機載雷達數(shù)據(jù)融合效能評估
2020-10-20 13:27:50陳福年
艦船電子對抗 2020年4期
關(guān)鍵詞:融合
陳福年
(中國電子科技集團公司第三十八研究所,安徽 合肥 230088)
0 引 言
隨著現(xiàn)代機載雷達的發(fā)展,機載雷達裝備越來越豐富,功能也更全面。但是受到飛機運動平臺的限制,機載雷達的定位精度較差,在現(xiàn)有的雷達裝備下,僅僅依靠單個機載雷達無法實現(xiàn)對目標的高精度探測。為了提高機載雷達的探測精度,充分利用機載雷達的運動平臺優(yōu)勢,本文介紹了運動平臺下的數(shù)據(jù)融合方法,并對融合精度提出了評估方法。
機載雷達由于其運動靈活的優(yōu)勢,被廣泛用于各種戰(zhàn)場,能夠快速偵察戰(zhàn)場中的各個角落。但是由于機載雷達受限于載機平臺,一方面是由于雷達功率和雷達孔徑尺寸都受限,另一方面是由于目前國內(nèi)慣性導航技術(shù)瓶頸,使得機載雷達的探測精度受限。文中采用雙機協(xié)同探測進行數(shù)據(jù)融合,可以極大地提高目標定位精度。典型場景為2部機載雷達通過戰(zhàn)場數(shù)據(jù)鏈互相通信,完成探測情報的數(shù)據(jù)共享,每一部雷達各自進行探測數(shù)據(jù)融合,通過雙機數(shù)據(jù)的融合提高定位精度,最后對雙機融合結(jié)果進行了仿真評估。文獻[1]對分布式協(xié)同定位的精度進行分析,但沒分析載機在運動過程中由于位置變化對協(xié)同定位精度的影響;文獻[2]對定位精度的計算過程分析得詳細入微,但是缺少雷達站不同方位分布情況下定位精度的差異;文獻[3]對組網(wǎng)數(shù)據(jù)融合過程中的誤差源進行細致的分析,但沒有給出有效提高組網(wǎng)融合精度的方法。
本文針對雙機探測時的位置不同,主要對融合后定位精度的影響進行了分析,通過定位精度的變化可以評估雙機協(xié)同帶來的精度提升。從目前文獻對數(shù)據(jù)融合精度的研究現(xiàn)狀來看,大多研究更關(guān)注融合過程中的數(shù)值計算方法和計算過程中的誤差,而對運動平臺的多雷達融合精度影響的研究較少。因此,文中針對機載雷達協(xié)同探測時,載機位置運動對探測的融合精度進行了分析和推導,并進行仿真驗證,對運動平臺的融合定位精度進行評價。文中分析了理想情況下,雙機協(xié)同探測時數(shù)據(jù)融合后雷達探測距離、方位精度的計算方法。
1 系統(tǒng)模型
雷達量測的系統(tǒng)誤差模型如圖1所示,量測距離為r,量測方位角為θ。雷達量測誤差服從高斯分布,量測距離標準差為σr,量測方位標準差為σθ。量測距離服從高斯分布(0,σr),量測方位服從高斯分布(0,σθ)。雷達的量測誤差通常情況下存在距離誤差小而方位誤差偏大的特點,量測誤差示意圖如圖1所示。
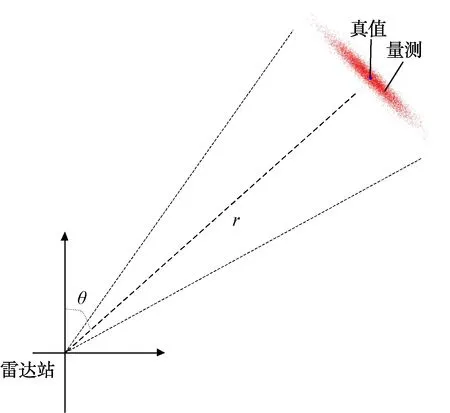
圖1 雷達量測誤差仿真模型
仿真場景如圖2所示,機載雷達B和C同時對目標A進行探測,雷達B和C將探測后的結(jié)果通過數(shù)據(jù)鏈共享探測數(shù)據(jù),然后各自進行數(shù)據(jù)融合。我們假設(shè)機載雷達為兩坐標雷達,只能測得距離和方位,不考慮高度影響。假設(shè)機載雷達B探測到目標A的距離和方位為(r1,θ1),機載雷達C探測到目標A的距離和方位為(r2,θ2)。這里假設(shè)系統(tǒng)可以做到時間精準同步,假設(shè)機載雷達B的量測距離均方根誤差為σr1,方位均方根誤差為σθ1;機載雷達C的量測距離均方根誤差為σr2,方位均方根誤差為σθ2。
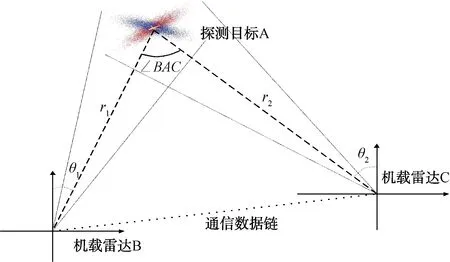
圖2 雙機協(xié)同探測場景
由于機載雷達B和C的運動,當雙機夾角∠BAC發(fā)生變化時,融合結(jié)果會發(fā)生變化,AB、AC的距離不同,融合結(jié)果也有區(qū)別,下面針對雙機的位置變化分析數(shù)據(jù)融合性能。
2 數(shù)據(jù)融合方法
數(shù)據(jù)融合處理是對多傳感器上報的量測點跡數(shù)據(jù)進行量測融合,融合完成后進行雷達目標跟蹤,本文只討論在卡爾曼濾波前進行量測融合后的精度變化情況。
量測融合方法可分為兩大類:量測合并(即數(shù)據(jù)壓縮)方法和串行處理方法。量測合并方法是指將多個傳感器在統(tǒng)一的時間軸上對同一目標的量測數(shù)據(jù)進行數(shù)據(jù)合并,將多個探測數(shù)據(jù)壓縮成1個數(shù)據(jù)。這種方法適合于天線同步掃描雷達,如一、二次雷達的綜合;而對于非同步采樣的多傳感器融合,如多部雷達數(shù)據(jù)的融合,則可以采用時間校準和目標狀態(tài)平移的方法,將異步數(shù)據(jù)變換成同步數(shù)據(jù)后再進行點跡的量測合并處理,最后進行跟蹤和濾波處理。
假設(shè)不考慮時間同步和狀態(tài)平移引起的誤差,設(shè)(r1,θ1)、(r2,θ2)分別為雷達1和雷達2的距離和方位的測量值,對2部雷達的量測值進行合并處理,可采用下式[4]對它們進行點跡合并:
(1)
(2)
上述公式為雷達融合誤差計算公式,從上述算式可以看出:估計的結(jié)果是各雷達的測量按精度加權(quán);合并后點跡精度有所提高。
量測數(shù)據(jù)合并在數(shù)據(jù)融合處理中有著廣泛的應(yīng)用,在通常的雷達融合處理中的處理流程是先接收多部雷達的量測數(shù)據(jù),然后對接收的數(shù)據(jù)進行狀態(tài)平移和時間對齊,時間對齊以后就可以對量測數(shù)據(jù)進行數(shù)據(jù)融合,最后對融合后的量測進行常規(guī)的跟蹤濾波。本文只對數(shù)據(jù)融合結(jié)果進行分析,數(shù)據(jù)融合流程如圖3所示,不同顏色的圓點表示不同雷達的探測點。

圖3 數(shù)據(jù)融合流程
從圖3不難看出,本文的融合處理方法有一個顯著特點是先進行量測數(shù)據(jù)融合,然后進行跟蹤濾波處理。在實際情報融合處理系統(tǒng)中,遇到的情況比較復雜,這里不做討論,下面單獨就量測數(shù)據(jù)的融合精度進行分析。
3 融合精度計算
根據(jù)文獻[5]中提出的無偏轉(zhuǎn)換的方法,將雷達量測誤差無偏轉(zhuǎn)換到直角坐標系下,然后在直角坐標系下采用公式(1)、(2)計算融合后的量測位置,最后再轉(zhuǎn)換到雷達量測極坐標系下計算融合誤差,最終通過融合精度比較,評估融合效果。
步驟如下:
(1) 進行量測預處理,對量測進行轉(zhuǎn)換,計算直角坐標系下量測誤差的均方差。
(3)
(2) 展開公式,將2個雷達的量測代入式(3)得到直角坐標系下的量測誤差的均方差:
(4)
(5)
(3) 根據(jù)公式(1)、(2)計算融合后的直角坐標系下的量測值xF,yF:
(6)
4 仿真實驗及評估
假設(shè)2部機載雷達都能探測到目標,2部機載雷達與目標距離在50~350 km之間,兩機夾角在0°~180°之間變化,場景如圖2所示。單部雷達的測角精度0.25°,測距精度60 m。基于以上條件,主要分析兩機運動過程中的融合精度的變化。理想情況下,采用上節(jié)中數(shù)據(jù)合并方法對量測數(shù)據(jù)進行融合,通過蒙特卡洛仿真方法對融合處理后的定位精度進行評估。
距離融合精度隨夾角和探測距離的變化關(guān)系如圖4(a)所示。根據(jù)仿真結(jié)果可以看到,融合后,當雙機夾角較小的情況下,距離精度明顯提高,計算方法參考第3節(jié)中融合方法;當雙機夾角接近90°時,由于雷達方位誤差影響,距離精度下降,且目標距離越遠距離精度下降越大。融合后的方位精度大幅提高,仿真結(jié)果與理論相符。
方位融合精度根據(jù)夾角和探測距離的變化關(guān)系如圖4(b)所示,根據(jù)仿真結(jié)果可以看到融合后當雙機夾角較小的情況下,方位精度明顯提高,計算方法參考第3節(jié)中公式;當雙機夾角接近90°時,由于雷達距離誤差相比方位誤差較小,方位精度有更明顯的提升,通過較高的距離精度彌補雷達方位精度較差的影響。融合后的目標探測距離精度大幅提高,仿真結(jié)果與理論相符。
圖4 雙機協(xié)同距離方位精度分析
5 結(jié)束語
通過實驗表明,采用雙機協(xié)同或多機協(xié)同的方式進行數(shù)據(jù)融合,能夠有效提升雷達探測精度,可以彌補方位探測誤差較大的缺點。實驗中采用雷達測距誤差60 m,測角誤差0.25°的輸入精度,經(jīng)過雙機融合后方位精度有明顯提升,距離精度可以采用過濾的方式保證距離精度不變,過濾處理后通過圖5可以看出雙機協(xié)同情況,雷達探測精度明顯提高,如表1所示。

圖5 雙機協(xié)同CEP精度分析
表1 雙機融合精度對比
猜你喜歡
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
數(shù)學年刊A輯(中文版)(2022年4期)2022-02-16 08:17:34
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
無線電通信技術(shù)(2021年4期)2021-07-13 08:58:28
無線電通信技術(shù)(2021年3期)2021-06-08 03:33:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
福利中國(2015年4期)2015-01-03 08:03:38