基于BS架構(gòu)的收割機(jī)軌跡數(shù)據(jù)可視化分析系統(tǒng)
2020-10-19 02:14:52馬江濤鄭遠(yuǎn)攀
農(nóng)機(jī)化研究 2020年12期
江 楠,馬江濤, 鄭遠(yuǎn)攀
(鄭州輕工業(yè)學(xué)院 計(jì)算機(jī)與通信工程學(xué)院,鄭州 450002)
0 引言
隨著農(nóng)機(jī)自動化技術(shù)的不斷發(fā)展,農(nóng)機(jī)的社會化服務(wù)越來越普遍,但目前對于農(nóng)機(jī)的派出、組織生產(chǎn)、作業(yè)管理和質(zhì)量監(jiān)控缺少有效的管理技術(shù)手段,特別是在農(nóng)忙時(shí)節(jié),由于農(nóng)機(jī)資源的不合理調(diào)度會造成農(nóng)機(jī)的缺口比較大,農(nóng)機(jī)作業(yè)效率低,農(nóng)業(yè)作業(yè)生產(chǎn)需求得不到有效的滿足。
B/S架構(gòu)即瀏覽器和服務(wù)器架構(gòu)模式,是隨著Internet技術(shù)的興起對C/S架構(gòu)的一種變化或者改進(jìn)的架構(gòu)。在這種架構(gòu)下,用戶工作界面通過瀏覽器來實(shí)現(xiàn)。B/S架構(gòu)是Web興起后的一種網(wǎng)絡(luò)架構(gòu)模式,Web瀏覽器是客戶端最主要的應(yīng)用軟件。這種模式統(tǒng)一了客戶端,將系統(tǒng)功能實(shí)現(xiàn)的核心部分集中到服務(wù)器上,簡化了系統(tǒng)的開發(fā)、維護(hù)和使用。將B/S架構(gòu)應(yīng)用到農(nóng)機(jī)的遠(yuǎn)程調(diào)度系統(tǒng)上,可以提高調(diào)度系統(tǒng)的可查詢和可視化水平,實(shí)現(xiàn)農(nóng)機(jī)作業(yè)軌跡的實(shí)時(shí)動態(tài)顯示,對于提高調(diào)度系統(tǒng)的管理效率和水平具有重要的意義。
1 收割機(jī)軌跡數(shù)據(jù)分析系統(tǒng)
收割機(jī)軌跡數(shù)據(jù)分析系統(tǒng)主要是根據(jù)農(nóng)機(jī)作業(yè)的實(shí)時(shí)動態(tài)情況,通過傳感器收集農(nóng)機(jī)動態(tài)作業(yè)信息,再將數(shù)據(jù)返回到遠(yuǎn)程數(shù)據(jù)庫系統(tǒng);利用數(shù)據(jù)分析服務(wù)器和應(yīng)用服務(wù)器對數(shù)據(jù)進(jìn)行可視化分析后,將農(nóng)機(jī)的行駛軌跡可視化地呈現(xiàn)給農(nóng)機(jī)管理人員和駕駛操作人員。為了提高軌跡數(shù)據(jù)分析系統(tǒng)的可查詢功能和可視化功能,采用MySQL數(shù)據(jù)庫和Web技術(shù)對系統(tǒng)進(jìn)行改進(jìn)。Web技術(shù)對MySQL數(shù)據(jù)庫進(jìn)行訪問需要數(shù)據(jù)交互的基本框架,而采用Browser/Server(簡稱B/S)結(jié)構(gòu)可以實(shí)現(xiàn)應(yīng)用服務(wù)器訪問數(shù)據(jù)服務(wù)器的功能,其基本結(jié)構(gòu)框架如圖1所示。
在B/S 結(jié)構(gòu)的架構(gòu)下,進(jìn)行收割機(jī)數(shù)據(jù)可視化分析后,用戶可以方便地采用Web瀏覽器進(jìn)行瀏覽,并獲取網(wǎng)頁的信息。收割機(jī)作業(yè)時(shí),可以將作業(yè)行駛軌跡數(shù)據(jù)實(shí)時(shí)返回給遠(yuǎn)程數(shù)據(jù)分析系統(tǒng);數(shù)據(jù)分析系統(tǒng)通過可視化處理形成軌跡,并呈現(xiàn)在瀏覽器頁面上;農(nóng)機(jī)管理人員根據(jù)作業(yè)情況對收割機(jī)做出合理的調(diào)度和安排,規(guī)劃其行駛路徑,提高作業(yè)效率。當(dāng)作業(yè)的農(nóng)機(jī)較多時(shí),管理人員還可以根據(jù)每一臺收割機(jī)的作業(yè)情況,對其后期作業(yè)做出合理的分配,從而提高收割機(jī)的作業(yè)效率。
2 收割機(jī)軌跡跟蹤
以韭菜收獲機(jī)為例,割刀電機(jī)是韭菜收割機(jī)的關(guān)鍵所在,因此選擇合適的割刀電機(jī)尤為重要。筆者通過實(shí)驗(yàn)計(jì)算韭菜被割斷時(shí)的切割力,選擇比較合適的割刀電機(jī)。
實(shí)驗(yàn)主要是利用特制的夾具固定20根韭菜,然后用割刀割斷,同時(shí)記下韭菜被割斷時(shí)候割刀所收到的力。選取6組韭菜進(jìn)行割斷實(shí)驗(yàn),然后測量6組隔斷力并計(jì)算平均值。割刀受力實(shí)驗(yàn)數(shù)據(jù)如表1所示。
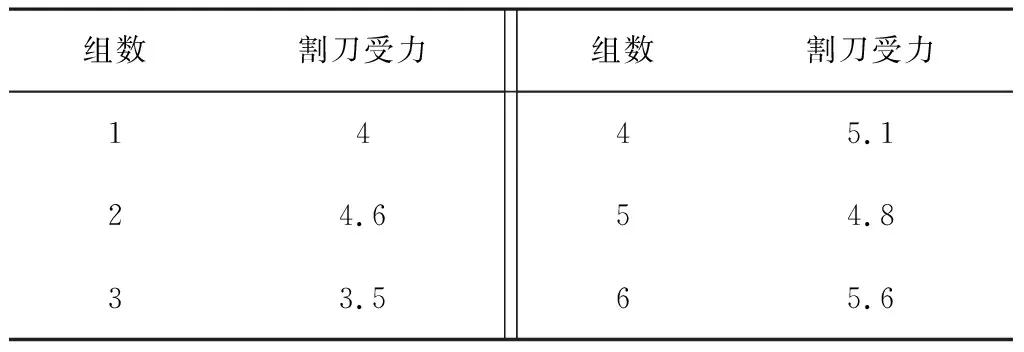
表1 割刀受力實(shí)驗(yàn)數(shù)據(jù)Table 1 The experimental data of cutting force N
根據(jù)表1,計(jì)算出20根韭菜被隔斷時(shí)割刀受到的力為4.6N。因此,割刀電機(jī)需要輸出的扭矩T為
T=F×r=0.46(N·m)
(1)
韭菜收割機(jī)的割刀在作業(yè)過程中,某一時(shí)間點(diǎn)相對于被切割的韭菜做余擺線運(yùn)動,那么刀片根部即與韭菜接觸的地方為最低速度,即
(2)
當(dāng)ωt+γ=(2k+1)π(k=0,1,2,…,n)時(shí),刀片某一點(diǎn)的速度va為
va=vamin=rω-vb
(3)
其中,vamin為刀片某一點(diǎn)最小速度,r為刀片半徑,vb為刀具前進(jìn)速度。
使用割刀切割韭菜時(shí),速度較小,會破壞韭菜根部,給果農(nóng)造成損失,則確定割刀的最合適的速度非常重要。根據(jù)文獻(xiàn)查詢和實(shí)驗(yàn)得出:割刀速度為12~32m/s時(shí)對韭菜根據(jù)傷害最小,因此設(shè)計(jì)取vb=0.7m/s。
結(jié)合前文介紹,可以計(jì)算出刀片根部的轉(zhuǎn)速計(jì)算公式為
(4)
割刀的半徑為10cm,將其帶入公式可以計(jì)算出割刀轉(zhuǎn)速為1800~8500r/min。本文選擇57BL75S10-280TF9高速直流無刷電機(jī),電機(jī)采用節(jié)能環(huán)保領(lǐng)域的驕子-釹鐵磁硼鋼,保證設(shè)備的良好性能。電機(jī)電壓24V,功率100W,轉(zhuǎn)速最高8000r/min,額定扭矩0.12N·m。具體參數(shù)如表2所示。
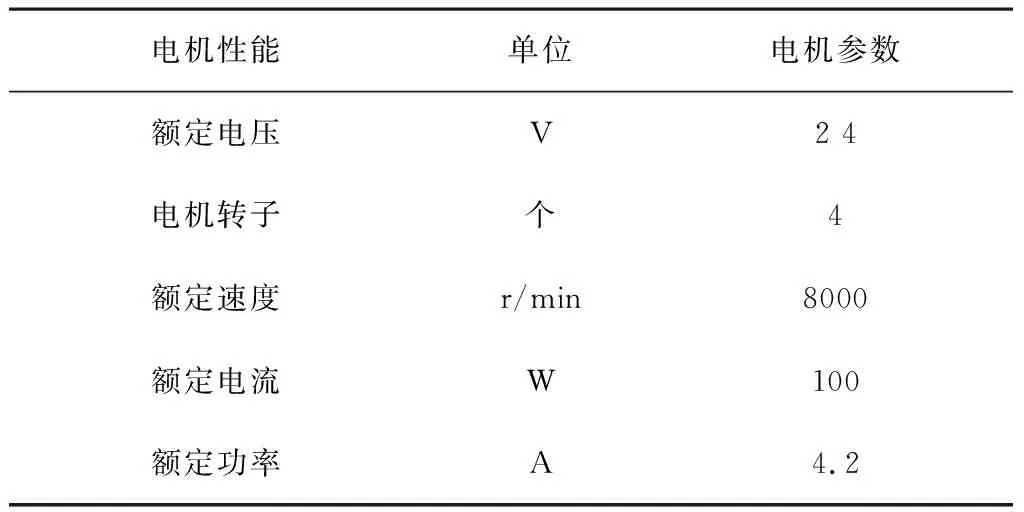
表2 韭菜收割機(jī)割刀電機(jī)參數(shù)Tab le 2 The electric parameters of cutting knife of leek harvester
為了實(shí)現(xiàn)收割機(jī)軌跡數(shù)據(jù)的可視化,需要對收割機(jī)的移動數(shù)據(jù)進(jìn)行實(shí)時(shí)采集,捕捉動態(tài)運(yùn)動目標(biāo)。與靜止目標(biāo)圖像的捕捉不同,動態(tài)目標(biāo)的捕捉需要使用圖像逼近的方法,捕捉過程需要對實(shí)時(shí)圖像的各幀進(jìn)行掃描。假設(shè)運(yùn)動圖像的第k和k-1幀圖像的灰度值分別為fk(x,y)、fk-1(x,y),Dk(x,y)表示差分運(yùn)算結(jié)果,其表達(dá)式為

(5)
采用圖像幀間差分算法可以對運(yùn)動的收割機(jī)目標(biāo)圖像進(jìn)行捕捉,但在處理時(shí)會發(fā)生空洞現(xiàn)象。因此,在對目標(biāo)進(jìn)行識別時(shí),可以采用外接矩形的方法,在收割機(jī)目標(biāo)周圍建立一個(gè)外接矩形,將處理圖像和第1幀圖像相減,得到完整的收割機(jī)目標(biāo)區(qū)域。為了提高目標(biāo)捕捉的精度,在進(jìn)行圖像處理之前可以對圖像進(jìn)行去噪聲處理,處理過程可以采用迭代計(jì)算的方法,流程如圖2所示。
如果同時(shí)滿足以上3個(gè)條件,則稱Bk、Ck、Ek、Fk、Dk為圖像M的二次多分裂。
幀間差分分裂迭代模糊聚類過程如圖3所示。圖3中:在去除噪聲時(shí),由于分裂迭代計(jì)算會產(chǎn)生較多數(shù)量的圖像,因此引入模糊分類方法對圖像進(jìn)一步處理,從而獲取更加準(zhǔn)確的收割機(jī)運(yùn)行軌跡。在進(jìn)行模糊分類時(shí),其隸屬度函數(shù)為
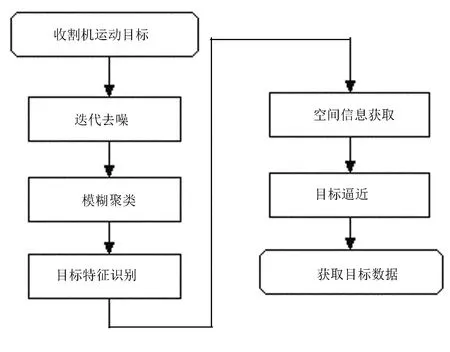
圖3 幀間差分分裂迭代模糊聚類過程Fig.3 The splitting iterative fuzzy clustering process of interframe difference
(6)
其中,mi為聚類中心;a、b為計(jì)算參數(shù),其數(shù)值一般是正數(shù);μ(x)表示隸屬度函數(shù),λ(x)表示非隸屬度函數(shù);π(x)表示直覺指數(shù)π(x)。三者的關(guān)系式為
μ(x)+λ(x)+π(x)=1
(7)
聚類K-means算法是一種智能化程度較高的算法,利用關(guān)聯(lián)規(guī)則進(jìn)行數(shù)據(jù)挖掘和分析。在進(jìn)行分類時(shí),首先統(tǒng)計(jì)含有一個(gè)元素項(xiàng)集出現(xiàn)的頻率決定一維項(xiàng)目集;然后統(tǒng)計(jì)項(xiàng)目集的支持度。表3為一個(gè)簡單的數(shù)據(jù)記錄表。

表3 數(shù)據(jù)記錄表Table 3 Data Record Table
在關(guān)聯(lián)算法中,需要創(chuàng)建每個(gè)數(shù)據(jù)記錄候選集的支持度,再通過數(shù)據(jù)之間的關(guān)聯(lián)性對數(shù)據(jù)進(jìn)行分類。其步驟如下:

(8)
其中,Nj為第j個(gè)聚類域Sj中所包含的樣本個(gè)數(shù)。求出均值向量后,將其作為聚類中心,計(jì)算均值,其函數(shù)規(guī)則為
(9)
最后,對每個(gè)聚類的數(shù)據(jù)進(jìn)行均值核算。

通過模糊聚類后,圖像運(yùn)動后的位置將被確定,利用可視化技術(shù)便可以繪制出農(nóng)機(jī)的軌跡。為了實(shí)現(xiàn)農(nóng)機(jī)軌跡的可視化顯示,搭建了基于B/S架構(gòu)的可視化平臺。其開發(fā)主要采用ASP.NET開發(fā)環(huán)境,編程語言采用C語言,可視化顯示的數(shù)據(jù)庫采用SQL數(shù)據(jù)庫。這樣,在收割機(jī)作業(yè)過程中遠(yuǎn)程端可以實(shí)時(shí)顯示作業(yè)動態(tài)軌跡。
采用平移傾斜裝置,在垂直平面中上下旋轉(zhuǎn)工業(yè)相機(jī)獲取同一行但不同距離的農(nóng)作物位置。作物行和聯(lián)合收割機(jī)間距離示意如圖4所示。
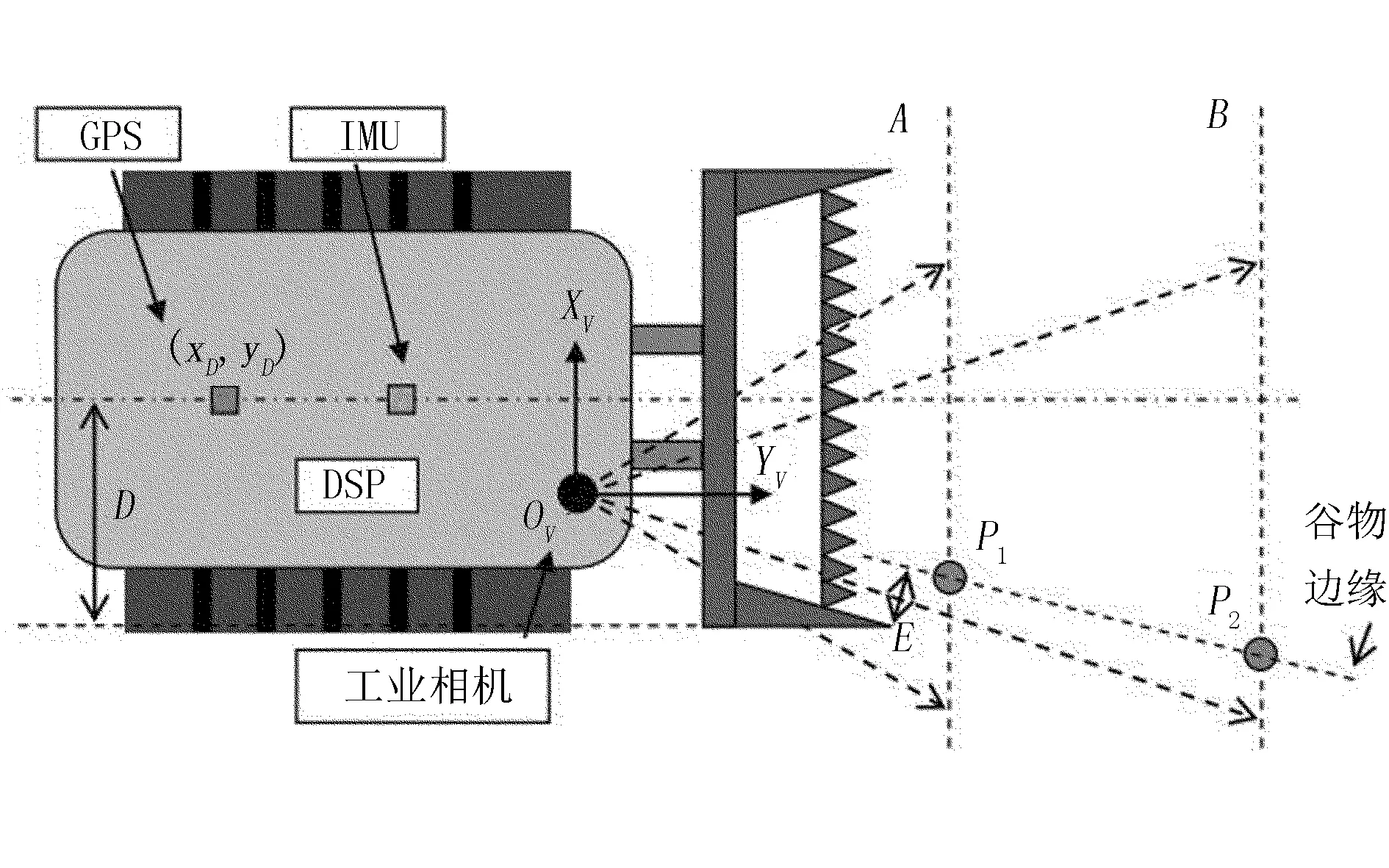
圖4 作物行和聯(lián)合收割機(jī)間距離示意圖Fig.4 Diagram of the distance between crop rows and combines
圖4中,GPS用于收割機(jī)的自身實(shí)時(shí)定位;IMU為慣性測量裝置;P1處的農(nóng)作物通過工業(yè)相機(jī)以48°的傾斜角拍攝得到;P2是在傾斜角度為69°時(shí)檢測到的另一作物的位置。P1、P2間的直線可以認(rèn)定為分離切割與未切割區(qū)域的作物行,其在笛卡爾坐標(biāo)系下的表達(dá)式為
ax+by+c=0
(10)
其中,a、b、c為直線系數(shù)值。
將橫向偏移ε和偏轉(zhuǎn)角δ作為兩個(gè)參數(shù)來確定轉(zhuǎn)向角φ,表達(dá)式為
φ=A1ε+A2δ
(11)
ASP.NET是一種動態(tài)的Web技術(shù),利用該技術(shù)用戶可以更加快速地開發(fā)Web應(yīng)用程序。該技術(shù)支持各種類型的瀏覽器,結(jié)合Web站點(diǎn)和Web服務(wù)技術(shù),遠(yuǎn)程端只需要在瀏覽器界面操作便可以查看收割機(jī)的作業(yè)軌跡。編程主要采用了C#編程語言,較為簡單,可以與.NET框架完美結(jié)合。數(shù)據(jù)庫采用了SQL數(shù)據(jù)庫,具有強(qiáng)大的數(shù)據(jù)庫創(chuàng)建、開發(fā)、設(shè)計(jì)和管理功能,且具有較好的可擴(kuò)展性。搭建好可視化平臺后,對采集得到的收割機(jī)運(yùn)動目標(biāo)數(shù)據(jù)進(jìn)行處理,如圖5所示。
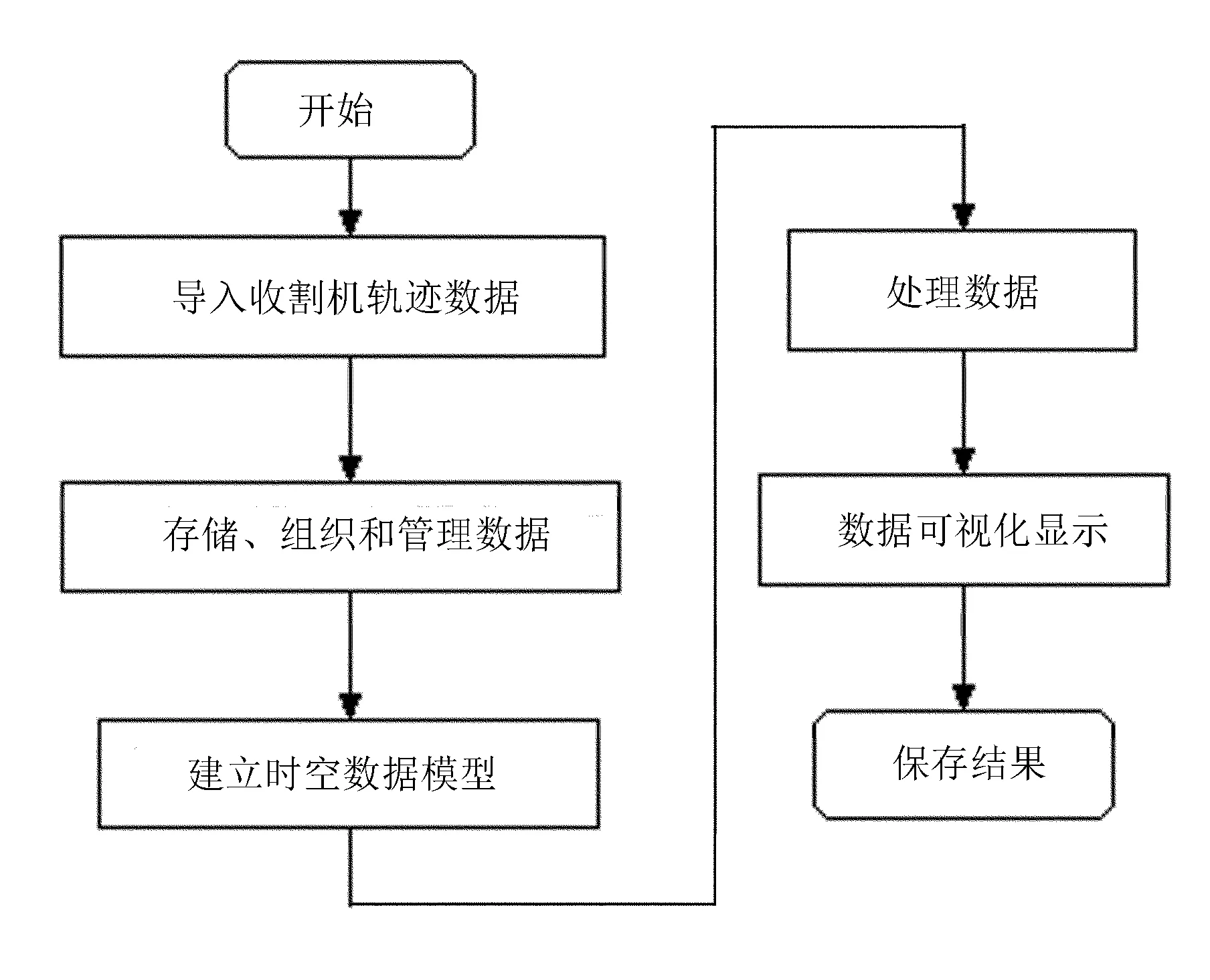
圖5 軌跡可視化顯示過程Fig.5 The visual display process of trajectory
基于B/S架構(gòu)的可視化顯示平臺,采用C#語言編程和SQL數(shù)據(jù)庫技術(shù),可以對之前采集和去噪的收割機(jī)運(yùn)動數(shù)據(jù)進(jìn)行處理,然后在遠(yuǎn)程端對收割機(jī)的運(yùn)行軌跡進(jìn)行可視化顯示。除此之外,還可以對軌跡數(shù)據(jù)進(jìn)行保存,以便后期對歷史數(shù)據(jù)進(jìn)行查詢。
3 收割機(jī)軌跡數(shù)據(jù)可視化分析系統(tǒng)設(shè)計(jì)
農(nóng)業(yè)收割機(jī)軌跡的數(shù)字化顯示可以為調(diào)度系統(tǒng)提供可靠的數(shù)據(jù)支持,根據(jù)農(nóng)機(jī)作業(yè)的實(shí)時(shí)軌跡顯示農(nóng)機(jī)管理人員可以對農(nóng)機(jī)進(jìn)行合理的調(diào)度,通過最短路徑規(guī)劃、多收割機(jī)系統(tǒng)作業(yè)等方式 提高收割機(jī)的作業(yè)效率。
收割機(jī)可視化管理用戶注冊成功后,將收割機(jī)信息存入數(shù)據(jù)庫,其實(shí)現(xiàn)采用java編碼實(shí)現(xiàn),核心程序如下:
//創(chuàng)建收割機(jī)可視化管理員用戶相關(guān)實(shí)體
farm machinery fmzh = new farm machineryZh();
farm machineryJb fmjb = new farm machineryJb();
farm machineryLx fmlx = new farm machineryLx();
//將學(xué)員信息存入對應(yīng)實(shí)體
fmzh.setname(a);
fmzh.setPassword(b);
fmjb.setfmSf(xysf);
fmjb.setFdWay(Qualification);
fmjb.setPosition(Position_b);
fmlx.setPhone(request.getParameter("Tel"));
//通過調(diào)用manage方法將數(shù)據(jù)存入數(shù)據(jù)庫
farm machineryManage.savefmLx(fmlx)
farm machineryManage.savefmLx(fmjb)
farm machineryManage.savefmLx(fmzh)
注冊完成后,便可以進(jìn)行登錄操作。采用前端JSP的Lgin.jsp來實(shí)現(xiàn)登錄功能,在LoginAction類中判斷用戶是否可以正常登錄系統(tǒng)。功能的實(shí)現(xiàn)采用Java語言編寫,流程如圖6所示。
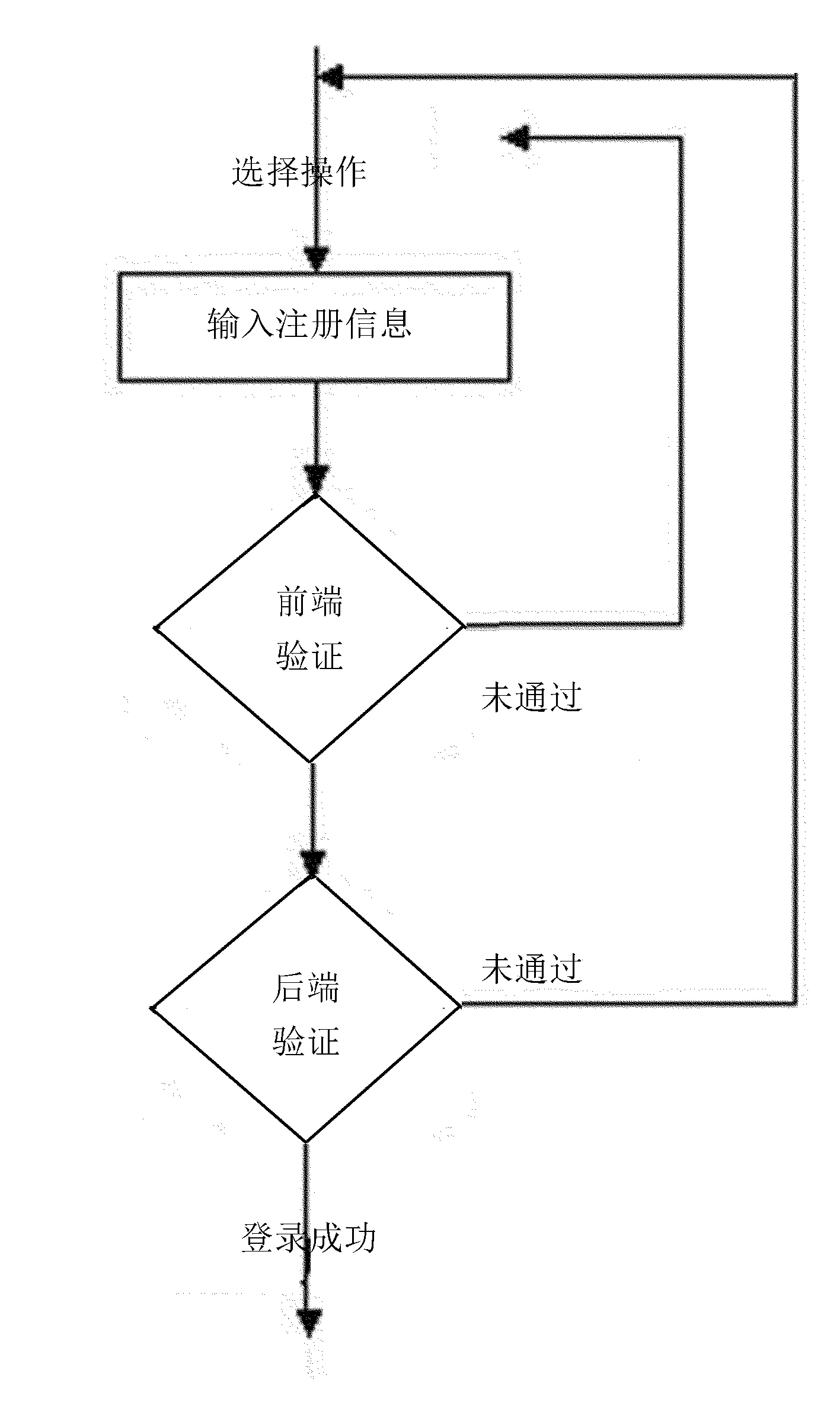
圖6 收割機(jī)可視化管理員登錄流程Fig.6 Log-in process of agricultural mechanic
驗(yàn)證收割機(jī)可視化管理員登錄用戶的賬號是否合法核心代碼如下:
//獲取收割機(jī)可視化系統(tǒng)管理員用戶名和密碼
String username = request.getParameter("name");
String password = request.getParameter("password ");
//調(diào)用manage判斷用戶名和密碼是否合法
Boolean flag1=checkUserManage.ckuserZh (name,password);
//如果登錄成功則進(jìn)入相關(guān)系統(tǒng),如果不成功則
if(flag1&&flag2){
return new ModelAndView(this.getViewPage());
}
else
{
return new ModelAndView(this.getLoginPage());
}
通過Java語言,可以開發(fā)出收割機(jī)可視化管理的各個(gè)模塊的登錄及錄入信息和管理頁面等功能;再結(jié)合Web服務(wù)器平臺,可以架構(gòu)整個(gè)收割機(jī)軌跡數(shù)據(jù)可視化分析系統(tǒng)。
圖7為雷沃重工收割機(jī)聯(lián)合作業(yè)是的作業(yè)情景。收割機(jī)聯(lián)合作業(yè)時(shí),為了提高收割機(jī)的協(xié)同化作業(yè)效率,需要對收割機(jī)進(jìn)行合理的調(diào)度,并對收割作業(yè)的路徑進(jìn)行規(guī)劃。
完整的收割機(jī)調(diào)度系統(tǒng)主要由調(diào)度系統(tǒng)、調(diào)度臺、基于B/S框架的可視化系統(tǒng)、GPS、手持終端和通信網(wǎng)絡(luò)組成,可以實(shí)現(xiàn)定位、軌跡數(shù)據(jù)顯示及農(nóng)機(jī)調(diào)度等多種業(yè)務(wù),如圖8所示。為了實(shí)現(xiàn)收割機(jī)數(shù)據(jù)的可視化顯示,需要對數(shù)據(jù)管理系統(tǒng)進(jìn)行設(shè)計(jì)。考慮使用的用戶較多,數(shù)據(jù)傳輸量和占用的數(shù)據(jù)量較大,為了保證24h不間斷的服務(wù),設(shè)計(jì)了硬件配置架構(gòu)。
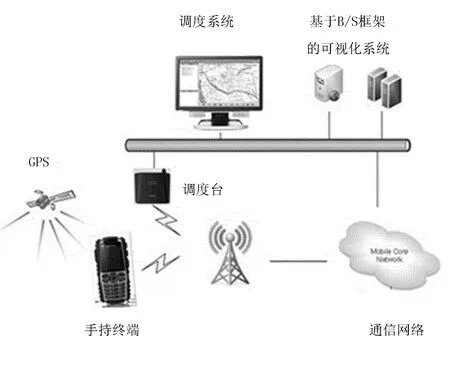
圖8 收割機(jī)調(diào)度系統(tǒng)框架圖Fig.8 The framework diagram of harvester dispatching system
軌跡數(shù)據(jù)分析系統(tǒng)主要由可視化數(shù)據(jù)庫服務(wù)器和應(yīng)用服務(wù)器組成,如圖9所示。可視化數(shù)據(jù)庫服務(wù)器主要采用MySQL數(shù)據(jù)庫來承擔(dān)所有子模塊的數(shù)據(jù)應(yīng)用,內(nèi)存采用16GB×8,硬盤采用1T×8,應(yīng)用服務(wù)器采用8GB×4,硬盤采用512GB×2,操作系統(tǒng)主要采用64位Windows操作系統(tǒng)。通過軌跡可視化分析,得到了如圖10所示的軌跡顯示圖像。
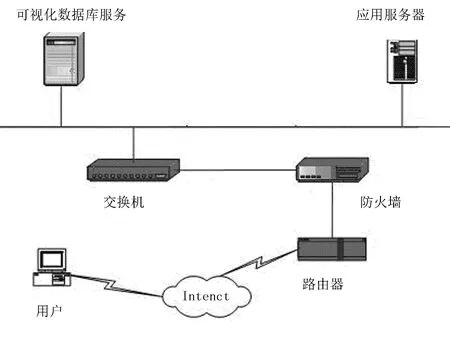
圖9 收割機(jī)軌跡數(shù)據(jù)可視化分析系統(tǒng)Fig.9 The visual analysis system of harvester trajectory datas
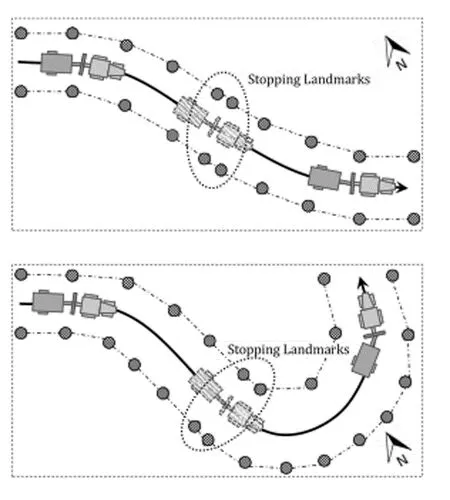
圖10 收割機(jī)運(yùn)行軌跡實(shí)時(shí)顯示圖像Fig.10 The real-time display image of harvester trajectory
通過軌跡數(shù)據(jù)可視化顯示后,得到了收割機(jī)的實(shí)時(shí)運(yùn)行軌跡。在進(jìn)行大面積作業(yè)時(shí),遠(yuǎn)程調(diào)度系統(tǒng)可以對收割機(jī)的行走路徑做出合理的安排,以提高收割機(jī)作業(yè)的效率。在進(jìn)行協(xié)同作業(yè)時(shí),農(nóng)機(jī)管理人員可以根據(jù)作業(yè)區(qū)域的面積和主要特征,對收割機(jī)做出合理的安排;另外,還可以提高農(nóng)機(jī)作業(yè)的安全性,特別是一些急轉(zhuǎn)彎或者存在障礙物較多的作業(yè)區(qū)塊,遠(yuǎn)程調(diào)度系統(tǒng)可以對農(nóng)機(jī)發(fā)出警報(bào),避免作業(yè)事故的發(fā)生。
4 結(jié)論
為了提高農(nóng)機(jī)調(diào)度系統(tǒng)的可視化水平,將B/S架構(gòu)和軌跡動態(tài)顯示技術(shù)引入到了調(diào)度系統(tǒng)的設(shè)計(jì)中。通過對動態(tài)軌跡數(shù)據(jù)的可視化顯示,農(nóng)機(jī)管理人員可以對農(nóng)機(jī)的行駛路徑做出合理的規(guī)劃,在多農(nóng)機(jī)作業(yè)時(shí)可以有效提高農(nóng)機(jī)的作業(yè)調(diào)度分配效率。為了驗(yàn)證方法的可行性,搭建了收割機(jī)行駛軌跡的實(shí)時(shí)數(shù)據(jù)分析系統(tǒng)平臺,并對系統(tǒng)進(jìn)行了測試。結(jié)果表明:采用該方案可以成功地顯示農(nóng)機(jī)的作業(yè)動態(tài)軌跡,對于提高農(nóng)機(jī)的自動化作業(yè)質(zhì)量和作業(yè)水平具有重要的意義。
猜你喜歡
北京測繪(2022年6期)2022-08-01 09:19:06
師道·教研(2022年1期)2022-03-12 05:46:47
云南化工(2021年8期)2021-12-21 06:37:54
新作文·小學(xué)低年級版(2021年9期)2021-11-27 07:57:46
北京測繪(2021年7期)2021-07-28 07:01:18
學(xué)生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
海洋信息技術(shù)與應(yīng)用(2020年1期)2020-06-11 12:43:56
傳媒評論(2019年4期)2019-07-13 05:49:14
故事大王(2016年7期)2016-09-22 17:30:08