一種農田灌溉系統的智能發電系統設計與分析
2020-10-17 03:10:44楊媛媛
農機化研究 2020年1期
楊媛媛
(貴州電子信息職業技術學院,貴州 凱里 556000)
0 引言
隨著農田灌溉技術的不斷進步,新型化、智能化的機械設備相應投入其中,不間斷地持續電源供應可保證智能灌溉設備的平穩高效進行。圖1為某農田灌溉系統現場作業場景圖。由圖1可知:大型的灌溉組件在智能發電系統的支持下進行連續均勻灌溉,整體的農田灌溉系統通過供水系統的配合,加之土壤變送器等設施的實施監測,控制各灌溉回路的出水量,最終達到預先設定的土壤濕度目標值,實現自動灌溉。依據當前智能發電的技術原理,對應用于灌溉系統的發電裝置進行了分析。
1 智能發電原理及組成
農田灌溉系統的智能發電系統原理:整體運行機構由機組控制系統向變流器的控制單元、執行動作單元及并網控制單元發出控制信號,經電子回路到達各變壓組件及PMSG組件,進行電力電子變流和變壓,當條件超過閾值范圍,會從PMSG組件反饋至機組控制系統,進行調節發電。
農田灌溉系統的智能發電系統核心組件主要包含PMSG、電機側轉換器、電網側轉換器,以及信息采集與隔離電路等,在各組件的合理連接與布置下構成具有高效輸送功能的智能發電裝置,如表1所示。其中,電網側轉換器主要實現輸出各功率的耦合控制,電機側轉換器主要實現減小發電系統原動機的轉矩消耗,使得智能發電系統在最佳的效率下運作。

表1 農田灌溉系統的智能發電系統核心組件Table 1 Core components of intelligent power generation systems for farmland irrigation systems
2 智能發電系統設計
2.1 數學模型建立
以農田灌溉系統的智能發電結構及原理為基礎,根據圖2所示的發電系統繞組坐標系示意圖,設q與d、α與β坐標下的繞組匝數相同,經數據處理,得出定子電壓方程為
(1)
式中usd—d軸電壓分量;
usq—q軸電壓分量;
isd—d軸電流分量;
isq—q軸電流分量;
Rs—定子電阻;
Ld—定子d軸自感;
Lq—定子q軸自感;
ω—轉子角速度;
ψ—轉子永磁體磁鏈值。
推導出智能發電系統的轉矩與功率關系,即
Te=p[ψisq+(Ld-Lq)isdisq]
(2)
(3)
Pe=Teω
(4)
式中p—發電系統電機的極對數;
Pe—發電系統電機的電磁功率;
PI—發電系統電機的輸入功率;
PO—發電系統電機的輸出功率;
pFe—發電系統電機的鐵損耗;
pm—發電系統電機的機械損耗;
pcus—發電系統電機的銅損耗;
Te—發電系統的電磁轉矩。
同時,該農田灌溉的智能發電系統參數平衡方程為
(5)
式中x′—執行部件位移;
fe′—發電系統電磁力;
p′—聲波壓力;
M—次級質量;
γ—機械阻尼;
k—彈簧勁度系數;
r—發電系統內阻;
R—負載電阻;
X—初級線圈繞組電抗。
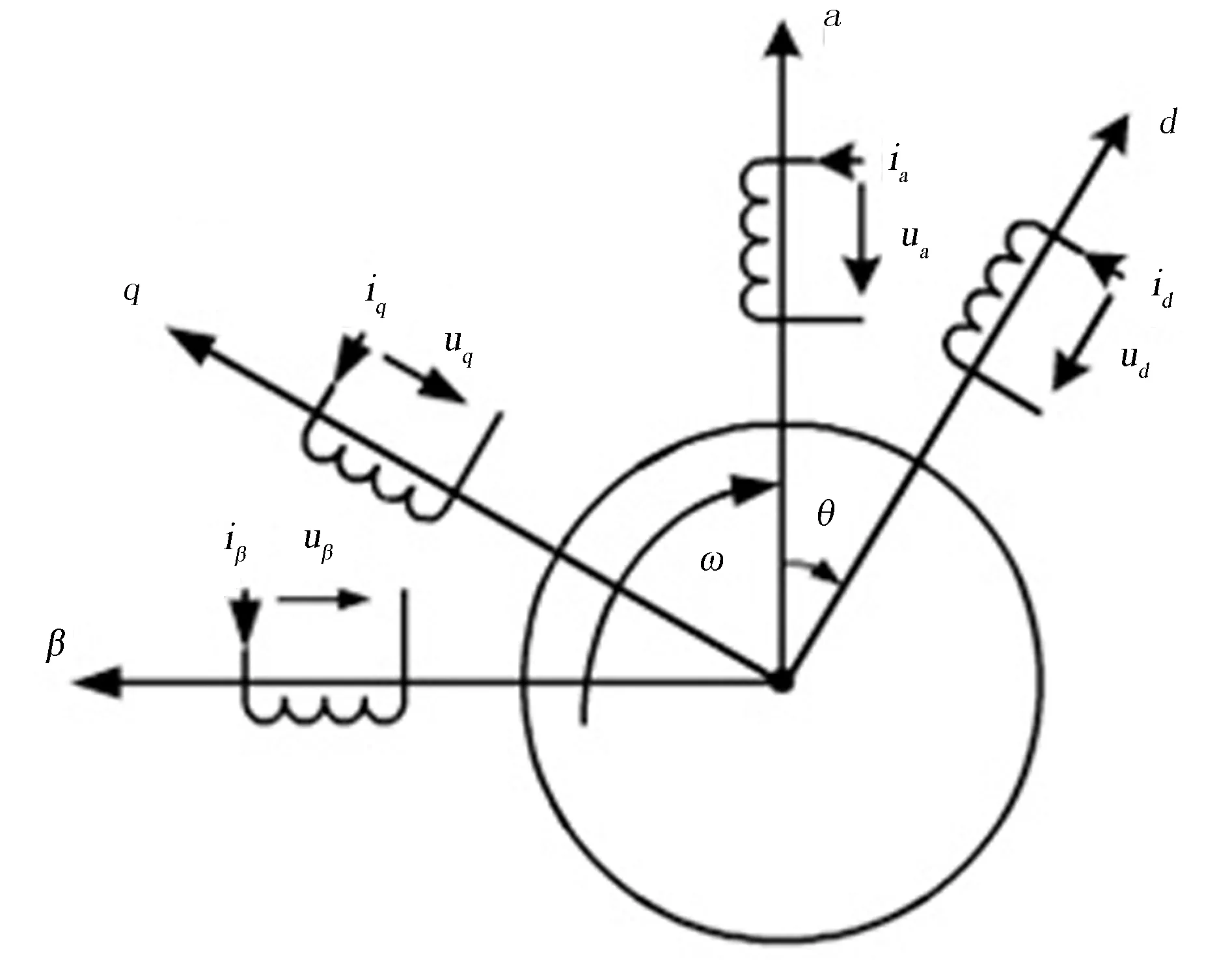
圖2 農田灌溉發電系統繞組坐標系Fig.2 Winding coordinate system with the irrigation power generation system
2.2 系統硬件優化
進行農田灌溉系統的智能發電裝置硬件設計,如圖3所示。將土壤濕度傳感器、pH傳感器及EC濕度傳感器等多種傳感裝置安裝在智能發電系統合理的位置,經多路信號識別處理后到達發電系統的轉換電路,最終輸送到核心處理控制單元;控制中心與計算機控制接口進行高度銜接,完成數據共享。另一方面,核心處理單元融合灌溉發電系統和轉換電路的內容,經處理后分別傳遞給顯示監控單元和關鍵管路的電磁閥控制裝置,各類硬件設置形成良好的通信回路和體系。
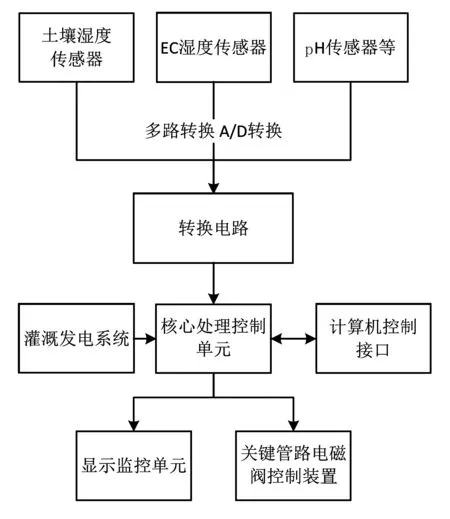
圖3 農田灌溉智能發電系統硬件設計圖Fig.3 Schematic diagram of hardware design of intelligent power generation system for the farmland irrigation
針對智能發電系統的核心裝置進行結構分析,其主要結構形式如圖4所示。設計性能良好的農田灌溉智能發電系統,發電裝置的結構構成尤為重要。當直線發電機工作,推動活塞進行往復運動,此時諧振管、慣性管的內部體積發生變化,從而影響反饋管進行反饋,緩沖罐亦做出相應的動作反應。
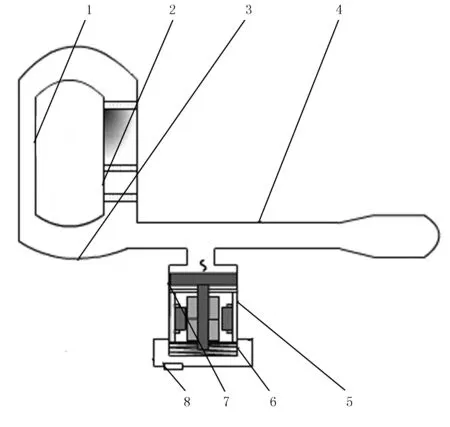
1.反饋管 2.緩沖管 3.慣性管 4.諧振管 5.直線發電機 6.諧振彈簧 7.活塞 8.負載阻抗圖4 農田灌溉系統的發電核心裝置結構簡圖Fig.4 Schematic diagram of the power generation core device of the farmland irrigation system
2.3 系統軟件控制
針對該智能發電系統進行軟件程序設計,采用模塊化控制,根據功能需求的不同,劃分為主程序、中斷服務、子模塊控制及通信程序等。主程序主要負責實現變量和系統初始化的設置、儲存變量,以及針對通用的等待與中斷進行服務等;子模塊控制是實質作業的裝置,將電網側的變換器控制與電機側的變換器控制實現有序配合。當農田給出土壤濕度及pH等測量指標符合要求時,該智能發電系統進行定時自主中斷,實現無人智能化灌溉。此處給出控制程序片段:
#define ADDRESS 0×01
…
sbit tr=P1.6;
void sevice-scrial(void) interrupt 6 using 1
{
uchar rs;
RI=0;
ES=0;
tr=0;
rs=SBUF;
if(rs=0×ff)
{
SM2=1;
ES=1;
return;
}
…
tr=1;
SBUF=ADDRESS;
while(TI=0);
TI=0;
tr=0;
…
}
針對灌溉發電系統的核心程序算法的變量進行規則設置(見表2),依據控制算法分割規則及隸屬函數的要求,選取0.5為算法語言變量E的劃分單元,定義出對應的語音值,分別為正大PL、正小PS、零值ZE、負小NS和負大NL,從而在語言程序的控制下,進行智能發電灌溉動作。
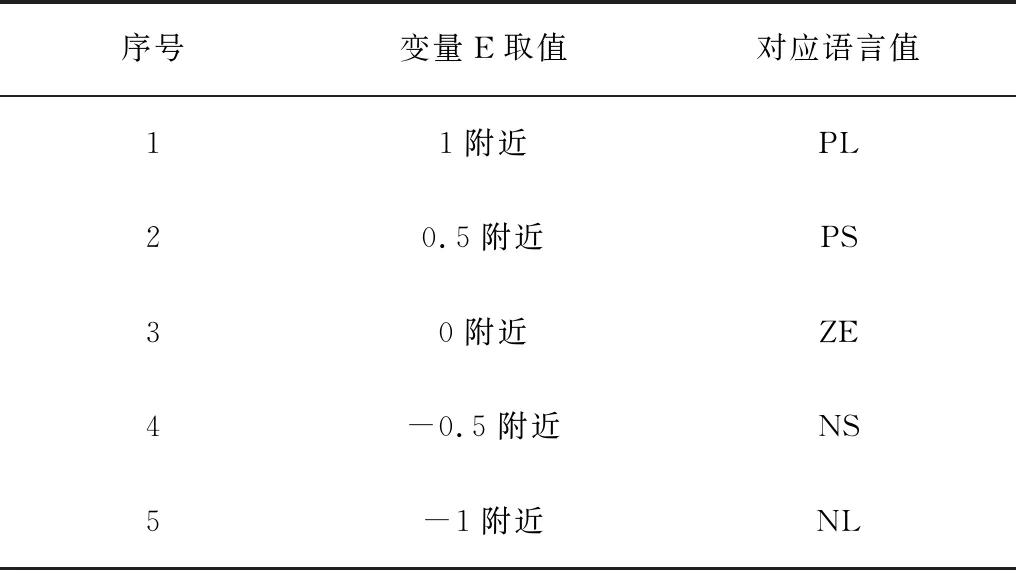
表2 灌溉發電系統核心程序算法變量設置規則表Table 2 Algorithm variable setting rule table of the core procedures for the irrigation power generation system
3 灌溉智能發電試驗
3.1 系統配置
進行農田灌溉系統智能發電設計試驗,首先進行智能發電系統的關鍵參數配置,具體參數值如表3所示。發電裝置本體的參數符合相關要求后,為實現通信的準確迅速,選定物理層通信協議屬性,設置如圖5所示的智能發電系統通信協議執行流程圖,主要針對接收數據的判定、發送及延時等相關動作進行控制。
圖6為此次智能發電試驗的裝置布置示意圖。土壤濕度是進行農田智能灌溉的指示性標志,選取1#、2#兩個地塊,首先通過土壤墑情的實時信息采集,經過網絡控制及GPRS處理控制器進行裝置運行情況的準確把控,智能發電系統的電路暢通與通訊環節保證實現智能發電灌溉的中心控制。
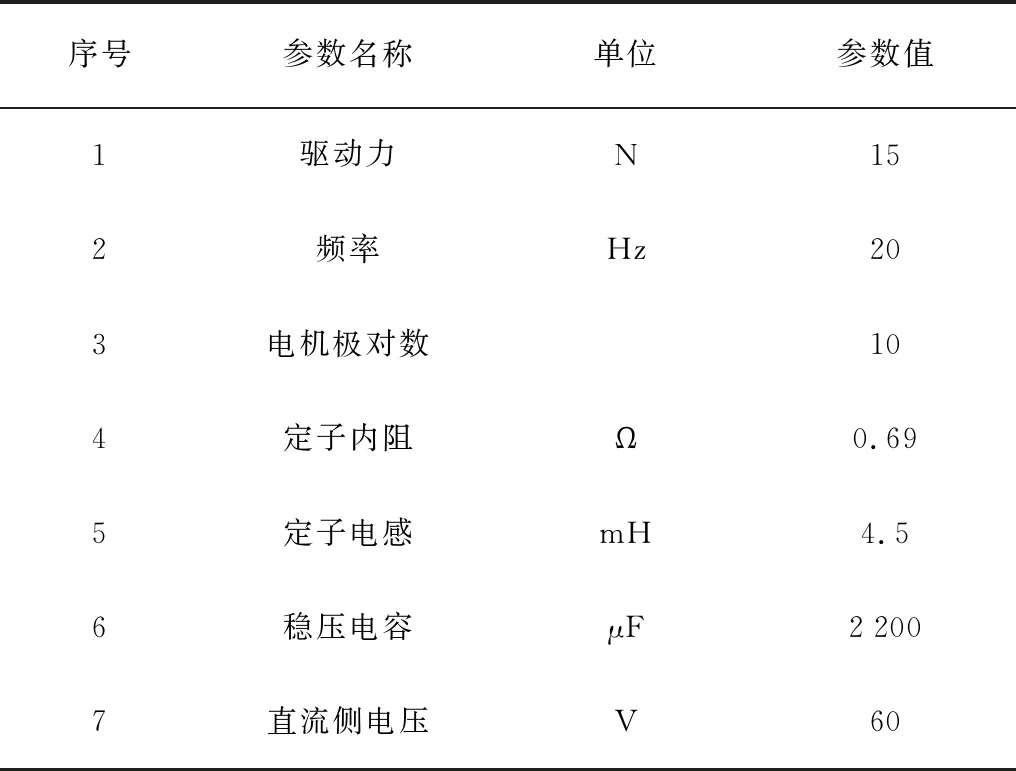
表3 農田灌溉系統的智能發電系統參數配置Table 3 Parameters configuration of intelligent power generation systems for farmland irrigation systems
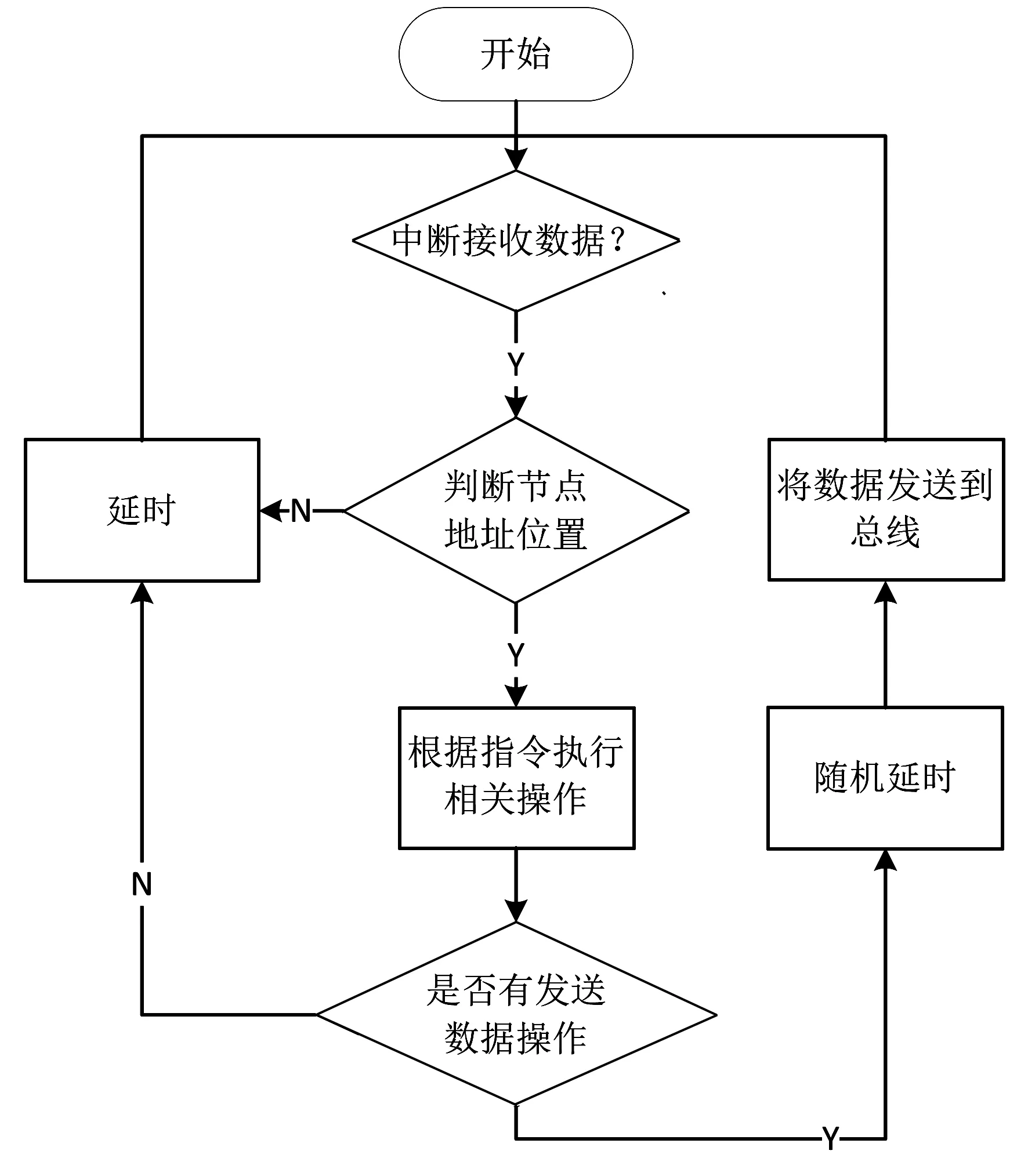
圖5 智能發電系統設計通訊協議執行圖Fig.5 Designed communication protocol execution diagram of the intelligent power generation system
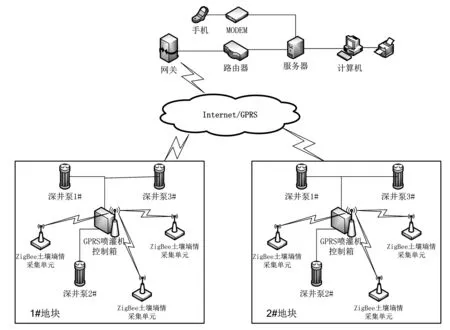
圖6 農田灌溉系統設計試驗裝置布置Fig.6 Experimental device layout for the design on the farmland irrigation system
3.2 過程分析
通過數據處理后,給出圖7 所示的發電裝置關鍵部件處的影響表征對比圖。選取工作部件(水輪機)的動力響應來反饋發電系統的設計效果,對下導軸承和轉輪部位進行參數對比,以位移、頻率f、旋轉角速度Ω及橫振速度(dX3/ dT、dX5/ dT)之間的關系為出發點,得到軸心軌跡、頻譜及龐加萊分布狀態。其中,X3、X5、Y3、Y5分別表示下導軸承和轉輪在X、Y方向上的位移。軸心軌跡圖表明,轉輪處呈現出不規則的狀態,且橫振速度與位移的關系圖呈現出多點,分叉現象明顯。
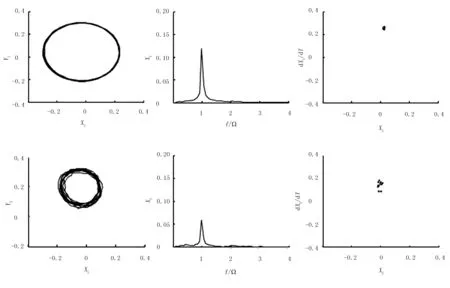
(a) 軸心軌跡圖 (b) 頻譜圖 (c) 龐加萊圖圖7 發電系統中發電裝置關鍵部件處的影響表征對比圖Fig.7 Influence characterization comparison diagram of the key components of power generation device in power generation system
4 結論
1) 通過對農田灌溉技術的研究,在了解農田灌溉智能發電機理的基礎上,建立了智能發電裝置數學模型,對智能發電系統進行硬件裝置設計和軟件控制系統設計,形成較為完善的農田灌溉智能發電系統。
2) 合理布置智能發電裝置各組件,進行農田灌溉智能發電系統的模擬試驗,通過發電裝置關鍵部件處影響特征對比,得到運行中灌溉系統可能會受到沖擊的部位,有利于智能灌溉發電系統的元件選取及搭配。
3) 此灌溉系統智能發電系統的設計可有效促進農田灌溉系統智能改進與開發,對類似發電裝置有一定的參考價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32