
基于STM32茶葉紅外殺青機溫濕度模糊控制系統(tǒng)設計
2020-10-13 05:20:56裴剛黃俊仕艾施榮虞文俊熊愛華金山峰
現(xiàn)代電子技術 2020年19期
裴剛 黃俊仕 艾施榮 虞文俊 熊愛華 金山峰


摘? 要: 殺青是茶葉加工過程的第一道關鍵工序,其中殺青過程中溫濕度的精確控制是保證茶葉品質(zhì)的關鍵。為提高茶葉品質(zhì),保證茶葉殺青充分,又不產(chǎn)生大量枯葉,基于STM32單片機,采用模糊PID和PWM溫濕度閉環(huán)控制系統(tǒng),輸入量為實際溫濕度與上限值的偏差值,用輸出量PWM值控制風扇轉速及紅外加熱管功率,達到精確控制滾筒殺青所規(guī)定的溫濕度,并由Matlab進行仿真驗證。結果表明,采用模糊PID和PWM溫濕度閉環(huán)控制系統(tǒng)能精確控制滾筒內(nèi)的溫濕度值,溫度誤差控制在2 ℃以內(nèi),濕度誤差控制在3%RH以內(nèi),可防止殺青葉因溫度降低過慢而被燒焦,滾筒內(nèi)濕度過高被悶黃等現(xiàn)象,滿足茶葉殺青工藝要求,從而保證茶葉品質(zhì)。
關鍵詞: 模糊PID控制; STM32; 茶葉殺青; 溫濕度控制; 系統(tǒng)設計; 仿真驗證
中圖分類號: TN209?34; TN876? ? ? ? ? ? ? ? ? ? ?文獻標識碼: A? ? ? ? ? ? ? ? ? ? 文章編號: 1004?373X(2020)19?0079?05
Abstract: Water?removing is the first important step of tea processing. As a key process, the accurate control of temperature and humidity is directly related to the quality of tea. In order to improve tea quality and ensure that the fresh tea leaves are fully water?removed without a large amount of bad leaves, a temperature?humidity closed?loop control system combining fuzzy PID and PWM is used to control the rotate speed of fan and the power of infrared heating tube on the basis of STM32 SCM, so as to achieve accurate control of the temperature?humidity values in the roller of water?removing machine. The deviation between the actual temperature/humidity and the upper limit is taken as the input, and the PWM value is taken as output. The simulation verification of the system is carried out with Matlab. The results show the fuzzy PID and PWM closed?loop control system can accurately control the temperature and humidity in the roller; the temperature error is kept within 2 ℃ while the humidity error is within 3%RH. It also can prevent the phenomenon that tea leaves are burnt due to the slow fall of temperature or become sallow because of too high humidity in the roller. Therefore, it can meet the requirements of tea water?removing process and ensure the quality of tea.
Keywords: fuzzy PID control; STM32; tea water?removing; temperature?humidity control; system design; simulation verification
0? 引? 言
殺青是綠茶初加工的第一道關鍵工序,其中殺青溫度和濕度直接影響成品茶葉的品質(zhì)[1],因此綠茶殺青過程中溫濕度的精確控制非常重要。目前,茶葉殺青過程中溫濕度的控制主要由制茶師憑經(jīng)驗控制,溫濕度控制波動大,嚴重影響茶葉品質(zhì)。因此,研發(fā)茶葉加工機械的自動控制系統(tǒng),實現(xiàn)茶葉殺青過程中溫濕度的精確控制,對于提升茶葉品質(zhì)具有重要意義。
在自動控制領域,一般采用位式控制,通過設定上限值,比較當前值與上限值的大小控制繼電器的開閉。位式控制編程簡單,但因熱源的慣性作用,溫度會繼續(xù)上升,從而使茶葉殺青過程中的溫度難以精確控制。模糊PID控制算法在傳統(tǒng)PID算法基礎上,引入模糊控制規(guī)則,以實現(xiàn)精確控制的目的[1?3]。文獻[1]采用PID算法,開發(fā)了茶葉殺青機PLC溫度控制系統(tǒng),以減少電機和熱源的慣性作用。文獻[2]采用模糊控制PID算法,實現(xiàn)殺青溫度的精確控制。文獻[3]采用自適應模糊PID控制算法,使殺青溫度處于恒定值。上述研究只考慮了溫度的精確控制對殺青葉質(zhì)量的影響,并沒有考慮濕度的影響。文獻[4]利用模糊推理合成規(guī)則,提出一種有效的交叉解耦手段,達到精確控制溫濕度的目的。文獻[5]設計了一種基于模糊PID解耦算法的多功能禽舍環(huán)境控制系統(tǒng),實現(xiàn)了對禽舍內(nèi)溫濕度的精確控制。
本文提出采用模糊PID算法對茶葉殺青滾筒內(nèi)的溫度和濕度同時控制,通過設置溫濕度的上限值實現(xiàn)去濕風扇電機啟停和紅外管開閉的精確控制,達到殺青過程中滾筒內(nèi)溫濕度同時精確控制的目的。系統(tǒng)以STM32為開發(fā)平臺,在上位機設置溫濕度上限值,由模糊PID算法控制滾筒內(nèi)溫濕度值達到上限值前做出響應,自動控制電機轉速和紅外管發(fā)熱功率,使溫濕度始終保持在上限值附近,以達到對溫濕度進行精確控制的目的。進一步由Matlab建立控制系統(tǒng)的溫濕度一階傳遞函數(shù)模型并進行仿真,探索模糊PID算法對茶葉殺青過程中溫濕度精確控制的可行性。
1? 茶葉紅外殺青機整體結構及特點
茶葉紅外殺青機的整體結構由滾筒、托輪、紅外輻射傳感器、紅外測溫傳感器、濕度傳感器、驅(qū)動裝置、風扇、支架及控制系統(tǒng)等組成,其結構示意圖如圖1所示。滾筒由托輪橫向支撐在支架上,其內(nèi)部焊有導板、長條形導葉板和螺旋導葉片,以增強滾筒對茶葉的翻拋作用。紅外輻射傳感器、紅外測溫傳感器、濕度傳感器固定于一根不銹鋼空心管上,并懸掛于滾筒中心。茶葉進料口和出料口置于滾筒右側,由電機正反轉驅(qū)動滾筒正反轉,以實現(xiàn)鮮茶葉在滾筒內(nèi)來回殺青,提高殺青效率。排濕風扇固定于帶輪上的右側面,由帶輪傳動實現(xiàn)風扇的正反轉,風扇反轉實現(xiàn)滾筒內(nèi)的排濕作用,風扇正轉協(xié)助殺青葉快速出料,以防止燒焦。
2? 茶葉紅外殺青機控制系統(tǒng)工作原理
首先,在上位機上設置滾筒內(nèi)殺青溫度規(guī)定的上限值、濕度上限值及殺青時間,同時在上位機設置定時器以控制殺青時間,將溫濕度上限值由串口傳輸給STM32并發(fā)送指令,讓STM32導通紅外管的光電耦合繼電器,殺青機滾筒開始預熱,當殺青機滾筒內(nèi)溫度達到溫度上限值時,提示將鮮茶葉送入滾筒內(nèi),開始殺青。上位機給STM32發(fā)送指令,啟動定時器,并計時,滾筒在5 s為一個周期的時間內(nèi)做正反轉的周期運動,使殺青茶葉受熱均勻并保持翻炒狀態(tài)。在殺青過程中,溫濕度傳感器不斷獲取滾筒內(nèi)當前的溫濕度值,模糊PID算法根據(jù)當前溫濕度值與上限值的偏差及偏差變化率決定輸出PWM值的大小,由PWM值精確控制風扇轉速及紅外管的發(fā)熱功率。鮮茶葉在滾筒正反轉動下均勻吸收熱量使其溫度上升而散發(fā)出水分,當濕度傳感器檢測到濕度超過上限值時,開啟風扇排濕。當規(guī)定的殺青時間到,上位機給控制器發(fā)送一個指令,風扇全速反轉,將殺青茶葉排出,完成一次殺青過程。
3? 茶葉紅外殺青機溫濕度控制系統(tǒng)設計
3.1? 控制系統(tǒng)方案設計
3.1.1? 總體框圖
茶葉紅外殺青機溫濕度控制系統(tǒng)總體框圖如圖2所示,系統(tǒng)控制芯片為STM32,設置滾筒內(nèi)規(guī)定的殺青溫度和濕度上限值,由溫濕度傳感器采集滾筒內(nèi)的溫度和濕度值。計算采集的溫濕度與設置的上限值的偏差及偏差變化率,通過模糊PID算法中的比例、微分和積分運算,輸出PWM值,通過PWM值控制溫度光電耦合繼電器開閉的頻率,從而控制紅外管的功率,實現(xiàn)紅外管溫度的控制,同時利用PWM值控制風扇電機轉速,將滾筒內(nèi)的溫度精確快速排出。
3.1.2? 硬件電路設計
硬件電路由單片機最小系統(tǒng)、溫度采集電路、濕度采集電路、紅外管和直流電機驅(qū)動電路等組成,其電路圖如圖3所示。本設計采用STM32F103ZET6芯片作為MCU,溫度采集傳感器采用MAX6675,濕度采集傳感器采用DHT11,直流驅(qū)動電路采用L293D芯片。L293D屬于H橋集成電路,可以同時控制兩路電機,實現(xiàn)調(diào)速和正反轉。
3.1.3? 溫濕度控制系統(tǒng)控制原理
本文采用模糊PID算法控制滾筒內(nèi)殺青溫度上升到所規(guī)定上限值時,紅外管完全熄滅,避免由于熱慣性作用繼續(xù)加熱使溫度繼續(xù)升高產(chǎn)生過熱現(xiàn)象,導致滾筒內(nèi)溫度控制不準確。由PID控制滾筒內(nèi)濕度上升到所規(guī)定上限值時,風扇全速轉動,避免因電機啟動時間過長導致滾筒內(nèi)濕度不能及時排出,使?jié)L筒內(nèi)濕度控制不準確。溫度和濕度控制流程圖如圖4所示。
控制原理如下:在上位機設置溫度和濕度上限值,由串口將溫度和濕度上限值傳輸?shù)絊TM32控制系統(tǒng),當實際溫度小于其上限值時,將溫度與其上限值的偏差由PID算法控制PWM的輸出,以控制紅外管的功率,實現(xiàn)滾筒內(nèi)溫濕度的及時調(diào)整,將濕度與其上限值的偏差由PID算法控制PWM輸出,控制排濕風扇電機轉速,從而精確控制滾筒內(nèi)的溫度。
3.2? 控制算法設計
3.2.1? 經(jīng)典PID控制算法
本文采用模糊PID算法實現(xiàn)溫度、濕度的精確控制,輸入量為溫濕度的偏差值[e],輸出量為PWM值[u]。經(jīng)典PID控制算法公式如下[6]:
式中:[Kp]為比例系數(shù);[Ki=Kp?TTi]為積分系數(shù);[Kd=Kp?TdT]為微分系數(shù);[e(k)]為第[k]次采樣時溫濕度偏差值;[e(k-1)]為第[k-1]次采樣時溫濕度偏差值;[e(k-2)]為第[k-2]次采樣時溫濕度偏差值。通過反復實驗,得出溫度PID比例系數(shù)為1、積分系數(shù)為0.03、微分系數(shù)為0.01;濕度PID比例系數(shù)為1、積分系數(shù)為0.05、微分系數(shù)為0.01。
3.2.2? 自適應模糊PID算法控制原理
鮮茶葉在殺青過程中溫濕度必須實現(xiàn)精確控制,才能保證茶葉品質(zhì)。而經(jīng)典PID算法,其參數(shù)[Kp],[Ki],[Kd]的值為常量,不能調(diào)節(jié),導致溫濕度調(diào)節(jié)時間過長,超調(diào)量加大,不能精確控制殺青過程中的溫濕度。如果溫濕度波動很大,會導致殺青葉燒焦,或殺不透,甚至產(chǎn)生悶黃現(xiàn)象,直接影響茶葉品質(zhì)。而自適應模糊PID算法能對算法中的參數(shù)([Kp],[Ki],[Kd])進行動態(tài)修正,使系統(tǒng)始終處于最優(yōu)控制狀態(tài)[7?9],從而保證殺青過程中溫濕度的精確控制。模糊PID算法控制原理框圖如圖5所示。圖中,[e]是當前實際值與設定上限值的誤差,[ec]是當前實際值與設定上限值的誤差變化率。[Kp],[Ki]和[Kd]值由式(2)~式(4)計算。
1) 模糊化:將輸入量乘以一個增益系數(shù)反映到論域上,綠茶殺青溫度需控制在240~280 ℃之間,殺青濕度需控制在58%RH~64%RH之間,為確保殺青溫度控制在一個恒定值,溫度偏差[e]論域取[0,40],溫度偏差變化率[ec]的論域取[0,2],濕度偏差[e]的論域為[0,10],濕度偏差變化率[ec]的論域為[0,3],即在茶葉殺青過程中溫度偏差控制在2 ℃以內(nèi),濕度偏差控制在3%RH以內(nèi)。將溫濕度誤差變化率,[ΔKp],[ΔKi],[ΔKd]用7個等級表示,即{NB,NM,NS,Z,PS,PM,PB},建立隸屬度函數(shù),圖6是溫度誤差、誤差變化率及濕度誤差、誤差變化率的隸屬度函數(shù)圖,用三角形曲線表示。
2) 模糊推理:建立模糊規(guī)則表,根據(jù)模糊規(guī)則表得到修正量[ΔKp],[ΔKi],[ΔKd],表1列出了對溫濕度偏差及偏差變化率的修正量。
3) 解模糊:找出[Kp],[Ki],[Kd]與溫濕度偏差[e]及其偏差變化率[ec]之間的關系,不斷檢測殺青機過程中溫濕度與其上限值的偏差[e],計算其偏差變化率[ec],通過模糊控制原理,對3個參數(shù)進行在線修正,對照模糊控制表,得到3個修正量[ΔKp],[ΔKi],[ΔKd],由式(2)~式(4)計算當前[Kp],[Ki],[Kd]的值。
4? Matlab仿真
4.1? 傳遞函數(shù)的獲得
根據(jù)經(jīng)驗,對自適應對象可使用一階系統(tǒng)慣性純滯后公式,即[G(s)=K*e-τs(t0s+1)],建立溫度、濕度的傳遞函數(shù)數(shù)學模型。由科恩?庫恩公式[8]得到被控對象溫度的傳遞函數(shù)模型為[0.3e-19s(60s+1)],濕度的傳遞函數(shù)模型為[0.5e-10s(48s+1)]。
4.2? 經(jīng)典PID控制仿真
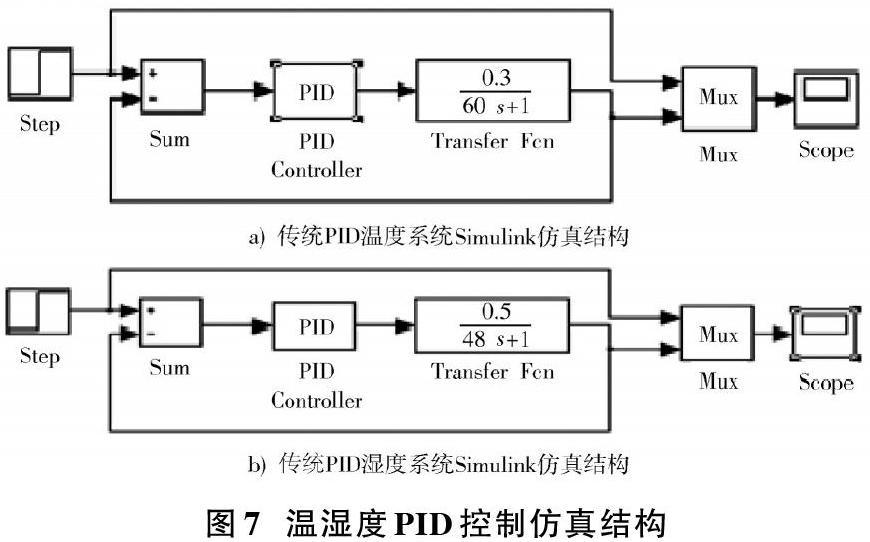
根據(jù)PID調(diào)節(jié)規(guī)律,將整定的系數(shù)[Kp],[Ki],[Kd]輸入到PID Controller,輸入信號為一個階躍函數(shù),利用Matlab的Simulink平臺對PID算法進行仿真,溫度的傳遞函數(shù)模型為[0.3e-19s(60s+1)]、濕度的傳遞函數(shù)模型為[0.5e-10s(48s+1)],對兩個傳遞函數(shù)模型運用Simulink對溫濕度進行仿真,如圖7所示,溫濕度PID控制仿真結果如圖8所示。
由圖8可看出,傳統(tǒng)PID溫度系統(tǒng)調(diào)節(jié)時間[ts=]350 s,超調(diào)量[σ=]1.25%,穩(wěn)態(tài)誤差[ess=0]。傳統(tǒng)PID濕度系統(tǒng)調(diào)節(jié)時間[ts=]300 s,超調(diào)量[σ=]6.67%,穩(wěn)態(tài)誤差[ess=0]。由此可見,傳統(tǒng)PID控制系統(tǒng)調(diào)節(jié)時間過長,超調(diào)量過大,導致溫濕度不能精確控制[9?10]。
4.3? 模糊PID控制仿真
使用Simulink中的模糊控制器對模糊PID系統(tǒng)進行仿真,溫濕度Simulink仿真結構如圖9所示,溫濕度的階躍響應函數(shù)如圖10所示。
由圖10可知,模糊PID溫度系統(tǒng)調(diào)節(jié)時間[ts=]230 s,超調(diào)量[σ=]2.66%,穩(wěn)態(tài)誤差[ess]=0。模糊PID濕度系統(tǒng)調(diào)節(jié)時間[ts=]240 s,超調(diào)量[σ=]0%,穩(wěn)態(tài)誤差[ess]=0,相較于傳統(tǒng)PID控制,溫度超調(diào)量減少了1.4%,但調(diào)節(jié)時間減少了120 s,濕度超調(diào)量減小到0%,減小了6.67%,調(diào)節(jié)時間減少了60 s,溫濕度得到更精確的控制。
5? 結? 語
本文采用模糊PID算法精確控制殺青機滾筒內(nèi)的溫濕度變化,并由Matlab仿真平臺對滾筒內(nèi)的溫濕度進行仿真。結果表明,較傳統(tǒng)PID控制算法,采用模糊PID算法進行滾筒內(nèi)的溫濕度控制,系統(tǒng)調(diào)節(jié)時間分別減少了34.3%,20.0%,超調(diào)量分別減少了1.4%,6.67%。防止鮮茶葉殺青過程中降溫過慢而被燒焦,以及滾筒內(nèi)濕度過高不能及時排出而產(chǎn)生悶黃現(xiàn)象,保證茶葉的品質(zhì)。本系統(tǒng)溫度誤差控制在2 ℃以內(nèi),濕度誤差控制在3%RH以內(nèi),滿足對茶葉殺青的要求。
注:本文通訊作者為黃俊仕。
參考文獻
[1] 葛良志,曹成茂,吳正敏.基于PLC的茶葉滾筒殺青機溫度控制系統(tǒng)設計[J].安徽農(nóng)業(yè)大學學報,2015,42(4):647?650.
[2] 曹成茂,吳正敏,梁閃閃,等.茶葉殺青機雙模糊控制系統(tǒng)設計與試驗[J].農(nóng)業(yè)機械學報,2016,47(7):259?265.
[3] 郝朝會,孫傳祝,蘇夏侃.自適應模糊PID控制在茶葉殺青機中的應用[J].農(nóng)機化研究,2013,35(2):201?204.
[4] 林榮川,林河通,林清矯.采用交叉補償解耦的烏龍茶自動烘焙機溫濕度模糊控制[J].農(nóng)業(yè)工程學報,2012(20):80?87.
[5] 柴鈺,于全剛.基于模糊PID解耦算法的多功能禽舍環(huán)境控制系統(tǒng)設計[J].家畜生態(tài)學報,2014(10):51?57.
[6] 顧蓉,王寶忠,劉浪.電鍍電源控制算法的研究與仿真應用[J].現(xiàn)代電子技術,2015,38(15):145?148.
[7] 庹朝永.大型船舶蔬菜儲藏倉庫自動控制系統(tǒng)設計[J].食品與機械,2014,30(6):128?131.
[8] 劉浩蓬,龍長江,萬鵬,等.植保四軸飛行器的模糊PID控制[J].農(nóng)業(yè)工程學報,2015,31(1):71?77.
[9] 楊保亮,張守良.基于STM32和PWM的鋰離子電池檢測系統(tǒng)設計和研究[J].現(xiàn)代電子技術,2018,41(12):120?123.
[10] 王學林,葛兆斌,孫潔,等.基于積分I+模糊PD并行的果蔬高速抓取控制[J].江蘇農(nóng)業(yè)科學,2011,39(3):551?554.
