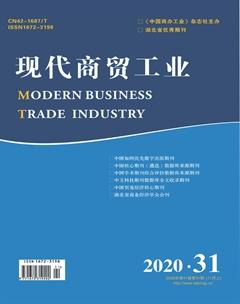
本文主要研究家庭助老機器人的機構部分,包括助老機器人的底盤部分、懸臂機構、抓取機構。如圖1所示,為所設計的家庭助老機器人整機結構圖。
家庭助老式機器人結構設計合理,三角底盤的主骨架采用鋁合金角鋼焊接而成,既不影響機架強度,又減輕了其重量,降低了能耗。在助老機器人底盤上將三個全向輪進行合理均勻布局,確保整個機器人在執行多種運動方式時的平穩性和可靠性。每個萬向輪都由獨自的步進電機驅動,因此,可通過對每個萬向輪上的驅動電機做運動控制,各電機的聯動可實現整個助老機器人在不改變運動姿勢的前提下實現多種運動形式,這樣就實現了所要求的全向移動。
1.1?助老機器底盤設計
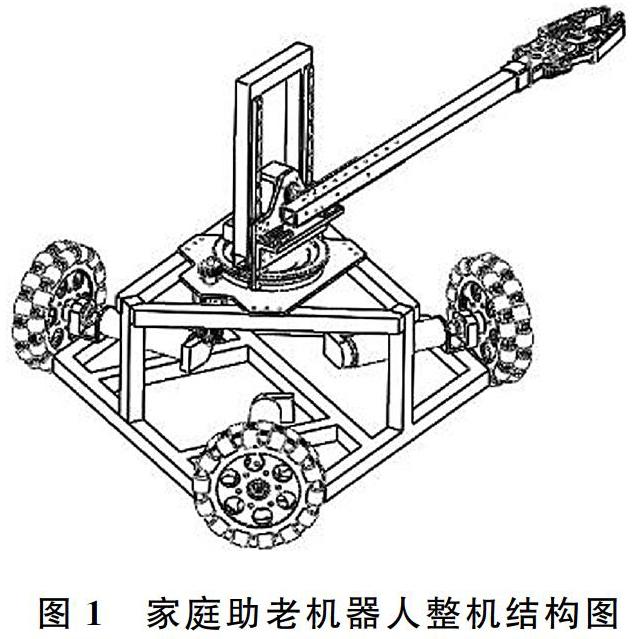
家庭助老式機器人底盤采用三角底盤,結構簡單、運動靈活。三個萬向輪分別固定于三角底盤的一端。如圖2所示,為所設計的家庭助老機器人的底盤部分。
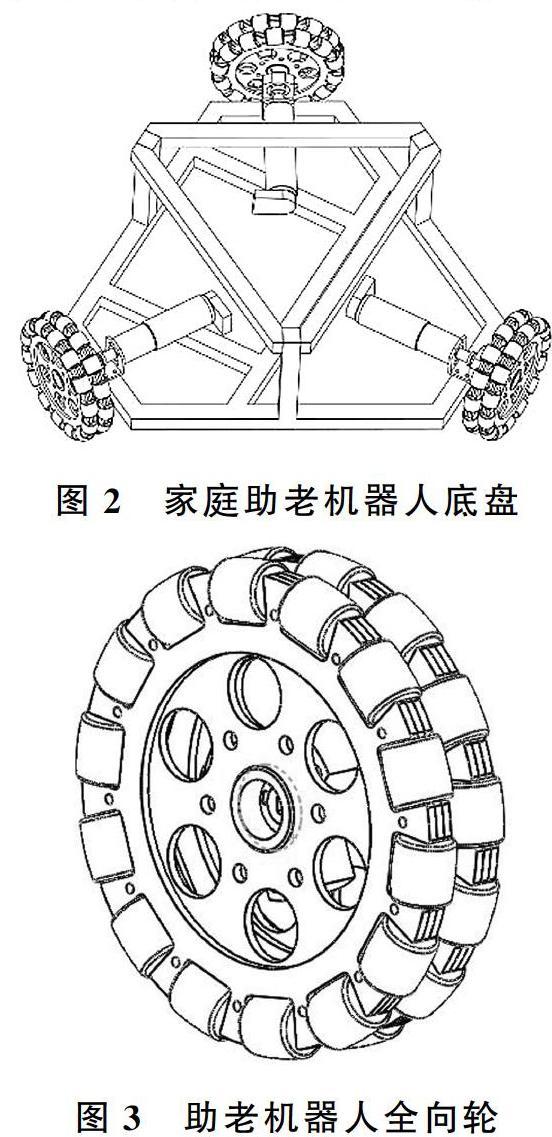
在機器人車輪的設計上,常見的有球形輪、麥克納姆輪和萬向輪。球形輪由于其控制難度大,故而在業內很少采用。麥克納姆輪的結構設計和運動控制相對而言都較簡單,故而在有全向移動要求的機器人中使用較為廣泛。但是,由于其與地面接觸時接觸點不連貫,而且只有一個可控運動自由度,導致在運行行進的過程中常出現打滑和噪聲,造成運動效率低下,使用率也越來越低。而全向輪正好克服了上述兩種產品的缺點,采用該全向輪的服務機器人可以很好地完成多種形式的運動,并且無噪聲和側滑現象的發生。如圖3所示,為所設計的家庭助老機器人所采用的全向輪。
本文所設計的家庭式助老機器人采用的全向輪,其運動靈活、控制簡單可靠,可以勝任輪式機器人的多種移動任務。在該助老機器人的控制程序中,封裝有多個相關的運動狀態控制函數,可對該助老機器人實行全部的置態控制。全向輪采用步進電機驅動,步進電機的可控角位移方式使的在機器人控制過程中不僅可以控制其運行速度,還可精準地控制機器人全向輪的運行距離。通過上位機根據對地形的實施掃描和分析所作出的位姿規劃,對三個輪的驅動系統分別實施控制,就可以實現機器人精確運動的效果。機器人的整個控制系統通過一個通信控制線程,就可以實現與機器人其他平臺的無縫連接,數據移植性極高。
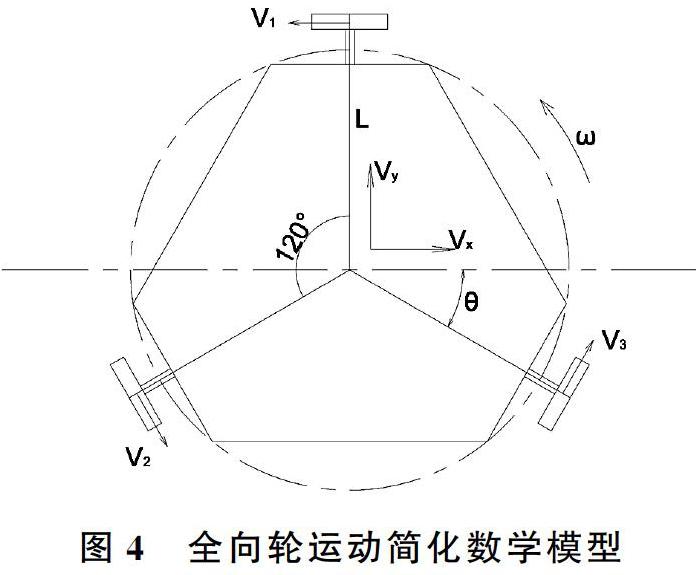
本文采用經典的三輪全向輪布置結構,機器人的三個全向輪的軸線成 120°角分布,全向輪中心相交于一個圓的圓心上,全向輪的旋轉方向與圓相切。簡化后的運動學數學模型如圖4所示。
圖中,V1、V2、V3分別表示為助老機器人的三個全向輪的轉速, Vx、Vy分別表示為助老機器人的底盤相對于世界坐標系的宏觀移動速度,ω表示為助老機器人底盤的自轉角速度,L 表示為輪子中心到圓心的垂直投影距離,θ表示為輪軸與 x 軸的夾角。機器人的三個全向輪在圓周方向均勻分布,即各車輪安裝角度相隔120°。則機器人的各輪速度轉換矩陣表示為:
解算后可得各車輪的轉速 V1、V2、V3 的表達式:
機器人的各全向輪由步距角為1.8°的42型步進電機驅動其轉動,可實現更精確的全向輪可控角位移,即每個脈沖可以控制電機軸轉動 1.8°,200 個脈沖使電機軸完成圓周運動。通過對脈沖數的統計和輪子外徑的技術,即可求得單個輪子的位移。從而通過對上位機運動的合成計算即可求得整個助老機器人底盤的移動速度,以及其移動方向。
1.2?助老機器懸臂結構設計
按照手臂的坐標形式劃分,常見的機械手主要有以下四種:直角坐標式、圓柱坐標式、球坐標式和關節式。其中,直角坐標式機械手的運動空間通過相互垂直的直線運動來實現。但是,直角坐標機械手的運動空間相對機械手的結構尺寸來講較小,且對于本文所設計的助老機器人而言極不靈活。想要了實現一定的運動空間,其結構尺寸要比其他類型的機械手大得多。圓柱坐標機械手由一個回轉運動及兩個直線運動來實現其預定運動軌跡。這種機械手構造相對簡單,精度適中,其工作空間是一個圓柱狀的空間。球坐標機械手的空間運動由兩個回轉運動和一個直線運動實現。這種機械手結構簡單、成本較低,但精度不很高,不適合本文所設計的助老機器人。關節型機械手的空間運動由三個回轉運動實現。其動作靈活、結構緊湊,占地面積小。相對機械手本體尺寸,其工作空間比較大。本文所設計的家庭式助老機器人采用圓柱坐標和直線坐標相結合的形式,不僅精度高、控制簡單,而且運動靈活。機器人懸臂與底盤的連接點采用鉚釘固定的方式,機械臂的末端連接機器人抓取機構。如圖5所示,為所設計的家庭式助老機器人的手臂機構。
懸臂下端由電機驅動一對齒輪輪組轉到,使懸臂結構整體圍繞從動齒輪軸轉動。懸臂結構上橫梁的上下、前后移動分別由一對齒輪齒條機構驅動。
根據上述家庭式助老機器人的結構組成及其工作原理可知,機器人的懸臂結構有4個自由度,包括兩個移動副和兩個旋轉副。通過對家庭式助老機器人進行空間位姿運動學的數學建模分析,建立起懸臂結構末端處的抓取機構與其他各關節之間的關系,利用懸臂桿件之間關節變換關系推導出懸臂末端抓取機構的位姿變換矩陣。所以,在機器人上的每一個部件規定了參考坐標系和關節變化量,懸臂上的每兩個關節之間即可產生一個自由度。實驗分析由懸臂結構上各運動部件之間的相對變化關系,推導出了抓取機構的最后位姿形態。
1.3?老機器抓取結構設計
結合上述各類機械手的優缺點分析,本文所設計的抓取機構采用圓柱和關節相結合的方式。如圖6所示,為所設計的家庭助老機器人的抓取機構。
抓取機構由一對對稱布置的齒輪組,驅動一對平行四邊形機構以實現抓取作業,齒輪組中有一個為主動輪。由平行四邊形的對邊平行的性質可知,抓取機構的外側桿永遠平行于抓取機構的主軸軸線。外側桿的伸長部分實施對物體的抓取作業。
2?仿真分析
所設計家庭式助老機器人的底盤不僅承受來自被抓取物體的重量,而且有機器人自身的重量。由于其三角底盤的主骨架采用鋁合金角鋼焊接而成,故而需要對其結構的強度進行仿真和分析。機器人懸臂有四個自由度,需要對各關節的運動進行模擬仿真。
2.1?助老機器人底盤支架有限元仿真
經對懸臂結構的架體、電機、齒輪齒條,和抓取機構的統計計算,總重59.2kg。所設計機器人預抓取重量為40kg。將抓取重量和懸臂自重值施加于機器人底盤支架上,得到等效應力云圖(圖 7)、 等效應變云圖(圖 8) 和變形云圖(圖 9)。由變形云圖可知,該底盤支架最大變形發生在支架上端三角的兩根橫梁上,最大變形量為2.12mm。由等效應力云圖和等效應變云圖可知,最大應力和最大應變都發生在上方三角形和低端六邊形的相切處。考慮到家庭式助老機器人的工作用途,為了進一步增強其安全可靠性,在三角形梁的下端增加立柱支撐。
2.2?助老機器人懸臂空間位姿的運動學模型仿真
由上述內容所確立的助老機器人懸臂結構的D-H坐標系和參數,對其懸臂結構在Matlab軟件建進行數學建模后,根據家庭式助老機器人懸臂末端抓取機構預定的位姿和軌跡參數方程,利用Matlab/Robotics Toolbox軟件對機器人懸臂進行逆運動學分析。繪制的各關節旋轉、位移曲線如圖10所示。
3?結論
本文設計了一款輕便智能、運動靈活、簡潔方便、安全性高的家庭式助老機器人。首先建立了助老機器人的三維模型,包括機器人底盤部分、機器人手臂機構、機器人抓取機構。并求得底盤部分各全向輪的速度表達式和機器人懸臂的D-H位姿運動方程組,對機器人懸臂進行建模后,利用Matlab/Robotics Toolbox軟件對該機器人懸臂進行逆運動學分析。證明了所設計機構的可行性與合理性。并對機器人底盤受力變形大的區域進行了結構優化。
參考文獻
[1]孟正大.助老助殘服務機器人家庭環境下標簽的識別[J]計算機與數字工程,2008,(11).
[2]王曙光.移動機器人原理與設計[M].北京:人民郵電出版社,2013:32-38.
[3]吳志志.三輪全向移動機器人的同時定位與地圖創建 [D].成都:西南科技大學,2018.
[4]周錦華,武建新,安建飛,等.懸臂式低壓鑄造機的設計及運動學分析[J].鑄造技術,2017.
[5]王慰軍,楊桂林,張馳,等.一種基于驅動萬向輪的全向移動平臺設計[J].機械傳動,2019.
[6]劉勇,呂艷輝,白云裳,等.三輪全向輪機器人底盤控制與分析[J].中國新通信,2018.
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年13期)2021-07-28 07:15:50
裝備制造技術(2019年12期)2019-12-25 03:06:04
專用汽車(2016年5期)2016-03-01 04:14:49
中國房地產業(2016年2期)2016-03-01 01:25:23
中國房地產業(2016年24期)2016-02-16 06:10:22
中國衛生標準管理(2015年17期)2015-01-26 21:05:18
振動、測試與診斷(2014年4期)2014-03-01 01:14:06
無錫職業技術學院學報(2013年3期)2013-03-11 19:01:14