基于迭代滑模的船舶動力定位非線性控制
2020-10-20 05:43:04陳海力任鴻翔楊柏丞衣瑩
上海海事大學學報
2020年3期
陳海力 任鴻翔 楊柏丞 衣瑩

摘要:針對存在外界干擾的船舶動力定位控制問題,提出一種簡捷的迭代滑模控制算法。選擇迭代滑模面,并將其與反步法結合,設計迭代滑模控制律。采用Lyapunov理論對系統(tǒng)的穩(wěn)定性進行證明。將提出的控制算法與PID控制算法和傳統(tǒng)反步滑模控制算法進行理論分析比較和仿真結果比較,結果表明迭代滑模控制算法具有超調小,收斂速度快,穩(wěn)定性和魯棒性好的優(yōu)點。
關鍵詞:迭代滑模; Lyapunov理論; 積分補償; 動力定位控制; 反步法
中圖分類號:? U664.82
文獻標志碼:A
Ship dynamic positioning nonlinear control based on
iterative sliding mode
CHEN Haili1, REN Hongxiang1, YANG Baicheng1, YI Ying2
(1. Navigation College, Dalian Maritime University, Dalian 116026, Liaoning, China;
2. Offshore Enforcement Fleet, Dalian Agriculture and Countryside Development Service Center, Dalian 116113, Liaoning, China)
Abstract:
For the dynamic positioning control issue of ships with external interference, a simple iterative sliding mode control algorithm is proposed. The iterative sliding mode surface is selected and combined with the backstepping technique to design the iterative sliding mode control law. Lyapunov theory is used to prove the stability of the system. Through the comparison of theoretical analysis and simulation results of the proposed control algorithm, the PID control algorithm and the traditional backstepping sliding mode control algorithm, it is shown that the iterative sliding mode control algorithm is of the advantages of small overshoot, fast convergence, good stability and robustness.
Key words:
iterative sliding mode; Lyapunov theory; integral compensation; dynamic positioning control; backstepping technique
0 引 言
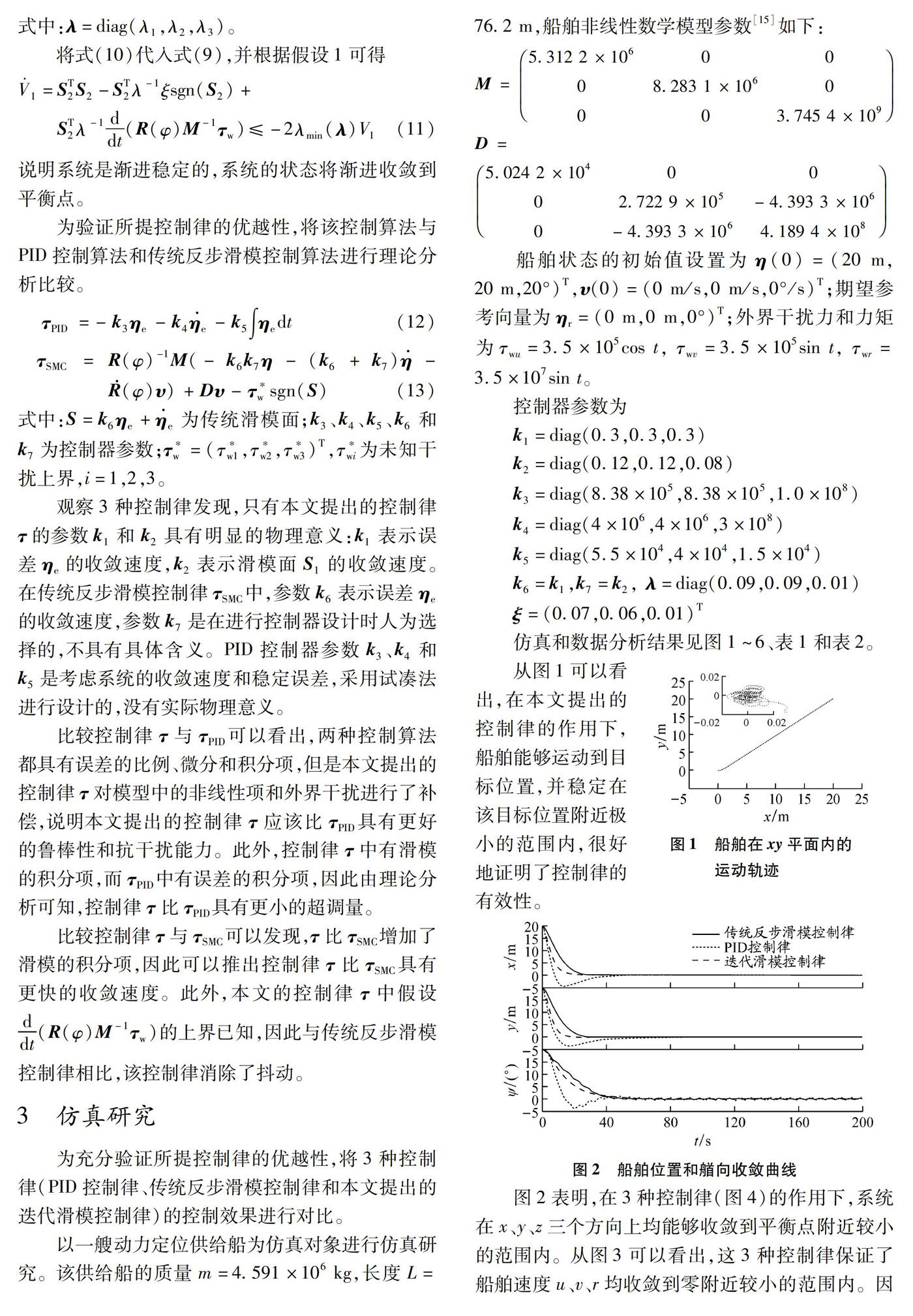
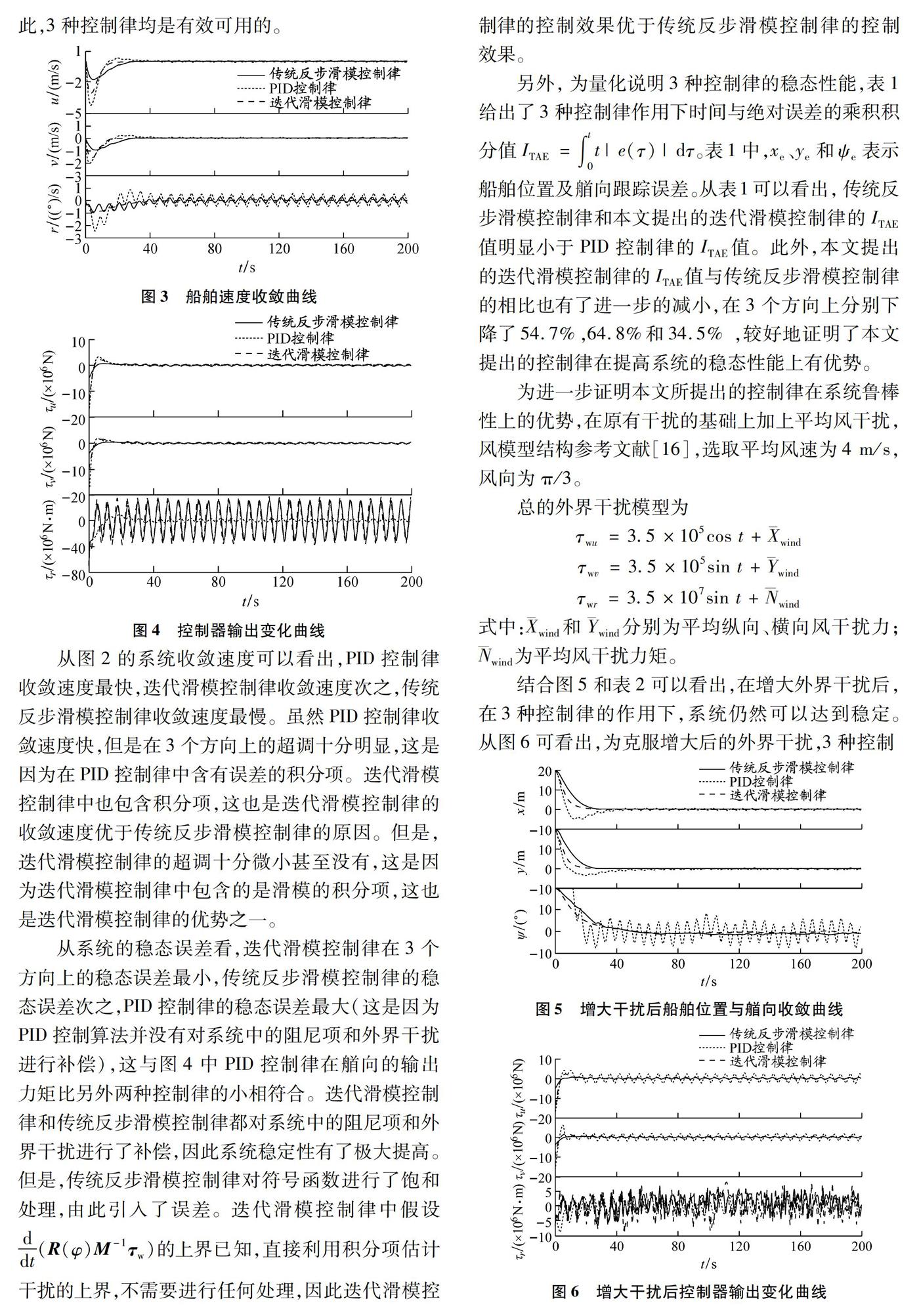
當今船舶動力定位控制方法層出不窮,典型的包括PID控制算法、反步(backstepping)控制算法、滑模控制算法、模型預測控制算法等。PID控制算法最早被成功應用到動力定位控制中。然而,該方法魯棒性差,且控制律中的積分項會導致系統(tǒng)有較大的超調量[1]。文獻[2-3]利用神經網絡和模糊方法對控制器參數(shù)進行了整定,使得系統(tǒng)超調量減小,仿真效果更好。文獻[4]將反步控制算法應用到船舶動力定位控制中,針對模型中的不確定項和外界干擾采用神經網絡進行自適應逼近,最后用Lyapunov理論進行了穩(wěn)定性證明。該方法的缺點是控制器參數(shù)不具有明確的意義,參數(shù)的選取主要依靠試湊法。文獻[5]將基于線性矩陣不等式的滑模控制算法應用到船舶動力定位控制中,通過設計矩陣不等式求解狀態(tài)反饋增益,采用飽和函數(shù)代替符號函數(shù)消除了抖動。仿真結果表明,與基本滑模控制算法相比,該算法保證船舶在橫向、縱向和艏向上的收斂速度都有極大提高。……
登錄APP查看全文
