一種隨機(jī)森林與深度學(xué)習(xí)結(jié)合的室內(nèi)定位方法
2020-10-20 05:43:04謝宏楊環(huán)
上海海事大學(xué)學(xué)報(bào) 2020年3期
關(guān)鍵詞:深度學(xué)習(xí)
謝宏 楊環(huán)

摘要:為更加實(shí)時(shí)、精確地識(shí)別運(yùn)輸設(shè)備的位置信息和特殊貨物的位置信息尤其是朝向信息以提高工作效率,利用仿真實(shí)驗(yàn)對(duì)室內(nèi)物體進(jìn)行定位和朝向判斷的探究。利用天線(xiàn)陣列布置室內(nèi)環(huán)境,在考慮電磁波極化特性的基礎(chǔ)上利用信道傳播模型進(jìn)行建庫(kù);利用隨機(jī)森林進(jìn)行朝向判斷后通過(guò)不同的深度學(xué)習(xí)模型進(jìn)一步實(shí)現(xiàn)定位。實(shí)驗(yàn)結(jié)果表明:該模型不僅能實(shí)現(xiàn)朝向判斷,而且其定位誤差比僅利用深度學(xué)習(xí)模型的定位誤差降低約0.14 m。
關(guān)鍵詞:室內(nèi)定位; 隨機(jī)森林; 深度學(xué)習(xí); 極化特性; 信道傳播模型
中圖分類(lèi)號(hào):? TN925
文獻(xiàn)標(biāo)志碼:A
An indoor location method combining random forest with deep learning
XIE Hong, YANG Huan
(Information Engineering College, Shanghai Maritime University, Shanghai 201306, China)
Abstract:
In order to identify the position information of transportation equipment and the position information of special goods, especially the orientation information, so as to improve the working efficiency, the simulation experiment is used to explore the position and orientation of indoor objects. The indoor environment is arranged by the antenna array, and the channel propagation model is used to build the database on the basis of considering the polarization characteristics of electromagnetic waves. The random forest is used to judge the orientation and then the location is further realized by different deep learning models. Experimental results show that the model can not only achieve orientation judgment, but also its location error reduces by about 0.14 m compared with that only using the deep learning model.
Key words:
indoor location; random forest; deep learning; polarization characteristic; channel propagation model
0 引 言
在移動(dòng)設(shè)備和互聯(lián)網(wǎng)高速發(fā)展的時(shí)代,定位技術(shù)的發(fā)展推動(dòng)了各行各業(yè)的進(jìn)步,在倉(cāng)儲(chǔ)物流、機(jī)械加工、家電加工等大型制造業(yè)搬運(yùn)區(qū)域,各種無(wú)人車(chē)等機(jī)器設(shè)備被引入運(yùn)輸作業(yè)中,節(jié)省了大量的人力,提高了工作效率。全球定位系統(tǒng)(global positioning system,GPS)雖然能夠?qū)κ彝舛ㄎ患夹g(shù)提供強(qiáng)有力的支撐,但GPS信號(hào)因受到建筑物的遮擋而無(wú)法到達(dá)室內(nèi),且室內(nèi)環(huán)境存在信號(hào)干擾、多徑和非視距等的影響,因此室內(nèi)定位一直是學(xué)者們廣泛研究和關(guān)注的問(wèn)題。
基于測(cè)距的定位方法有接收信號(hào)強(qiáng)度(received signal strength,RSS)、到達(dá)時(shí)間(time of arrival,TOA)、達(dá)到角度(angle of arrival,AOA)和到達(dá)時(shí)間差(time difference of arrival,TDOA)算法。TOA或AOA算法要求收發(fā)端具有嚴(yán)格的時(shí)鐘同步,而且AOA算法需要接收端電路能夠準(zhǔn)確獲得入射波角度,它們都對(duì)接收端提出了較高要求[1]。隨著機(jī)器學(xué)習(xí)的廣泛應(yīng)用,RSS算法受到研究者的關(guān)注,如:李瑛等[2]通過(guò)神經(jīng)網(wǎng)絡(luò)擬合RSS與坐標(biāo)的關(guān)系,進(jìn)而實(shí)現(xiàn)定位。隨著深度學(xué)習(xí)的興起,研究者們將深度學(xué)習(xí)應(yīng)用于室內(nèi)定位上,如:文獻(xiàn)[3-4]利用深度置信網(wǎng)絡(luò)(deep belief networks,DBN)模型對(duì)RSS指紋的特征進(jìn)行訓(xùn)練和測(cè)試來(lái)實(shí)現(xiàn)定位;孫晶[5]使用路徑-損耗模型對(duì)室內(nèi)環(huán)境進(jìn)行建模,利用DBN無(wú)監(jiān)督地學(xué)習(xí)RSS特征,然后利用歐氏距離進(jìn)行定位。上述文獻(xiàn)利用DBN模型對(duì)RSS指紋信息進(jìn)行訓(xùn)練和測(cè)試,其定位效果比傳統(tǒng)算法模型的好,但DBN模型在表示數(shù)據(jù)內(nèi)部特征方面有一定困難,而且學(xué)習(xí)過(guò)程較慢,不合適的參數(shù)會(huì)導(dǎo)致局部最優(yōu)解。文獻(xiàn)[6-7]提出先利用自編碼器(autoencoder,AE)進(jìn)行RSS特征提取形成指紋庫(kù),然后利用鄰近法進(jìn)行匹配定位,但是由于鄰近法定位方式很大程度上依賴(lài)樣本的疏密,對(duì)定位精度的提高有限。以往文獻(xiàn)有很多關(guān)于物體定位的研究,但對(duì)于物體在某一位置的朝向以及物體的朝向?qū)Χㄎ痪鹊挠绊懭狈ρ芯俊T趯?shí)際環(huán)境中由于電磁波的極化特性,接收端的RSS會(huì)受到收發(fā)端天線(xiàn)朝向的影響,從而說(shuō)明物體的朝向會(huì)對(duì)定位精度造成一定的影響。另外,一些特殊貨物,如不可倒置的裝有液體的包裝容器、大型設(shè)備等,也需要對(duì)朝向進(jìn)行判斷。如果能夠?qū)崟r(shí)有效地確定物體或設(shè)備的位置和朝向,那么一方面可以為無(wú)人車(chē)等進(jìn)一步的路徑規(guī)劃提供基礎(chǔ),提高工作效率,另一方面可以對(duì)貨物進(jìn)行實(shí)時(shí)監(jiān)控。
針對(duì)以上問(wèn)題,本文提出一種基于隨機(jī)森林(random forest,RF)和深度學(xué)習(xí)的室內(nèi)定位方法,分為離線(xiàn)訓(xùn)練和在線(xiàn)定位階段。離線(xiàn)訓(xùn)練階段:利用信道傳播模型建立數(shù)據(jù)庫(kù),并根據(jù)朝向的不同進(jìn)行深度模型訓(xùn)練。在線(xiàn)定位階段:利用RF算法進(jìn)行朝向判斷后輸入不同的深度學(xué)習(xí)模型。本文方法既可以對(duì)標(biāo)簽的朝向進(jìn)行判斷,又可以對(duì)標(biāo)簽進(jìn)行更精確的定位。
1 定位系統(tǒng)中指紋數(shù)據(jù)集的建立
1.1 天線(xiàn)傳播模型的建立
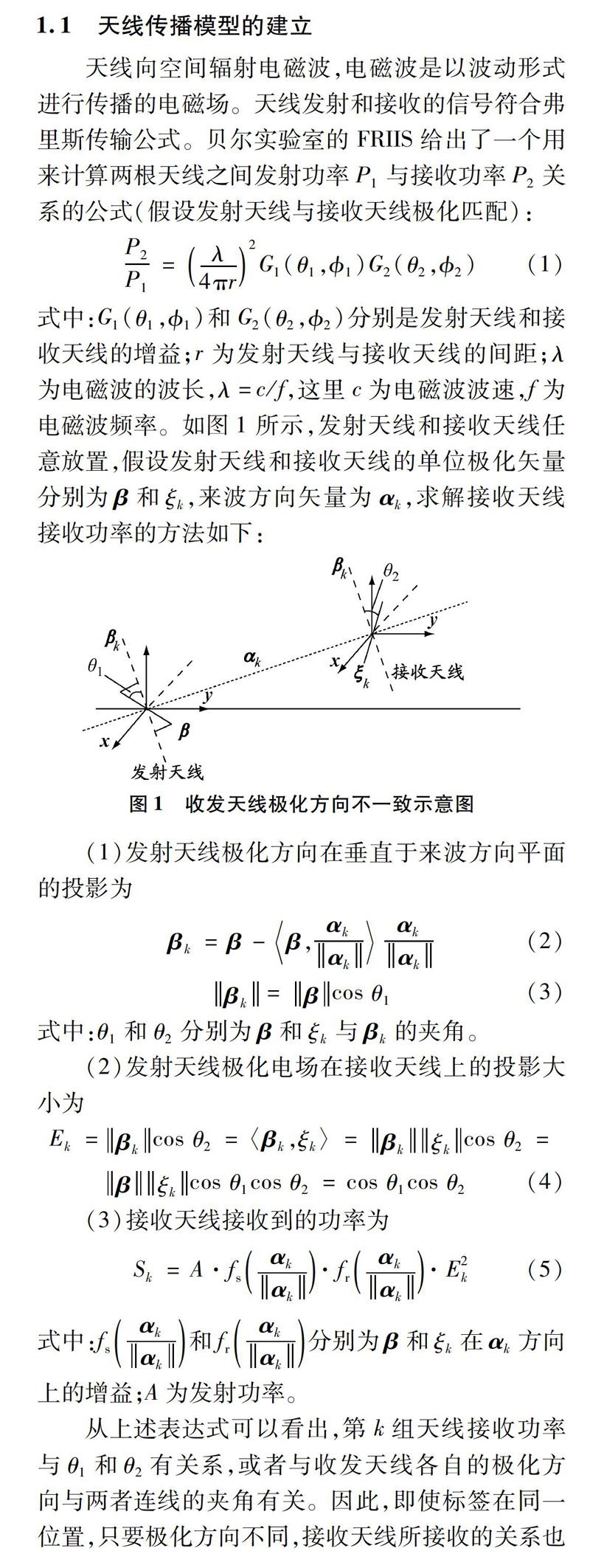
天線(xiàn)向空間輻射電磁波,電磁波是以波動(dòng)形式進(jìn)行傳播的電磁場(chǎng)。天線(xiàn)發(fā)射和接收的信號(hào)符合弗里斯傳輸公式。貝爾實(shí)驗(yàn)室的FRIIS給出了一個(gè)用來(lái)計(jì)算兩根天線(xiàn)之間發(fā)射功率P1與接收功率P2關(guān)系的公式(假設(shè)發(fā)射天線(xiàn)與接收天線(xiàn)極化匹配):
式中:G1(θ1,1)和G2(θ2,2)分別是發(fā)射天線(xiàn)和接收天線(xiàn)的增益;r為發(fā)射天線(xiàn)與接收天線(xiàn)的間距;λ為電磁波的波長(zhǎng),λ=c/f,這里c為電磁波波速,f為電磁波頻率。如圖1所示,發(fā)射天線(xiàn)和接收天線(xiàn)任
意放置,假設(shè)發(fā)射天線(xiàn)和接收天線(xiàn)的單位極化矢量
分別為β和ξk,來(lái)波方向矢量為αk,求解接收天線(xiàn)接收功率的方法如下:
式中:fsαkαk和frαkαk分別為β和ξk在αk方向上的增益;A為發(fā)射功率。
從上述表達(dá)式可以看出,第k組天線(xiàn)接收功率與θ1和θ2有關(guān)系,或者與收發(fā)天線(xiàn)各自的極化方向與兩者連線(xiàn)的夾角有關(guān)。因此,即使標(biāo)簽在同一位置,只要極化方向不同,接收天線(xiàn)所接收的關(guān)系也是不一樣的,需要建立映射關(guān)系進(jìn)一步進(jìn)行分析。
1.2 指紋數(shù)據(jù)庫(kù)的獲取
數(shù)據(jù)集建立的主要方法有實(shí)地測(cè)量法和傳播模型法。采用實(shí)地測(cè)量法獲取的數(shù)據(jù)集一般較為準(zhǔn)確,但當(dāng)服務(wù)區(qū)域范圍比較大時(shí)比較費(fèi)時(shí)費(fèi)力,尤其是當(dāng)服務(wù)區(qū)域發(fā)生變化或者更換成其他服務(wù)區(qū)域時(shí),數(shù)據(jù)集要重新采集。
采用構(gòu)建傳播模型的方式獲取數(shù)據(jù)集的好處在于過(guò)程比較快,不受限于固定的區(qū)域。當(dāng)區(qū)域發(fā)生改變時(shí),數(shù)據(jù)集更新也更加方便。傳播模型主要有路徑-損耗模型和信道傳播模型。本文使用構(gòu)建傳播模型的方式得到指紋數(shù)據(jù)庫(kù)。以往的研究一般使用經(jīng)驗(yàn)?zāi)P偷玫街讣y數(shù)據(jù)庫(kù),本文要解決的是位置和朝向的確定問(wèn)題,路徑-損耗模型不適用,因此采用信道傳播模型。具體方法是利用天線(xiàn)陣列進(jìn)行信號(hào)的接收,利用考慮天線(xiàn)極化的弗里斯傳輸公式,得到每個(gè)標(biāo)簽的坐標(biāo)以及每個(gè)坐標(biāo)處的4個(gè)朝向、12根天線(xiàn)接收的信號(hào),記入指紋數(shù)據(jù)庫(kù)。
2 算法介紹
2.1 RF原理
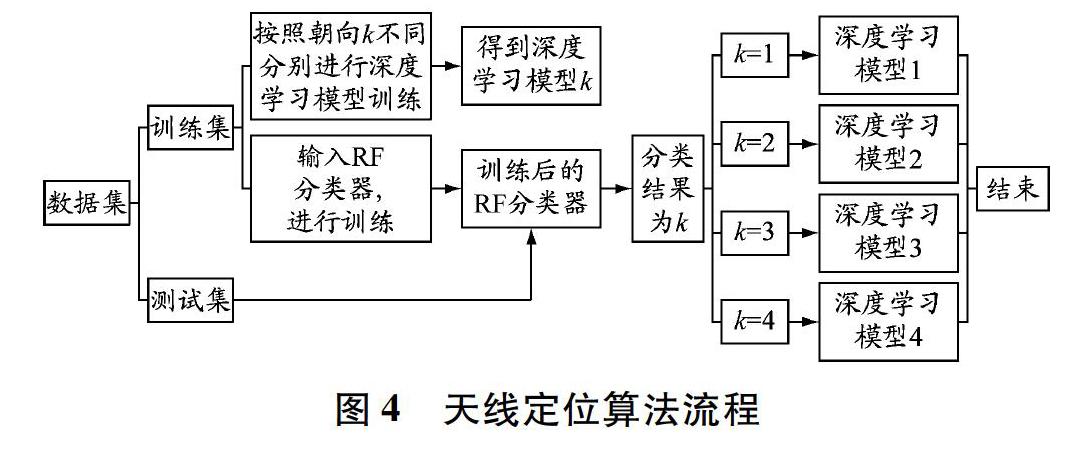
RF在2001年由BREIMAN提出,是一種建立在統(tǒng)計(jì)理論基礎(chǔ)上的組合分類(lèi)器。RF分類(lèi)器的基礎(chǔ)是決策樹(shù)分類(lèi)器,RF由多棵決策樹(shù)構(gòu)成,其決策結(jié)果由多棵決策樹(shù)分類(lèi)結(jié)果的眾數(shù)決定。RF的基本構(gòu)建流程是:假設(shè)由特征向量樣本構(gòu)成的原始訓(xùn)練集合為Y={X1,X2,…,XN},應(yīng)用bootstrap方法有放回地每次從Y中隨機(jī)抽取k個(gè)樣本,抽取s次,構(gòu)成自主樣本集{Tj}j=1,2,…,s,其中Tj={Xj1,Xj2,…,XjN}。假設(shè)每個(gè)特征樣本Xi具有m個(gè)屬性(特征分量),隨機(jī)抽取{Tj}中每個(gè)Xji的z(z RF由于具有上述特點(diǎn),在一定程度上避免了過(guò)擬合問(wèn)題,在分類(lèi)方面得到了廣泛應(yīng)用。影響RF分類(lèi)性能的主要因素是:森林中每棵樹(shù)的分類(lèi)強(qiáng)度和樹(shù)間的相關(guān)度。在訓(xùn)練中,RF模型需要設(shè)置的參數(shù)比較多,但在實(shí)際使用中主要調(diào)節(jié)的參數(shù)就是決策樹(shù)的個(gè)數(shù)和最大特征個(gè)數(shù)。其調(diào)節(jié)過(guò)程如下: (1)其他參數(shù)保持默認(rèn)值,對(duì)決策樹(shù)的個(gè)數(shù)從小到大進(jìn)行遍歷;(2)選擇使得分類(lèi)結(jié)果正確率最高的決策樹(shù)的個(gè)數(shù)R;(3)保持決策樹(shù)的個(gè)數(shù)以及其他參數(shù)不變,改變參數(shù)最大特征數(shù);(4)選擇使得分類(lèi)結(jié)果正確率最高的最大特征數(shù)M;(5)利用最優(yōu)的決策樹(shù)個(gè)數(shù)R和最大特征數(shù)M進(jìn)行分類(lèi)。 2.2 深度學(xué)習(xí) 深度學(xué)習(xí)的概念由HINTON等2006年提出。研究者對(duì)深度學(xué)習(xí)模型進(jìn)行了多方面的應(yīng)用研究,如人臉識(shí)別[8]、回歸預(yù)測(cè)[9-10]等,無(wú)一不展示了深度學(xué)習(xí)強(qiáng)大的學(xué)習(xí)能力。本文利用深度學(xué)習(xí)對(duì)復(fù)雜傳播模型進(jìn)行模擬,按照朝向的不同,通過(guò)大量的訓(xùn)練樣本訓(xùn)練不同的深度學(xué)習(xí)網(wǎng)絡(luò)模型。 2.2.1 AE AE是神經(jīng)網(wǎng)絡(luò)的一種,其結(jié)構(gòu)與神經(jīng)網(wǎng)絡(luò)相同。AE由一個(gè)編碼器(encoder)函數(shù)h=f(x)與一個(gè)解碼器(decoder)函數(shù)r=g(x)組合而成。編碼器將輸入數(shù)據(jù)轉(zhuǎn)換成一種不同的表示h,解碼器則將這個(gè)新的表示轉(zhuǎn)換到原來(lái)的形式。因此,AE的目的就是使得輸出與原始的輸入盡量保持一致。AE結(jié)構(gòu)見(jiàn)圖3。 2.2.2 神經(jīng)網(wǎng)絡(luò)算法 BP(back propagation)神經(jīng)網(wǎng)絡(luò)一般由多層神經(jīng)元組成的網(wǎng)絡(luò)結(jié)構(gòu)構(gòu)成。最基本的BP神經(jīng)網(wǎng)絡(luò)由3層構(gòu)成,分別是輸入層、隱含層和輸出層。每層都由多個(gè)神經(jīng)元組成。同層神經(jīng)元之間無(wú)連接,后一層神經(jīng)元的輸出是由前一層神經(jīng)元線(xiàn)性組合后進(jìn)行函數(shù)運(yùn)算得到的。一般情況下,3層網(wǎng)絡(luò)結(jié)構(gòu)便可以表示任意非線(xiàn)性函數(shù)。網(wǎng)絡(luò)的訓(xùn)練根據(jù)網(wǎng)絡(luò)的輸出與輸入的比較結(jié)果反向調(diào)節(jié)權(quán)值和閾值,從而使得網(wǎng)絡(luò)輸出更接近理論輸出。 2.3 算法過(guò)程 2.3.1 數(shù)據(jù)的獲取和處理 按照弗里斯傳輸公式,在考慮電磁波極化的情況下得出接收天線(xiàn)的信號(hào)強(qiáng)度。這里假設(shè)發(fā)射功率為P1=10 W,工作頻率為2 GHz,發(fā)射機(jī)增益為G1(θ1,1)=sin2θ1,接收機(jī)增益為G2(θ2,2)=sin2θ2。按照傳播模型得出信號(hào)強(qiáng)度。 假設(shè):將n根天線(xiàn)接收信號(hào)表示為Ri=(Ri1,Ri2,…,Rin);主要考慮二維平面內(nèi)的定位,z坐標(biāo)值為定值,因此建庫(kù)時(shí)不考慮z坐標(biāo),天線(xiàn)坐標(biāo)的位置可表示為(xi,yi);天線(xiàn)朝向序號(hào)為k(k=1,2,3,4)。數(shù)據(jù)庫(kù)中的第i條指紋就表示為{xi,yi,Ri1,Ri2,…,Rin,k}。 2.3.2 天線(xiàn)定位 天線(xiàn)定位分兩步:(1)利用RF算法進(jìn)行朝向的確定;(2)用不同的深度學(xué)習(xí)模型進(jìn)行回歸定位。定位具體方法為:(1)將數(shù)據(jù)隨機(jī)分為訓(xùn)練集和測(cè)試集;(2)將訓(xùn)練數(shù)據(jù)輸入RF分類(lèi)器進(jìn)行訓(xùn)練;(3)將訓(xùn)練數(shù)據(jù)按照4個(gè)朝向分為4組訓(xùn)練數(shù)據(jù),分別進(jìn)行深度學(xué)習(xí)回歸定位的訓(xùn)練;(4)將測(cè)試數(shù)據(jù)輸入RF分類(lèi)器,按照分類(lèi)結(jié)果輸入對(duì)應(yīng)的深度學(xué)習(xí)模型進(jìn)行定位。算法流程見(jiàn)圖4。 3 仿真結(jié)果及其分析 3.1 仿真環(huán)境 此次仿真是利用MATLAB R2015b完成的,在離線(xiàn)建庫(kù)階段利用天線(xiàn)的傳播模型對(duì)室內(nèi)傳播信號(hào)的情況進(jìn)行模擬。此次實(shí)驗(yàn)對(duì)傳播介質(zhì)、陣列的工作環(huán)境、信號(hào)以及噪聲都進(jìn)行了合理的理想化假設(shè)。在5 m高的房頂選擇20 m×20 m的場(chǎng)地,在這個(gè)場(chǎng)地中央選取半徑為3 m的圓形區(qū)域,在圓周上均勻豎直放置6對(duì)天線(xiàn),因此信號(hào)強(qiáng)度矢量的長(zhǎng)度為12。以圓心為原點(diǎn)建立坐標(biāo)系,z軸豎直向下。將標(biāo)簽放置在地面上,并在同一位置朝向4個(gè)方向,其中x軸正向記為1號(hào)方向,x軸負(fù)向記為2號(hào)方向,y軸正向記為3號(hào)方向,y軸負(fù)向記為4號(hào)方向,每個(gè)方向上都得到一條信號(hào)強(qiáng)度信息。將位置坐標(biāo)、信號(hào)強(qiáng)度矢量和標(biāo)簽朝向作為一條指紋數(shù)據(jù)計(jì)入數(shù)據(jù)庫(kù)。 3.2 實(shí)驗(yàn)結(jié)果 3.2.1 對(duì)測(cè)試數(shù)據(jù)進(jìn)行方向分類(lèi) 利用兩種方式進(jìn)行分類(lèi),一個(gè)是RF分類(lèi)器分類(lèi),另一個(gè)是BP神經(jīng)網(wǎng)絡(luò)分類(lèi)。比較兩種分類(lèi)方式的分類(lèi)效果,進(jìn)而選擇較優(yōu)的分類(lèi)器。兩種分類(lèi)方式對(duì)標(biāo)簽朝向向判斷的準(zhǔn)確率隨信噪比(signal to noise ratio,SNR)的變化情況見(jiàn)圖5。 從圖5可以看出當(dāng)SNR從0變化到30 dB時(shí)BP神經(jīng)網(wǎng)絡(luò)和RF分類(lèi)器對(duì)標(biāo)簽朝向判斷的準(zhǔn)確率的變 化情況。1號(hào)、2號(hào)和3號(hào)方向RF分類(lèi)器對(duì)標(biāo)簽朝向判斷的準(zhǔn)確率基本上都比BP神經(jīng)網(wǎng)絡(luò)的高,僅4號(hào)方向RF分類(lèi)器對(duì)標(biāo)簽朝向判斷的準(zhǔn)確率比BP神經(jīng)網(wǎng)絡(luò)的略低。由圖5e可以看出,整體上RF分類(lèi)器的分類(lèi)效果明顯比BP神經(jīng)網(wǎng)絡(luò)的好。因此,采用RF分類(lèi)器進(jìn)行分類(lèi),從而確定標(biāo)簽的朝向。 3.2.2 利用深度學(xué)習(xí)進(jìn)行定位 為研究物體朝向的確定對(duì)定位的重要性,在SNR為20 dB的情況下進(jìn)行對(duì)比實(shí)驗(yàn): 方法一:將訓(xùn)練數(shù)據(jù)按標(biāo)簽朝向分類(lèi)后分別輸入4個(gè)深度學(xué)習(xí)模型網(wǎng)絡(luò),訓(xùn)練完成后將按照朝向分類(lèi)后的測(cè)試數(shù)據(jù)輸入對(duì)應(yīng)的深度學(xué)習(xí)模型進(jìn)行定位。 方法二:將訓(xùn)練數(shù)據(jù)直接輸入深度學(xué)習(xí)模型網(wǎng)絡(luò),訓(xùn)練完成后將測(cè)試數(shù)據(jù)直接輸入深度學(xué)習(xí)模型進(jìn)行定位。 將數(shù)據(jù)分為訓(xùn)練集和測(cè)試集,先后進(jìn)行兩次實(shí)驗(yàn),首先在不區(qū)分朝向的情況下直接利用深度學(xué)習(xí)算法進(jìn)行定位,然后先區(qū)分朝向再進(jìn)行定位。實(shí)驗(yàn)結(jié)果見(jiàn)圖6。 比較圖6a與6b可知,區(qū)分朝向的深度學(xué)習(xí)模型的定位效果直觀上比未區(qū)分朝向的深度學(xué)習(xí)模型的好,前者比后者的平均定位誤差約小0.14 m。為更加有效地說(shuō)明實(shí)驗(yàn)結(jié)論的普遍性,隨機(jī)選取測(cè)試集,進(jìn)行100次實(shí)驗(yàn),平均定位誤差見(jiàn)圖7。 由圖7可以看出,在100次實(shí)驗(yàn)中,在先進(jìn)行朝向分類(lèi),再利用不同的深度學(xué)習(xí)模型定位的情況下,平均定位誤差更低。 4 結(jié)束語(yǔ) 針對(duì)大型制造業(yè)、物流業(yè)等運(yùn)輸設(shè)備和工作人員在識(shí)別貨物朝向和位置方面面臨的問(wèn)題,提出一種基于隨機(jī)森林(RF)和深度學(xué)習(xí)的定位方法。先利用RF判斷標(biāo)簽朝向再利用深度學(xué)習(xí)進(jìn)行定位的方法較傳統(tǒng)方法顯示出了獨(dú)特的優(yōu)勢(shì),不僅能夠確定物體的位置而且能分辨物體的朝向。對(duì)不可倒置貨物,如電冰箱、裝有液體的包裝容器等,可以進(jìn)行實(shí)時(shí)、準(zhǔn)確的朝向判斷。該方法增加了物體朝向的判斷,因此在一定程度上增加了時(shí)間開(kāi)銷(xiāo),以較低的時(shí)間開(kāi)銷(xiāo)為代價(jià)獲取更為顯著的定位效果對(duì)于實(shí)際定位情況具有更大的意義。由于在實(shí)際環(huán)境中室內(nèi)信號(hào)的多徑、色散等會(huì)對(duì)信號(hào)接收造成一定的影響,下一步將使用實(shí)際的發(fā)射器和接收器進(jìn)行實(shí)際測(cè)量并進(jìn)行定位實(shí)驗(yàn),以期幫助倉(cāng)儲(chǔ)物流行業(yè)、大型制造業(yè)、大型商場(chǎng)等對(duì)無(wú)人車(chē)、特殊貨物等進(jìn)行位置和方向的監(jiān)管。 參考文獻(xiàn): [1]孫豫斌, 黃臻, 高瑞祥, 等. 基于RSS的可見(jiàn)光室內(nèi)定位系統(tǒng)[J]. 儀表技術(shù)與傳感器, 2018(11): 80-84. [2]李瑛, 胡志剛. 一種基于BP神經(jīng)網(wǎng)絡(luò)的室內(nèi)定位模型[J]. 計(jì)算技術(shù)與自動(dòng)化, 2007, 26(2): 77-80. [3]高歡斌. 基于深度學(xué)習(xí)的室內(nèi)定位算法研究[D]. 成都: 電子科技大學(xué), 2016. [4]GAO Lingjun. Channel state information fingerprinting based indoor localization: a deep learning approach[D]. Alabama: Auburn University, 2015. [5]孫晶. 基于深度學(xué)習(xí)和位置指紋的RFID室內(nèi)定位算法研究[D]. 長(zhǎng)春: 吉林大學(xué), 2018. [6]李嘉俊. 基于深度學(xué)習(xí)的WiFi室內(nèi)定位算法研究[D]. 廣州: 廣東工業(yè)大學(xué), 2018. [7]薛偉, 陳璟, 張熠. 基于深度學(xué)習(xí)的WiFi與iBeacon融合的室內(nèi)定位方法[J]. 計(jì)算機(jī)工程與應(yīng)用, 2019, 55(1): 29-34. DOI: 10.3778/j.issn.1002-8331.1809-0143. [8]UDDIN M Z, HASSAN M M, ALMOGREN A, et al. A facial expression recognition system using robust face features from depth videos and deep learning[J]. Computers & Electrical Engineering, 2017, 63: 114-125. DOI: 10.1016/j.compeleceng.2017.04.019. [9]李彬, 彭曙蓉, 彭君哲, 等. 基于深度學(xué)習(xí)分位數(shù)回歸模型的風(fēng)電功率概率密度預(yù)測(cè)[J]. 電力自動(dòng)化設(shè)備, 2018, 38(9): 15-20. DOI: 10.16081/j.issn.1006-6047.2018.09.003. [10]MA Xiaolei, YU Haiyang, WANG Yunpeng, et al. Large-scale transportation network congestion evolution prediction using deep learning theory[J]. PLOS ONE, 2015, 10: 1-17. DOI: 10.1371/journal.pone.0119044. (編輯 賈裙平) 收稿日期: 2019-05-16 修回日期: 2019-07-31 基金項(xiàng)目: 國(guó)家自然科學(xué)基金(61550110252) 作者簡(jiǎn)介: 謝宏(1962—),男,陜西漢中人,教授,碩導(dǎo),研究方向?yàn)槿斯ぶ悄芗夹g(shù)及應(yīng)用系統(tǒng),(E-mail)hongxie@shmtu.edu.cn 楊環(huán)(1992—),女,山東德州人,碩士研究生,研究方向?yàn)橐苿?dòng)通信與無(wú)線(xiàn)接入技術(shù),(E-mail)1269764506@qq.com
猜你喜歡
中國(guó)教育技術(shù)裝備(2016年19期)2016-12-27 19:23:52
中國(guó)遠(yuǎn)程教育(2016年11期)2016-12-27 18:07:31
現(xiàn)代商貿(mào)工業(yè)(2016年25期)2016-12-26 09:58:02
江蘇教育·中學(xué)教學(xué)版(2016年11期)2016-12-21 11:45:08
江蘇教育·中學(xué)教學(xué)版(2016年11期)2016-12-21 11:36:29
現(xiàn)代情報(bào)(2016年10期)2016-12-15 11:50:53
考試周刊(2016年94期)2016-12-12 12:15:04
新教育時(shí)代·教師版(2016年23期)2016-12-06 06:02:38
法制與社會(huì)(2016年32期)2016-12-01 15:25:53
軟件導(dǎo)刊(2016年9期)2016-11-07 22:20:49
