基于在軌CMG數據分析的敏捷機動衛星姿態規劃方法
2020-10-16 11:06:46蔣志雄關宏張晉呂高見朱琦
航天器工程 2020年5期
關鍵詞:規劃
蔣志雄 關宏 張晉 呂高見 朱琦
(北京控制工程研究所,北京 100094)
近年來,高穩定度成像、敏捷機動已成為新一代遙感衛星的重要功能。控制力矩陀螺(Congtrol Moment Gyro,CMG)具有力矩精度高、輸出力矩與角動量大的特點,是高穩定度敏捷機動航天器的關鍵產品[1]。
自2007年地球觀測(WorldView)系列衛星使用CMG作為執行機構[2],隨后法國昴宿星(Pleiades)采用金字塔構型的CMG系統以來,CMG及CMG群(CMGs)系統奇異規避及故障后重組成為了敏捷機動航天器的研究熱點[3],國內外科研人員針對CMG故障后的使用及處理,就構型、奇異和操縱律等方面進行了大量的研究[4-7]。
CMG產品的工作原理是通過框架轉動改變恒定慣量轉子的方向來產生輸出力矩,在輸出力矩的同時,轉子軸系承受著高轉速、交變陀螺力矩的影響,因此轉子軸系是制約CMG長壽命運行的關鍵組件,適當降低框架角速度和角加速度(以下統稱框架機動速率)可減輕對軸系的沖擊,有利于延長其運行壽命[8-9]。當星體以大角速度機動、角加速度頻繁變化時,需要CMG在大的框架機動速率下工作,增加了對框架軸系的沖擊,影響產品壽命,甚至影響衛星任務的執行。為避免此類現象發生,CMG的框架機動速率限制一直以來都是該類單機產品在軌使用的重要約束條件,并作為使用CMGs進行高穩定度敏捷機動控制航天器姿態規劃的實際約束制約著在軌任務的規劃。傳統的在軌任務規劃中,通常使用固定參數的姿態規劃方法[10],預估機動時間、判斷機動間隔,結合任務需要按照CMGs的最大機動能力分配各軌任務。
前期研究工作中,針對以CMG作為執行機構的敏捷機動衛星,以北京控制工程研究所內中小型CMG在軌使用、地面試驗情況為依據,分析了任務執行與CMGs框架機動速率的關系,結果表明:單機偶發異常與現行使用方式有關。
為改進使用方式,更有利于單機的長壽命運行,本文提出了一種基于機動時間可調因子的機動能力自主調節的在軌姿態規劃方法,定義CMGs輸出力矩小于其50%額定值時的工況為理想工況,并通過干預其可調因子,改善了航天器的機動需求,使CMGs在任務執行過程中的框架機動速率降低,達到理想工況條件。與傳統的使用固定參數進行姿態規劃的航天器在軌數據進行對比表明:本文使用的方法能夠提高CMG產品在機動過程中滿足理想工況的比例,最優解可提升至55%以上。
1 CMGs控制原理
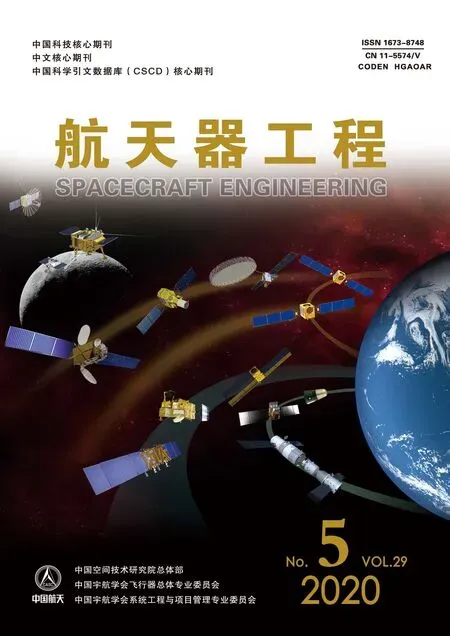
假設航天器上安裝的CMGs由4個單體組成,呈金字塔構型。CMGs構型及第i個單體框架坐標系OGiXGiYGiZGi如圖1所示。

(1)
式中:At為CMGs轉子橫向方向矩陣,用構型金字塔斜面傾角β和框架角表示。
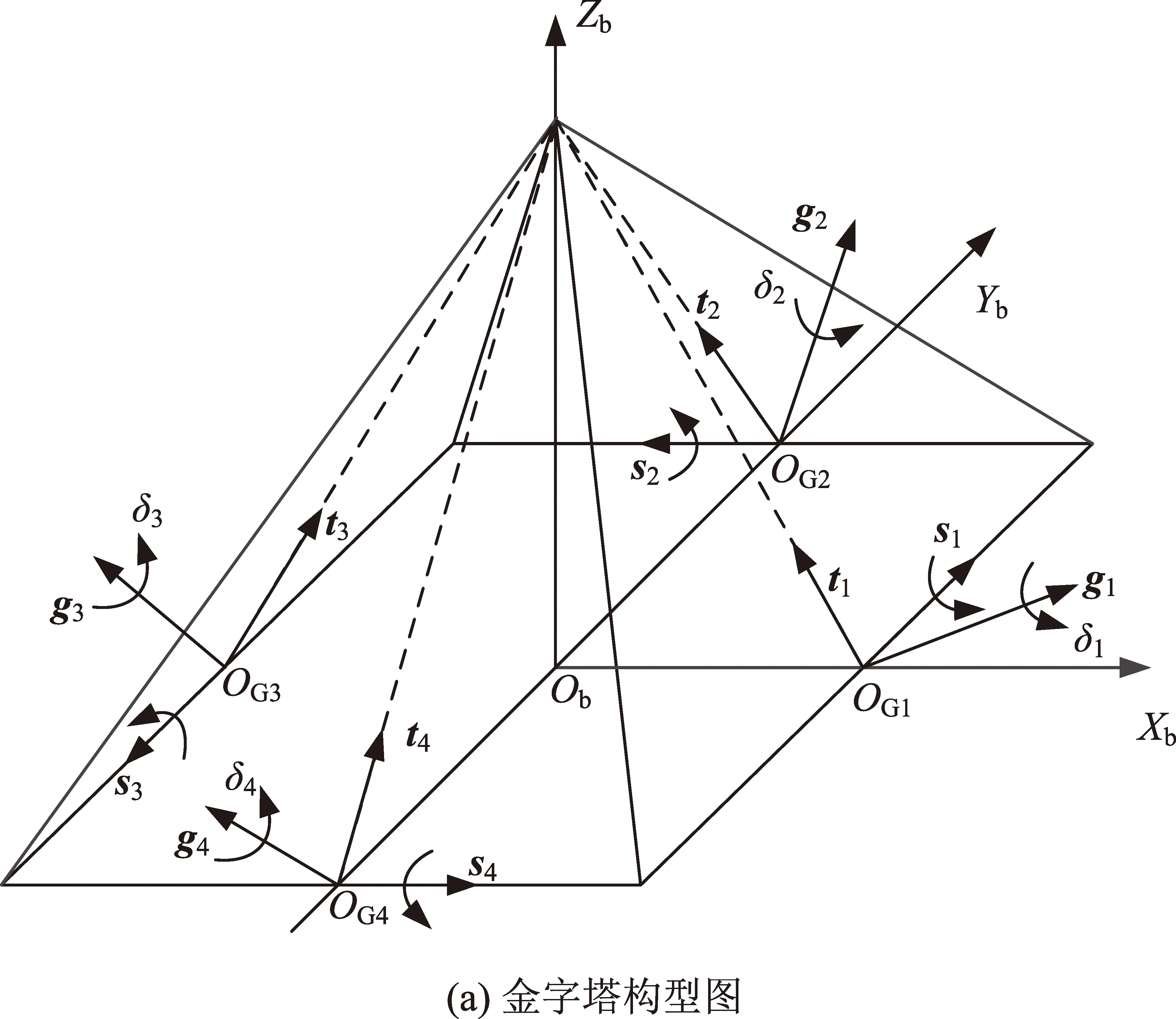
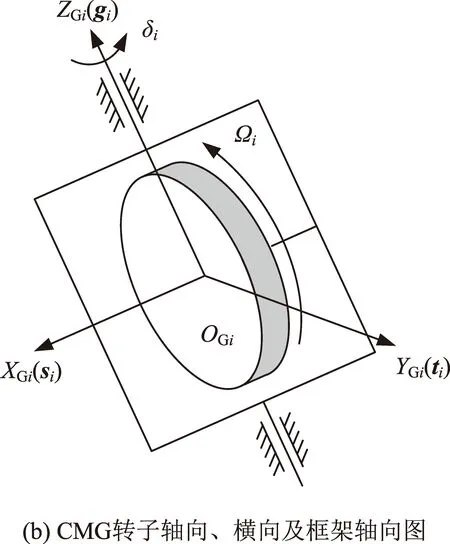
圖1 金字塔構型的CMGs及框架坐標系Fig.1 Pyramid structure and coordinate system of CMGs
(2)
如果CMGs指令力矩為TCMG,得到指令力矩要求的框架轉速向量為
(3)
航天器總角動量H方程可以簡化表示為
H=Itsωb+AtIwsΩs
(4)
式中:Its為系統轉動慣量,ωb為衛星姿態角速度,Iws=diag(Jws1,Jws2,Jws3,Jws4),為CMGs轉子轉動慣量對角陣,Ωs=[Ω1Ω2Ω3Ω4]為高速轉子角速度向量。根據角動量定理忽略環境干擾,系統姿態動力學可寫為
(5)

2 現有CMGs姿態規劃方式及在軌數據分析
目前應用CMGs作為執行機構的敏捷機動航天器,任務規劃算法的基礎是一種固定參數的姿態規劃方法,該方法根據CMG工作約束,將CMGs輸出力矩達到80%額定值時對應的星體角速度和角加速度定義為衛星的最大角速度ωCMG和最大角加速度αCMG,并據此進行機動時間分析和規劃在軌任務。本文依據北京控制工程研究所內中小型CMG在軌使用、地面試驗情況,將CMGs輸出力矩小于50%額定值時的工況定義為CMG理想工況。
這種固定參數的姿態規劃方法通常為正弦軌跡規劃算法,姿態機動的變速段和勻速段時長可寫為
(6)
式中:tacc為變速段時長,tsli為勻速段時長,χ為機動目標角。
根據CMGs控制原理,采用以上姿態規劃算法時,航天器在收到姿態任務后,按系統最大機動角速度進行姿態機動并完成在軌任務要求。以某次連續機動任務為例,航天器機動軌跡為(0,0)至(9,19),完成本次機動后第二次機動至(-9,-19)。衛星姿態角速度與CMG低速框架的變化見圖2。
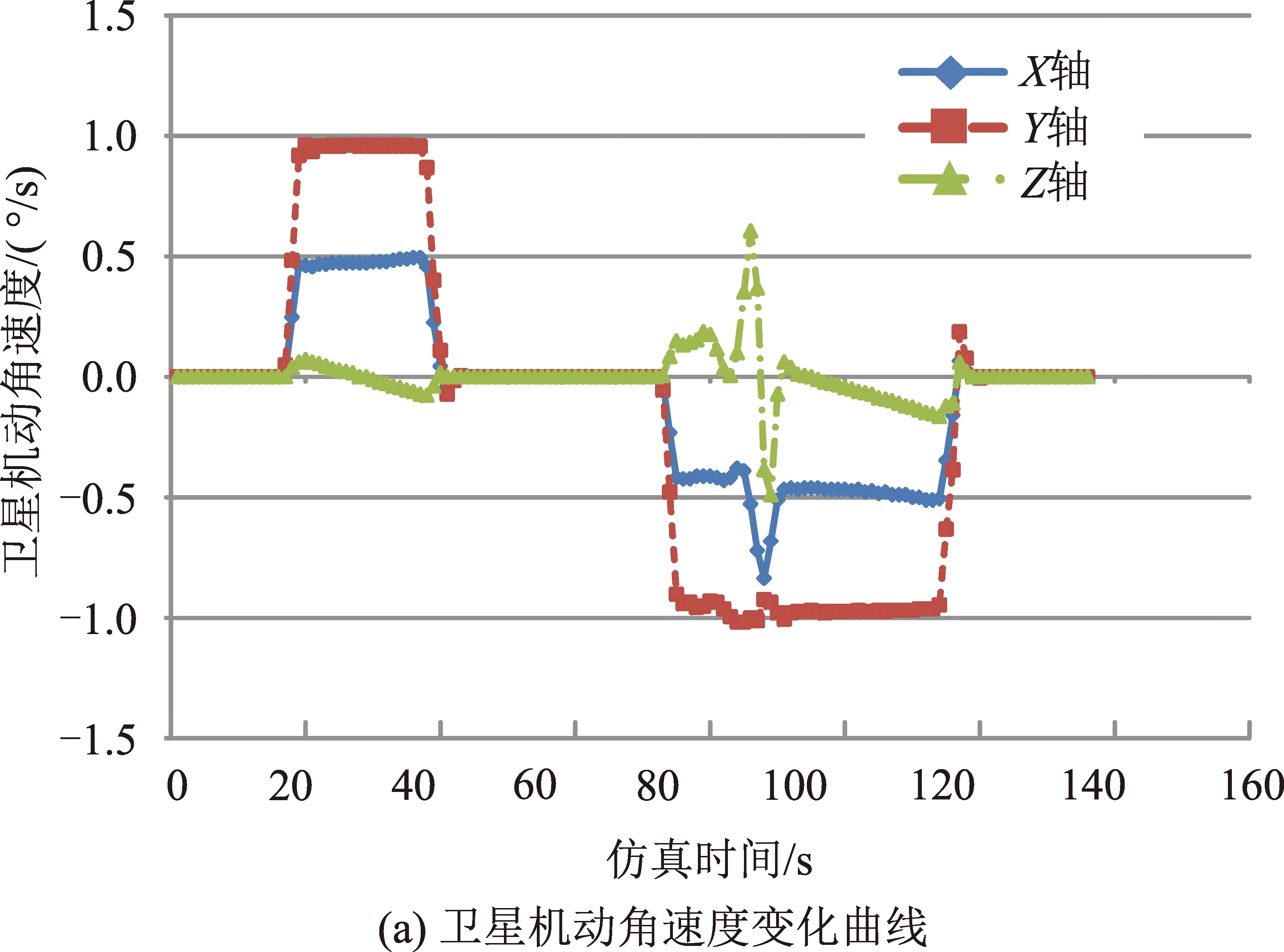
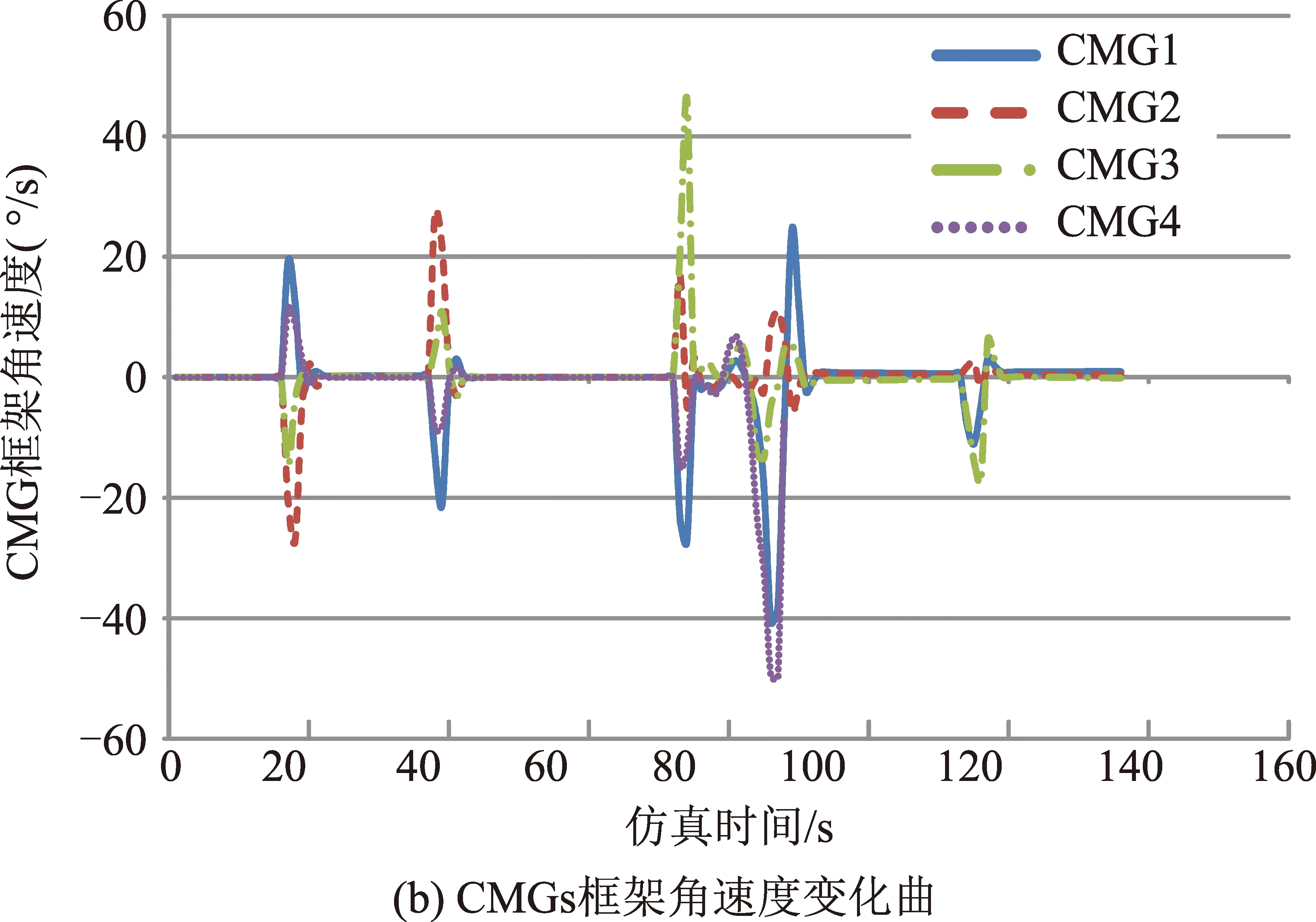
圖2 衛星機動角速度和CMG框架角速度變化Fig.2 Angular velocities of satellite and the gimbal of CMGs
如圖2所示,衛星機動最大角速度達到1(°)/s,且在第二次機動過程中CMGs進行了奇異規避運動,CMGs框架瞬時最大角速度達到49(°)/s,前次任務結束至本次任務機動時間間隔為30 s。
分析CMGs衛星在軌14 776個連續機動任務,包含單軸機動11 552次,雙軸機動3224次,最大機動角度55.17°,其中,合成機動角度為5°~10°的任務超過35%,小于5°的機動任務約占30%,10°~15°、15°~20°、20°~25°的機動任務所占比例均約為10%,超過25°的大角度機動任務所占比例小于5%,各合成機動角度(每5°一個區間)的出現頻次如圖3所示。
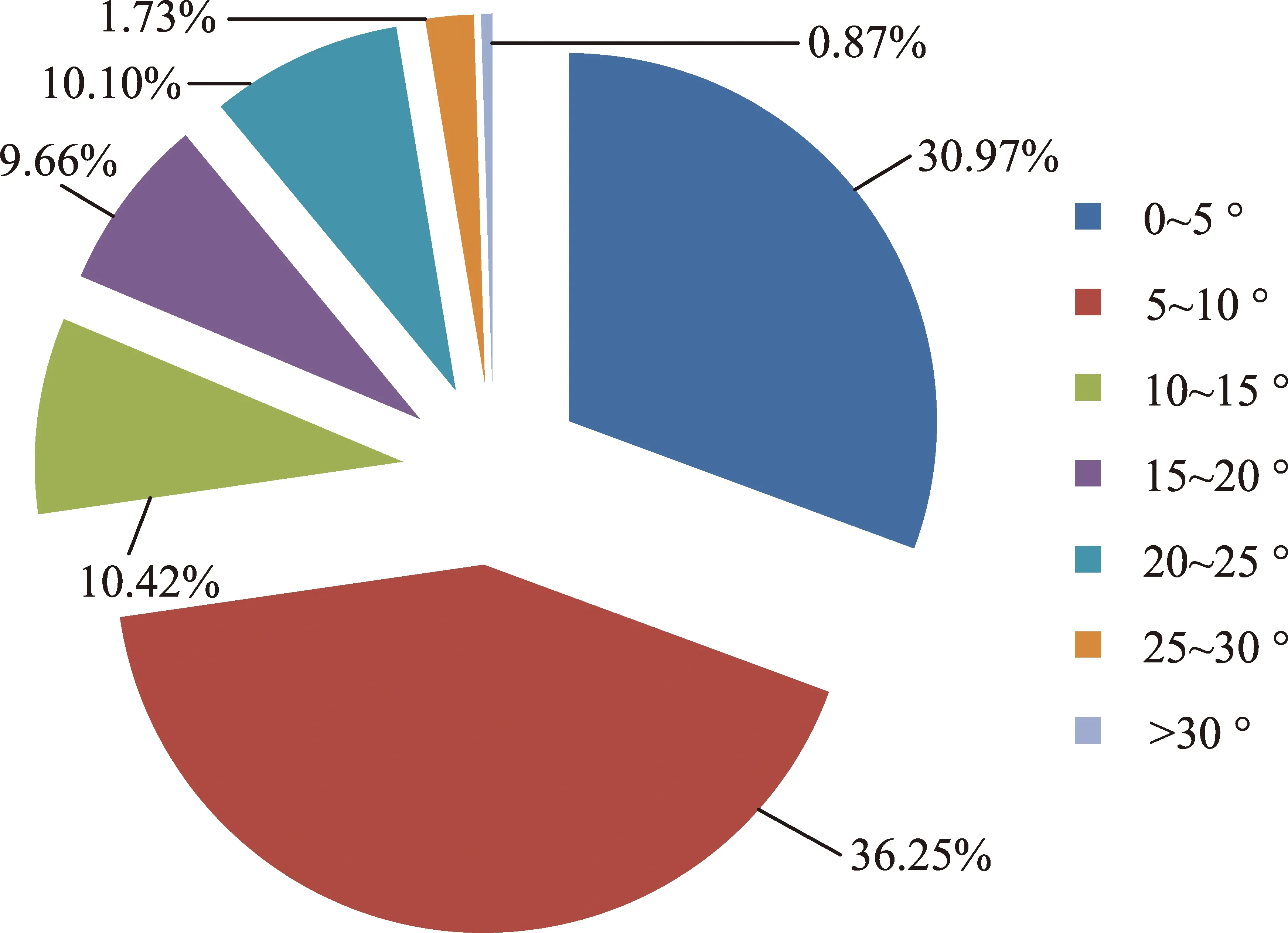
圖3 各合成機動角度出現頻次圖Fig.3 Frequency of maneuvering angular
全部在軌機動任務的機動時間余量及CMGs工況情況如圖4所示。
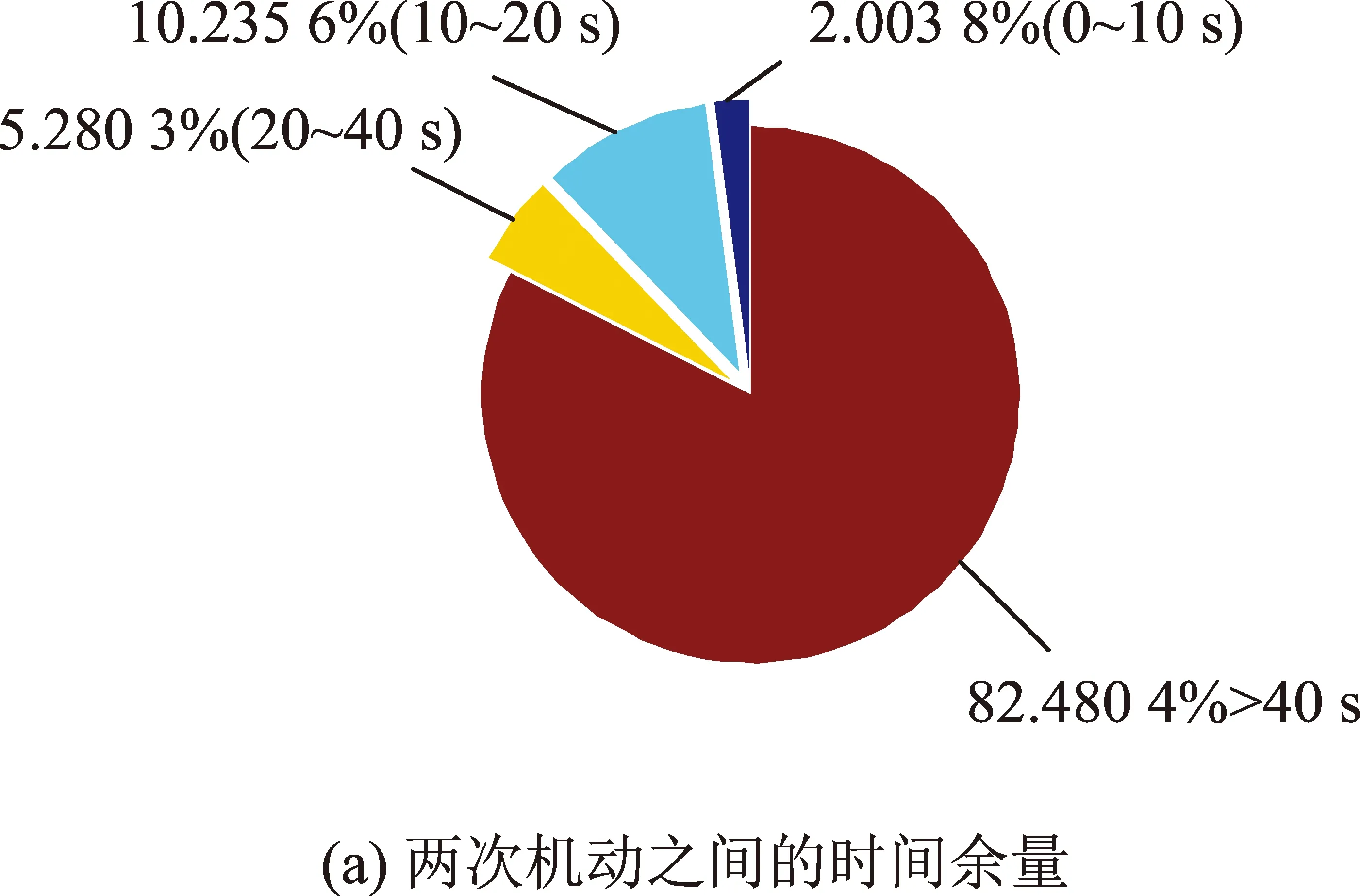
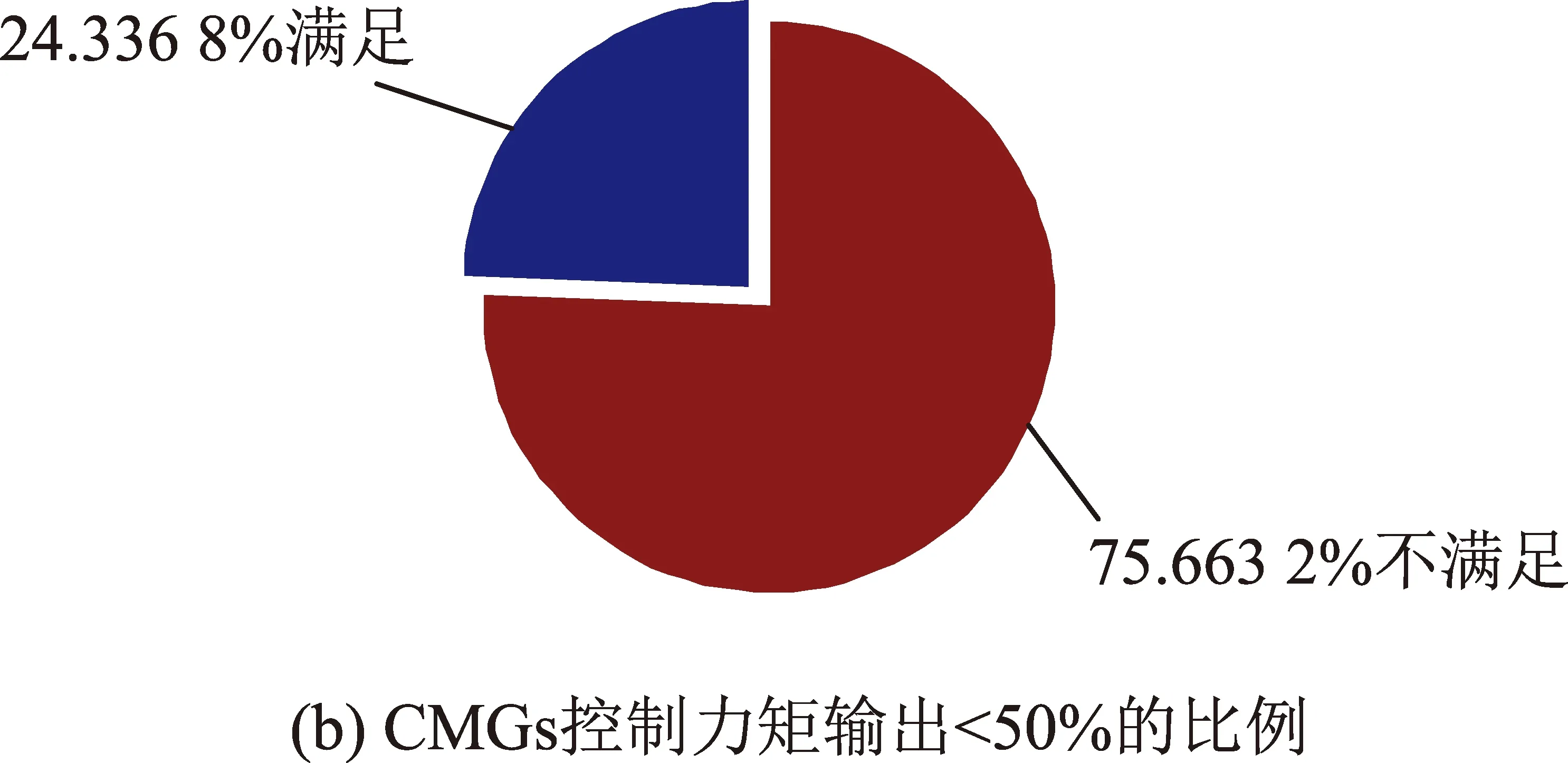
圖4 機動工況及任務時間余量分析Fig.4 Working conditions and time margin under traditional method
由圖4可知,使用當前姿態規劃方法時,超過80%的任務時間余量大,但是僅有24%的任務能夠滿足CMGs理想工況條件。這種方法在軌使用時,會造成了大量任務間隔寬松,卻以CMGs提供較大力矩、產生較大框架機動速率為代價,不利于單機長壽命使用。
3 姿態規劃方法研究

(7)
令
(8)
式中:Δm為mamax的調節因子。
(9)

應用于衛星任務中的方法流程如下:
(1)系統根據當前姿態及衛星最大機動能力能夠預判當前任務的最短機動時間為tmin,通過與當前星時ts進行差值計算,得到最大自主控制時間裕度tpre=ts-tmin,tpre即任務機動的時間裕度(tpre>0)。
4 仿真試驗
使用上述算法對相同任務序列進行仿真,實際飛行任務中,受到能源、敏感器對日或遮擋等實際工程條件的約束,會盡量避免非任務期間衛星長時間保持在機動模式中。考慮到上述約束,并結合仿真任務序列中任務間隔情況,定義自主機動時間裕度閾值tpre_max為10 s。航天器機動軌跡為(0,0)至(9,19),完成本次機動后第二次機動至(-9,-19)。姿態角速度與CMG低速框架的變化如圖5所示。
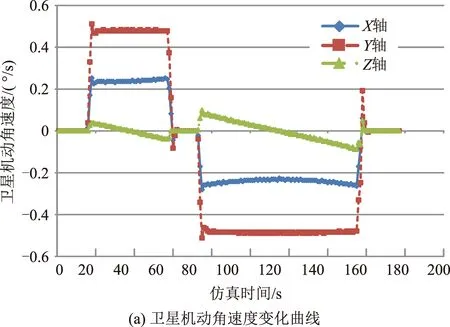
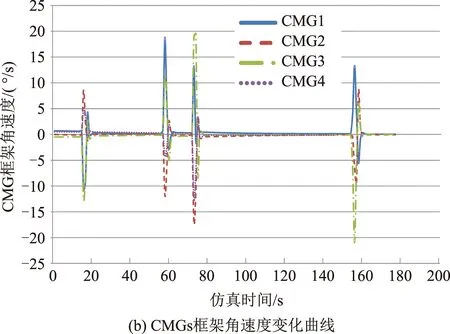
圖5 衛星機動角速度和CMG框架角速度變化Fig.5 Angular velocities of satellite and the gimbal of CMGs
與原有的機動角速度曲線圖2相比較,衛星機動最大角速度從1.0(°)/s降低至0.6(°)/s,且第二次機動過程中CMGs避開了奇異點,機動過程穩定,CMGs框架最大角速度從49(°)/s降低至21(°)/s。前次任務結束至本次任務機動時間間隔為10 s(原任務間隔為30 s),即本次連續機動過程利用了兩次任務間的時間間隔,并通過對可調參數的利用,實現了降低衛星機動角速度、角加速度,降低CMG框架機動速率的目的。
采用上述方法對所有任務序列進行仿真,仿真結果如圖6所示。
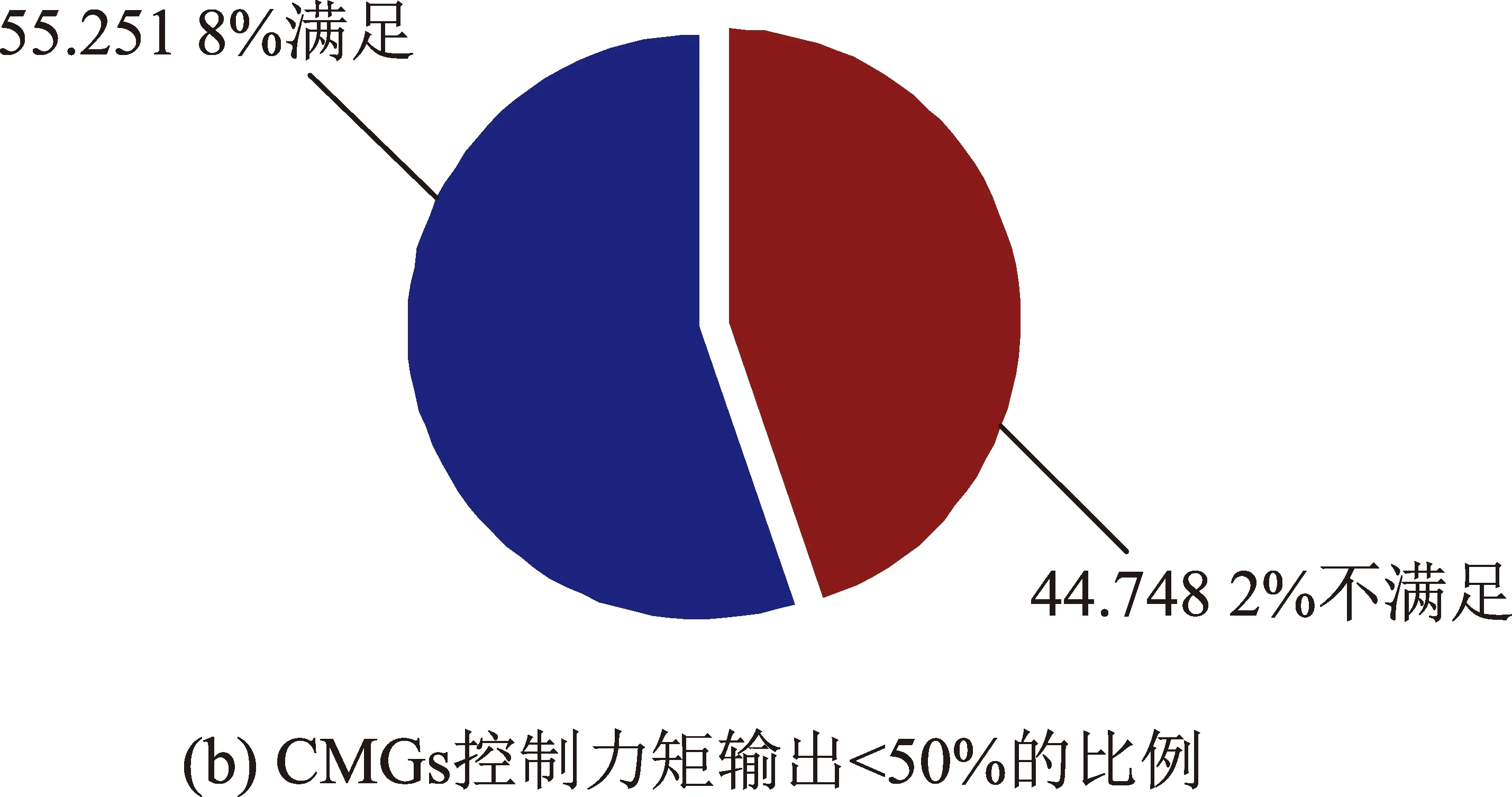
圖6 可自主調節機動能力的任務規劃結果Fig.6 Working conditions and time margin under adaptive control method
由圖6可知,具有時間裕度tpre的任務均適用于本文提出的機動能力自主調節的姿態規劃方法,本文方法有效的利用任務間隔,使55%的任務通過自主調節機動能力,實現了CMGs工作在理想工況下,比使用固定參數規劃方法的情況提升了30%以上。
根據第2節的分析結果,當前在軌遙感衛星任務中,多數任務的時間間隔較長,即存在時間裕度tpre適應本方法的使用。某在研敏捷機動衛星的應用測試中,其地面測試效果與仿真結果一致。機動能力自主調節的姿態規劃方法,利用任務間隔合理降低航天器機動角速度和角加速度,使CMGs控制力矩減小、框架機動速率降低,在不影響衛星業務能力、不影響任務執行的前提下,有利于提高CMG產品在軌使用壽命,且更有益于避開奇異點,保持系統穩定性。
5 結束語
本文以敏捷機動衛星CMGs在軌工況數據為樣本,對CMGs的使用情況進行統計,并提出一種通過可調因子進行機動能力自主調節的姿態規劃模型。在軌數據分析及仿真結果表明:可以使55%的任務通過自主調節機動能力,實現了CMGs工作在理想工況下,比使用固定參數規劃方法的情況提升了30%以上。本文提出的機動能力自主調節的姿態規劃方法,將航天器機動時間作為可調因子,傳遞給姿態規劃控制模型,通過對任務間隔的在軌評估,自主動態調整機動加權系數,降低CMG單機框架機動速率,更有利于單機的長壽命使用,可為其他衛星的CMG在軌使用和姿態規劃調度提供有效的參考。
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41