基于虛擬同步發電機技術的岸電并網控制
2020-10-23 09:20:08王含瑜
機電設備 2020年5期
王含瑜
(上海海事大學 物流工程學院,上海201306)
0 引言
近些年來隨著我國經濟的發展也順勢推動了航運業的迅猛發展。但同時,為船舶提供動力的船用發電機也成為了海上運輸行業絕大部分的污染物的來源。為了應對氣候變暖這個問題的嚴峻考驗,2018年4月,國際海事組織對航運業溫室氣體減排任務做出了初步的部署,提出了到2050年時溫室氣體的年度總排放量與2008年相較減少50%以上[1],并逐步實現碳排放為零的戰略目標。
隨著航運業的環保發展戰略不斷貫徹深入,一些港口城市的空氣質量問題也是社會廣泛關注的話題。由于船舶在靠岸期間需要開動船上的輔助發電機發電以滿足船用電氣設備的用電需求,因此會產生大量有害氣體的排放,污染港口城市的空氣質量。根據近些年來已知的數據統計,在靠港期間由船舶發電機所產生的碳排放量在港口總排碳量的占比達到了40%~70%[2]。出于環保的角度考慮,船舶在靠港停泊期間使用岸電供電,將預計能夠減少高達98%的船舶靠港時溫室氣體的排放。
1 船舶岸電并網控制系統結構
船舶岸電技術又稱為岸上連接或船舶電力替代系統等,是指靠港船舶接入岸電系統,由陸上的岸電為船舶提供停靠在港時的生產作業用電,而減少由于其發電機所產生的污染的一種港區空氣環境治理方式。在岸電系統構成方面,盡管幾乎每一個岸電方案都互不相同,但其具體的組成結構一般都分為以下3個部分:岸上的供電系統,電纜的連接設備和船舶的受電系統[3]。具體結構圖如圖1所示。
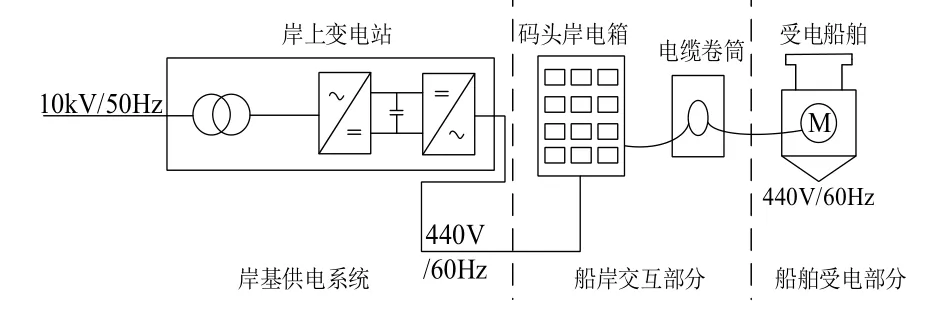
圖1 船舶岸電系統結構圖
船舶岸電系統中最重要的組成部分就是岸電變流器,岸電變流器從本質上講就是一個大型的變頻變壓器。由于全球各國采用的岸電電源和各個船舶采用的電源頻率為50 Hz或60 Hz不確定性;同時,船舶也有高壓船舶和低壓船舶。這就使得岸電系統需要具備變頻變壓的功能,以滿足不同靠港船舶的需求[4]。圖2為船舶岸電系統的結構圖。
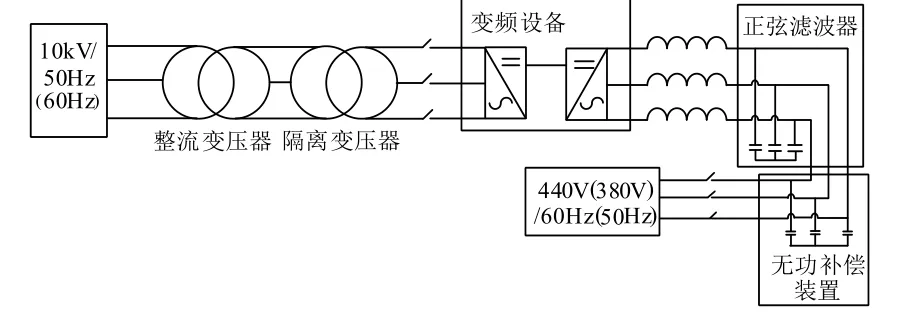
圖2 船舶岸電系統結構圖
岸電電源發出的三相交流電經整流器整流成直流電輸入到逆變器中,直流電經過逆變器轉變為三相交流電,后經過LC 濾波器的作用形成符合要求的三相正弦交流電給不同種類的船舶供電。
2 虛擬同步機技術控制方案
虛擬同步發電機技術(Virtual Synchronous Generator Technology,VSG)相較于傳統的并網控制策略的優越性就是可以使岸電電源具備旋轉慣性和阻尼特性[4]。這兩種運行特性在同步發電機中是真實存在的,因此虛擬同步機控制控制策略在提高岸電系統穩定性上有較好的控制效果。
本文重點研究岸電系統逆變器的控制策略。圖3為基于VSG的岸電逆變器拓撲結構及控制框圖。
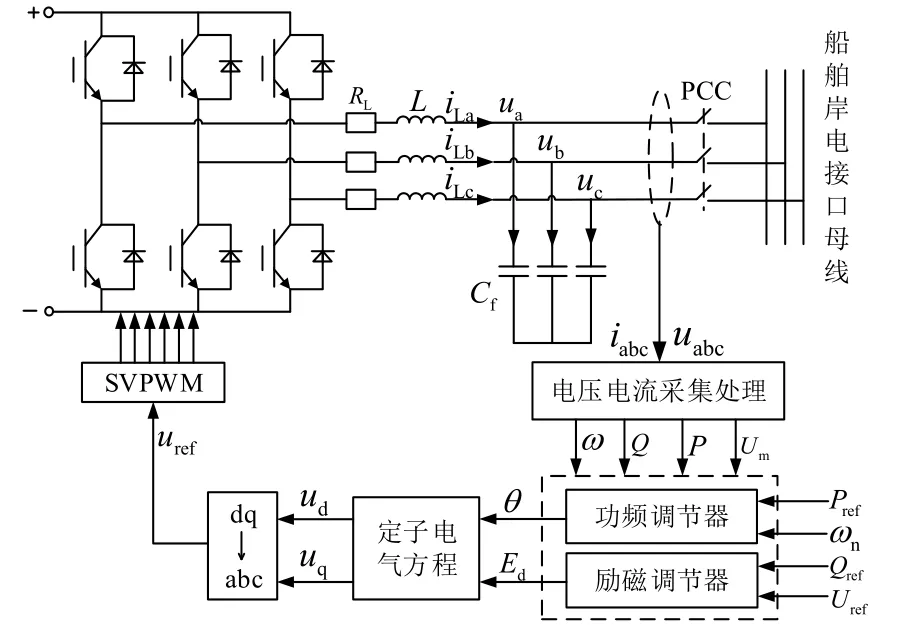
圖3 基于VSG 的岸電逆變器拓撲結構及控制框圖
3 基于頻率與電壓的并網優化控制策略
3.1 功頻調節器模塊
功頻調節器的數學模型包括原動機調節和發電機轉子運動方程兩部分,此為發電機的機械部分[5],具體關系見式(1)
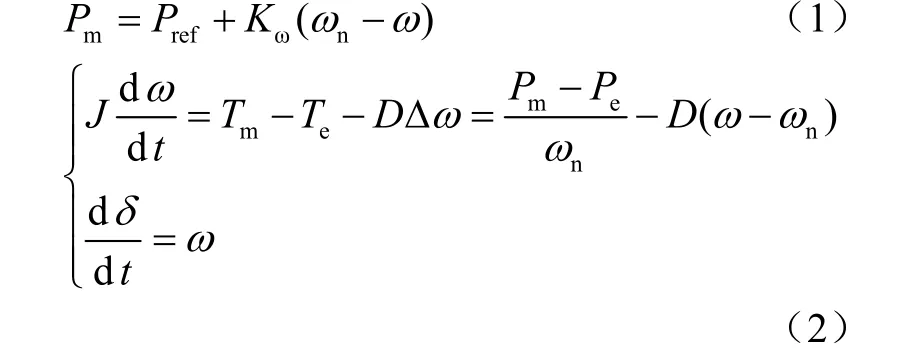
式中:Pm為機械功率;Pref為給定電磁功率;Kω為角頻率調差系數;ω為實際轉子角頻率;ωn為額定轉子角頻率;Tm為機械轉矩;Te為電磁轉矩;Pm為機械功率;Pe為電磁功率;D為阻尼系數;J為轉動慣量;δ為功角。其中,電磁功率Pe即為岸電逆變器的輸出功率P。
結合上述數學模型分析,所設計的功頻調節器的控制框圖如圖4所示。

圖4 功頻調節器控制框圖
3.2 勵磁調節器模塊
同步發電機另一個重要的組成部分是勵磁系統,它也能直接地影響發電機的運行特性。在正常的運行工況下,勵磁系統的存在能維持發電機的機端電壓在給定水平,當岸電和船舶輔機并聯運行時,應通過勵磁系統穩定地分配機組的無功功率。將對無功-電壓控制的勵磁調節器也引入到岸電系統的控制中來,得到相關的表達式。

式中:Uref為機端電壓幅值參考值;UN為設定的系統額定電壓幅值;n為無功電壓下垂系數;Qref為無功功率參考值;Q為輸出無功功率。
所設計的勵磁控制器的控制框圖如圖5所示。
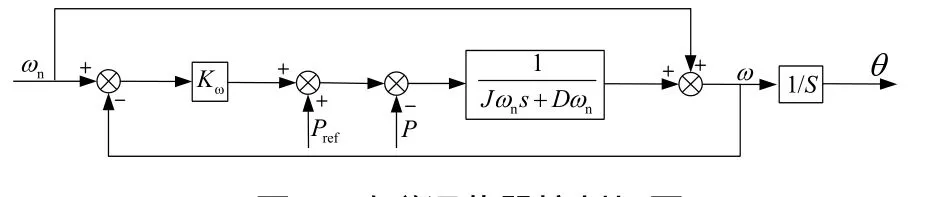
圖5 勵磁調節器控制框圖
其中,Um為經計算得到的實際并網電壓幅值,Ed為勵磁電動勢幅值。
總之,通過將功頻調節器以及勵磁調節器引入到岸電并網逆變器的閉環控制策略中,最終使得逆變器有了和同步發電機相似的運行特性,從而可以將其等效成一臺虛擬同步發電機進行分析和控制。
4 預同步控制
對岸電與船舶進行并網操作時要確保兩者的電壓幅值、相位和頻率保持一致,否則會使得岸電與船舶發電機在切換的瞬間產生較大的沖擊電流,從而可能導致并網失敗。因此需要在控制策略中再進行改進,在進行并網操作前先加入預同步控制,從而保證二者能夠更加平滑地并網。
岸電電源與船舶電網之間的并網根據基準的不同分為2種方法[6]:一是以船舶電網為基準,調節岸電電源的相位、頻率和電壓;另一種則基準取為岸電電源側,對船舶電網的參數進行調節與之匹配。本文設計的岸電電源與船舶電網的并網方式采用以船舶電網為基準,調節岸側電源輸出與船側電網一致來達到并網要求。采用這種并網方式的原因是由于當前變頻電源的容量所限,碼頭供電方式往往采用一對一的供電方式,這種并網方式不僅可以提高并網速度和準確性,便于系統的控制,也可以降低對船舶設備的要求,極大地提高了岸電碼頭的可連接的船舶種類[7]。預同步控制的控制框圖如圖6所示。
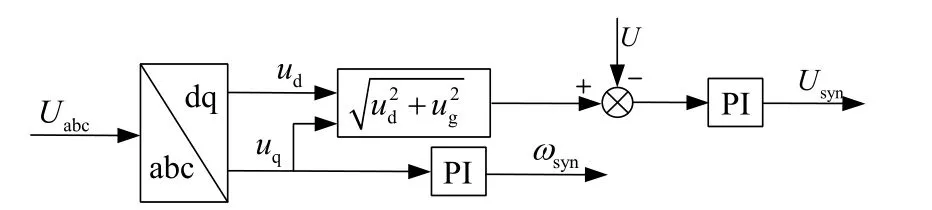
圖6 預同步控制框圖
岸電系統不斷追蹤船舶電網相位,控制系統實時檢測岸電電源與船舶電網的頻率差和相位差。當其均滿足并車條件時,啟動并車信號,閉合并車開關,實現并車運行。
5 仿真與驗證
為了驗證岸電與船舶并網時虛擬同步機技術的優越性,根據上述控制方法搭建了Simulink 仿真模型。
靠港船舶與港口岸電電源之間的連接操作分為2個部分:一是當船舶開始靠港時,船舶需要連接港口岸電電源給自身負載供電;二是當船舶離港時,靠港船舶需要斷開與岸電電源的連接,繼續使用船舶自身的發電機電力給用電設備供電[8]。本節主要對船舶靠港和離港時與岸電并離網時負荷轉移過程進行仿真研究分析,并驗證了虛擬同步機策略在船舶岸電并網時的可行性。
當船舶靠港連接岸電后,經過預同步控制調節岸電逆變器所產生的電壓頻率、幅值和相位,使其與船舶電網保持一致,當岸電與船電并網運行后,停止船用柴油發電機;當船舶離港時,開啟船用柴油發電機,當船上發電系統與岸電的電壓、頻率和相位一致時,再次使其與岸電并網,然后斷開岸電電源。
首先驗證預同步控制的可行性。圖7為岸電系統與船舶電網的線電壓。由圖7可知:岸電系統和船舶電網的初相位并不一致,經過預同步控制的調節作用,岸電電源不斷追蹤船舶電網的相位,在大約0.082 s時基本達到了兩者相位、電壓幅值和頻率的統一,在達到理想的并網操作條件時再進行并網[9],使岸電與船舶并網時的沖擊電流最小,使得兩者能夠平滑過渡。
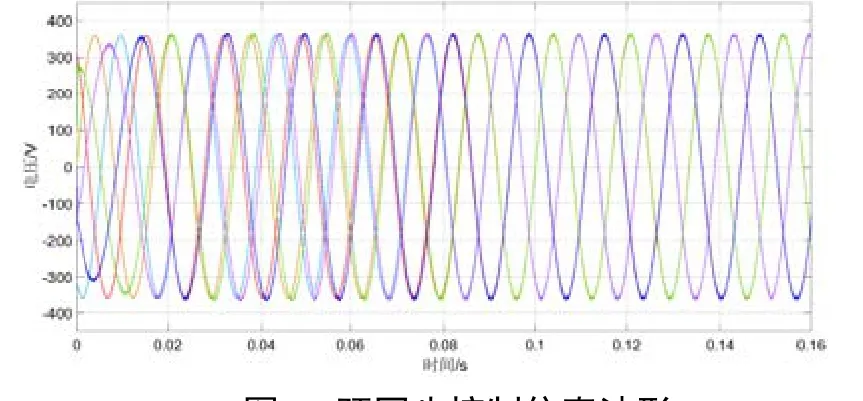
圖7 預同步控制仿真波形
在進行岸電并網操作前,岸電系統沒有接入,其輸出電流為0。在船舶靠港時,首先操作預同步,假設岸電系統在0.5 s時并網操作已確保完成,然后開始操作負荷轉移。
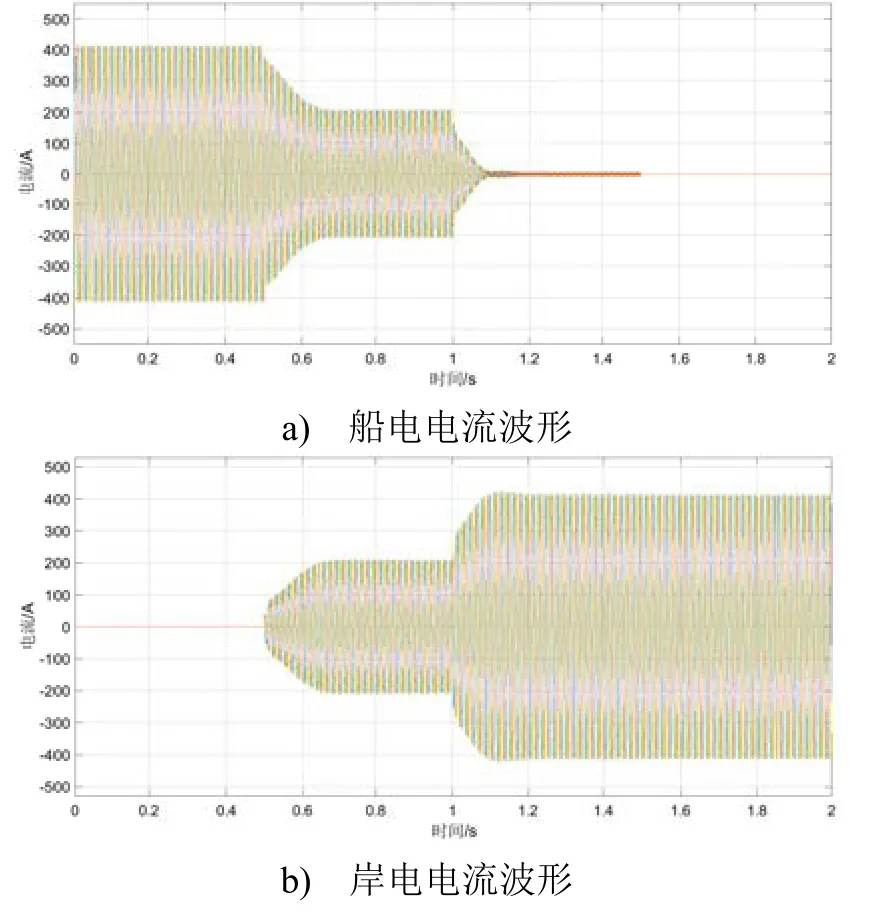
圖8 岸電并網時船舶電流和岸電電流波形圖
以有功功率為例分析,當船舶在進行負載轉移時,從圖8a)可以看出在虛擬同步發電機控制系統的作用下,船舶發電機輸出的有功功率從0.5 s起逐漸減小,相應地岸電電源輸出的有功功率逐漸增大,而總負荷在轉移過程中始終保持不變。t=1 s時表示船岸電系統已轉移了一半的負載,此時由圖可知船舶電網和岸電電源均分負載,分別為100 kW。t=1 s之后,岸電電源所發功率繼續逐漸增大,船舶電網的輸出功率逐漸減小。由圖8b)可知,大約1.5 s時船舶電流已減小至接近0,同時,船舶發電機的輸出功率也減小到至接近于0。說明當t=1.5 s已基本由岸電電源給船舶負載供電時,岸電電源與船舶電網已完成了負載轉移,此時可將船舶發動機關閉,岸電電源并網過程完成。在這過程中需要注意的是當確保負載能夠安全轉移的前提下,岸電與船電短時并聯運行的時間應控制的盡可能短。當船電與岸電并聯時,不停止船上的發電機。當確保并網操作完成時,操作負荷轉移,此時將由岸電電源承擔為船舶負載供電的任務,負荷轉移操作完成后,當柴油發電機的輸出功率減小到預定值[10],使船上的發電機并聯開關斷開,只使用岸上的電源,這個過程實現了岸電的電能替代。
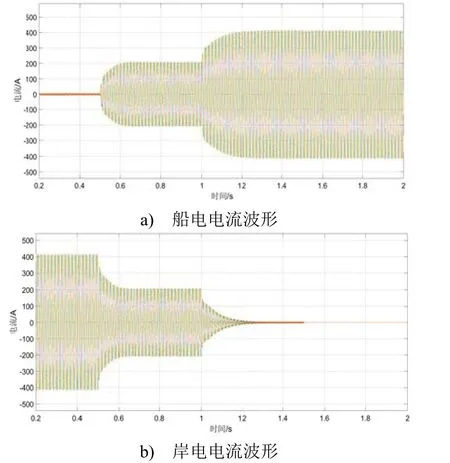
圖9 岸電離網時船舶電流和岸電電流波形圖
當船舶離港時,進行做相反的船舶離網的操作。同樣在虛擬同步發電機控制系統的作用下,岸電電源輸出的有功功率從0.5 s起逐漸減小,相應地船舶電網輸出的有功功率逐漸增大,而總負荷在轉移過程中始終保持不變。當1.5 s時,已基本實現船舶發電機為船舶電網單獨供電,岸電離網操作完成,岸電已退出連接。
搭建的船舶岸電的并離網仿真模型驗證了虛擬同步機控制策略的可行性,解決了逆變器動態響應過快的問題,使得岸電與船舶之間能夠更加平滑并網。
6 結論
本文的主要研究對象為船舶岸電系統,提出了一種基于虛擬同步機技術的船舶岸電并網控制策略。對傳統的并網技術進行了改進,在這基礎上使得岸電逆變器具備了同步發電機的外特性。通過在M atalb/Simulink平臺上對岸電系統的建模仿真,實現了岸電電源的并網控制和船舶的負載轉移,使得靠港船舶實現從船電到岸電的無縫切換,同時虛擬同步機的控制策略減小了并網時的沖擊電流和并網失敗的可能,實現了靠港船舶岸電的電能替代,對港口節能減排的目標有極大的貢獻。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
家庭影院技術(2017年9期)2017-09-26 03:41:45
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
電力工程技術(2014年1期)2014-03-20 14:19:06
