斜巷運輸絞車與跑車防護裝置聯機控制研究
2020-10-14 08:13:14翟建財
煤 2020年10期
翟建財
(潞安集團 山西潞陽煤炭投資經營管理有限公司,山西 晉中 045400)
斜巷運輸在礦山生產中難以避免,但由于巷道存在一定角度,因而斜巷運輸中受到各種因素影響,容易出現跑車事故,斜巷運輸能否安全運行直接關系著礦井運輸系統的安全[1-3]。《煤礦安全規程》中對斜巷運行系統中應有的防護措施也進行過明確規定。文中以山西某礦1806斜巷為工程背景,針對斜巷運輸現狀對運行防護系統進行改進,實現跑車防護裝置、絞車控制聯機運行,從而在一定程度上提升了礦井斜井運輸安全保障能力。
1 斜巷運輸概述
1806斜巷主要服務于+850 m水平,擔負矸石、材料運輸任務,斜巷傾角為10°,長度為360 m,考慮到巷道圍巖控制需要,挖掘的絞車房空間較小,運輸采用的JYB型液壓絞車,滾筒直徑800 mm。在斜巷運輸上平臺布置有1道防跑車攔車杠,并在斜巷內每間距200 m布置1道擺桿式防跑車裝置。若斜巷運輸出現跑車時,礦車先撞擊到擺桿下端,由于擺桿受到較大的沖擊作用導致鋼絲繩銷軸掉落,從而使得擺桿下方安裝的防護欄掉落,起到擋車作用,具體見圖1。
巷道內布置的防跑車裝置與絞車聯動通過人工控制方式實現,當礦車通過時需要安排專人控制跑車防治裝置,從而在一定程度上降低了斜巷運輸效率。具體在斜巷內采用礦井自制的防跑車裝置存在問題為[4-5]:
1) 靈敏度低。當斜巷內出現跑車事故時,擺桿動作時有時不能實現閉鎖插銷掉落,從而造成防護欄無法掉落,不能及時、精準攔截礦車。同時車輛正常通行時會撞擊到擺桿,可能會造成擺桿誤動作,需要安排專人進行處理;
2) 保護強度不足。由于在斜巷內僅依靠掉落的防護欄來阻擋礦車,有時會出現礦車阻擋不牢的問題,甚至不能有效攔截,造成跑車事故擴大化。
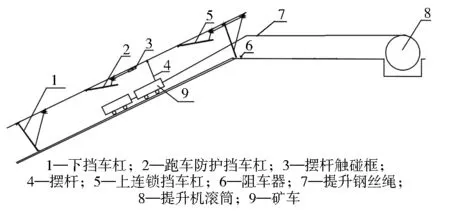
圖1 跑車防護裝置布置示意
2 聯機控制分析
2.1 聯機方案確定
傳統跑車防護裝置與絞車聯動通過編碼器實現,具體是通過光電軸編碼器實現絞車運行方向及運行速度判定,從而實現跑車防護裝置與絞車間的相互配合,見圖2。但是此種方式多是應用在滾筒直徑在1 600 mm及以上的絞車上。由于在1806斜巷內布置的絞車滾筒直徑僅為800 mm,采用編碼器來實現絞車與跑車防護裝置間聯動顯然不滿足要求[6]。
為了實現絞車與跑車防護裝置間聯動,只需尋找一種可以監測絞車滾筒運行的距離傳感器來代替傳統的光電編碼傳感器即可,通過監測絞車滾筒運轉方向、速度及圈數即可判定礦車所處位置、實現絞車與跑車防護裝置間聯動。霍爾傳感器是工業領域中常用的傳感器、具有適用性強、測量精度高等優點,因此,文中提出采用霍爾傳感器來監測絞車運行[7]。具體現場應用方案為:
在1806斜巷內采用JD型絞車,根據絞車結構特點選擇將雙線制霍爾傳感器(GL-GUH12型)置于絞車運通與電動機相連一側,并通過電纜與PLC控制器連接,PLC接收來自于雙線制霍爾傳感器監測數據,從而判定絞車運行狀態以及礦車位置,實現跑車防護裝置與絞車間聯動。具體雙線制霍爾傳感器安裝位置見圖3。
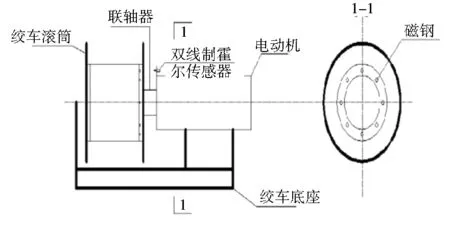
圖3 霍爾傳感器布置示意
2.2跑車防護裝置更換
將原有的礦井自制的防跑車裝置更換為ZDC30.25液壓自跑車防護裝置,并與絞車聯動,當絞車供電后ZDC30.25跑車防護裝置開始工作;絞車斷電后ZDC30.25跑車防護裝置停機運行。ZDC30.25跑車防護裝置通電開始運行后,根據雙線制霍爾傳感器監測到的絞車礦車位置ZDC30.25跑車防護裝置會自動判定是否需要將檔車欄下方,具體為:
1) 當絞車處于下行運行狀態時,ZDC30.25跑車防護裝置擋車欄處于常閉狀態,當礦車下行至與ZDC30.25跑車防護裝置相距20 m位置時PLC控制器控制防護裝置電機完成升欄操作;當絞車通過ZDC30.25跑車防護裝置10 m后PLC控制器控制防護裝置電機完成降欄操作,跑車防護裝置處于常閉狀態。
2) 當礦車溜車、跑車時,PLC控制器通過緩沖式擋車欄進行攔截,避免事故擴大。當有多個跑車防護裝置時,PLC控制器通過串聯方式通信,從而降低井下信號電纜鋪設長度。在絞車房旁布置的集中控制顯示屏可以顯示各跑車防護裝置、礦車運行情況。具體采用的ZDC30.25跑車防護裝置技術參數見表1。

表1 跑車防護裝置技術參數
2.3絞車與跑車防護裝置聯動控制
將斜巷內布置的跑車防護裝置改造為ZDC30.25型,通過雙線型霍爾傳感器(GL-GUH12)對絞車運行狀態進行監控,PLC控制器通過監控到的絞車運行情況控制跑車防護裝置運行,具體的聯動控制系統結構見圖4。硬件結構包括有通信模塊、PLC,通信采用現場總線方式。
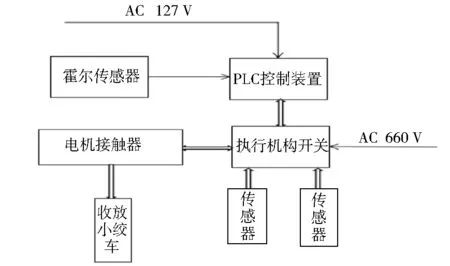
圖4 聯機控制結構
3 聯機控制應用特點
1) 通過絞車與跑車防護裝置聯動,可以根據不同情況選擇不同的控制方式,具體有手動、自動、提人、提物等不同操控方式,可根據具體需要進行選擇;在顯示屏上可以顯示擋車欄狀態以及礦車位置,同時聯通控制系統還具備故障警報、故障自動監測等功能。
2) 采用的雙線制霍爾傳感器抗干擾能力強、測量精度高,可顯著提升絞車運行監測效果;采用自動防跑車裝置(ZDC30-2.5)具有可靠性強、控制精度高等優點;通過PLC控制器將時間、速度控制精度提升至1 ms、0.01 m/s,顯著提升了聯動控制系統的控制能力;顯示屏可以顯示擋車欄運行狀態,提升礦車攔截效率。
3) 通過采用柔性擋車技術,使用新型柔性擋車欄、緩沖器且緩沖力度可根據需要調整,可根據使用環境調整緩沖器緩沖力。在擋車裝置上配備脫扣裝置,可以避免跑車攔截時擋車裝置損失,提高使用時限。
4 結 語
1) 在斜巷內對跑車防護裝置、絞車進行聯機控制,提高了斜巷運輸安全性,同時絞車過跑車防護裝置時實現自動控制,降低了運行人員勞動強度;采用的聯機控制系統具有自動操控精度、自動化程度高等特點,故障率低。
2) PLC控制器采用動態處理程序對霍爾傳感器監測到的絞車進行校對,并根據監測結果控制自動防跑車裝置(ZDC30-2.5)運行。在具體使用過程中應避免由于絞車滾筒受污染而造成霍爾傳感器監測精度降低問題。
