某流量控制系統(tǒng)控制策略仿真比較
2020-10-24 08:18:53楊涌周泓宇向芮玉楊福涵
科海故事博覽·上旬刊 2020年2期
關(guān)鍵詞:控制策略
楊涌 周泓宇 向芮玉 楊福涵
摘 要 在給定的流量控制系統(tǒng)中,要將其流量控制在給定值上為目的,對(duì)該系統(tǒng)進(jìn)行單回路控制方案仿真比較,討論針對(duì)該系統(tǒng)進(jìn)行P、PI、PD、PID控制仿真,研究出對(duì)應(yīng)該系統(tǒng)最適合的過(guò)程控制策略,得到各種控制策略下最好的控制指標(biāo),使用SIMULINK進(jìn)行仿真驗(yàn)證試驗(yàn)方案的可行性,從而得到滿足預(yù)期的控制效果的方案設(shè)計(jì)。
關(guān)鍵詞 流量 過(guò)程控制 控制策略 SIMULINK
中圖分類號(hào):TB11 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):1007-0745(2020)02-0014-04
1 流量控制系統(tǒng)控制策略
1.1 設(shè)計(jì)目的及意義
流量控制系統(tǒng)無(wú)論是工業(yè)生產(chǎn)還是過(guò)程控制中都有著極大的作用。一套合理高效的流量控制系統(tǒng)不但能通過(guò)管理水流量的進(jìn)出幫助工業(yè)生產(chǎn)節(jié)約巨大的成本,還能將節(jié)約的電能和水資源運(yùn)用到其他生產(chǎn)工作上面。實(shí)現(xiàn)資源的循環(huán)和低耗利用。通過(guò)對(duì)流量的實(shí)時(shí)測(cè)量計(jì)算,調(diào)節(jié)各控制環(huán)節(jié)對(duì)于生產(chǎn)過(guò)程中流量的大小,可以輕松的保證生產(chǎn)過(guò)程的安全運(yùn)行,保證產(chǎn)品的合格質(zhì)量,降低物料的使用,從而幫助企業(yè)節(jié)約生產(chǎn)成本,提高經(jīng)濟(jì)效應(yīng)。如今在食品生產(chǎn),石油提煉,冶金煉銅,新能源電力等眾多領(lǐng)域有廣泛應(yīng)用。例如對(duì)污水排放控制,水庫(kù)液位高度,溫室氣體排放,食品飲料調(diào)制都有相對(duì)應(yīng)的流量控制系統(tǒng)。本次實(shí)驗(yàn)主要是對(duì)于給定的流量控制系統(tǒng),控制其輸出值符合給定范圍。對(duì)廣義對(duì)象的傳遞函數(shù)其系統(tǒng)進(jìn)行單回路控制方案仿真比較,討論針對(duì)該系統(tǒng)進(jìn)行P、PI、PD、PID控制仿真,研究出對(duì)應(yīng)該系統(tǒng)最適合的控制策略,得到各種控制策略下最好的控制指標(biāo)并列表比較 。通過(guò)使用MATLAB的SIMULINK仿真系統(tǒng),比較幾種不同的流量控制方案,使用圖標(biāo)羅列比較幾種方案的控制效果,選擇其中最好的控制策略,通過(guò)仿真得到最佳控制系統(tǒng)并展示其效果。
1.2 國(guó)內(nèi)外發(fā)展概況
流量控制在如今許多過(guò)程工業(yè)中廣泛應(yīng)用,如石化,水電,冶金,化工,醫(yī)藥,食品等相關(guān)工業(yè)。其特點(diǎn)都是具有連續(xù)性,我國(guó)產(chǎn)品銷售大部分排名都有連續(xù)工業(yè)的特點(diǎn),可見(jiàn)流量控制在我國(guó)眾多企業(yè)中有著十分重要的意義,隨著計(jì)算機(jī)技術(shù)的出現(xiàn)和工業(yè)生產(chǎn)力的需求提高,連續(xù)工業(yè)為了向大型化,連續(xù)化,自動(dòng)化方向發(fā)展,提高自身競(jìng)爭(zhēng)能力,不斷的在自動(dòng)控制中尋求幫助來(lái)提高產(chǎn)品質(zhì)量,節(jié)約能源,降低成本。在技術(shù)方面,70年代以前主要是經(jīng)典控制理論,受限于常規(guī)儀表,而且大多數(shù)是單變量簡(jiǎn)單控制系統(tǒng)。70年代以后,計(jì)算機(jī)發(fā)展迅速,在國(guó)外發(fā)達(dá)國(guó)家過(guò)程控制自動(dòng)化普遍運(yùn)用,隨著微電子技術(shù)和通信技術(shù)的發(fā)展,自動(dòng)控制理論也在逐漸完善,計(jì)算機(jī)技術(shù)也在流量控制系統(tǒng)中占據(jù)絕對(duì)優(yōu)勢(shì),不但技術(shù)較為完善,并且成本價(jià)格也容易接受。其中核心控制算法分別隨時(shí)間發(fā)展出現(xiàn)“經(jīng)典控制理論”,“現(xiàn)代控制理論”,“智能控制理論”,具有適應(yīng)不同控制系統(tǒng)的能力。PID是較早出現(xiàn)并且十分受歡迎的控制策略,算法簡(jiǎn)單,適用性廣,實(shí)用性高。我國(guó)在水利工程計(jì)算機(jī)控制系統(tǒng)中與外國(guó)在結(jié)構(gòu)體系上差別不大,但是在運(yùn)用上缺乏管理和規(guī)范,針對(duì)不同環(huán)境還可以更細(xì)更優(yōu)更廉價(jià)。爭(zhēng)取達(dá)到方案簡(jiǎn)單使用,操作便捷靈活,成本低廉運(yùn)行可靠的優(yōu)點(diǎn)。
2 總體方案設(shè)計(jì)
2.1 各方案設(shè)計(jì)框架
如圖1所示。
2.2 流量控制系統(tǒng)的工作原理
本次設(shè)計(jì)內(nèi)容分4種方案,分別是P控制策略,PI控制策略,PD控制策略,PID控制策略。單回路控制系統(tǒng)要求被控流量和給定值流量相同,并且在SIMULINK仿真下加入擾動(dòng)的情況下根據(jù)對(duì)應(yīng)的控制傳遞函數(shù)進(jìn)行相應(yīng)的變化最終達(dá)到設(shè)定值流量。系統(tǒng)的被控對(duì)象為流量閥,通過(guò)改變其開(kāi)度控制系統(tǒng)流量。P控制的特點(diǎn)有兩點(diǎn),第一控制及時(shí),適當(dāng),只要存在偏差輸出立刻成比例變化,偏差越大輸出控制作用越強(qiáng),第二,P控制控制結(jié)果存在靜差,因此若被調(diào)量偏差為零,調(diào)節(jié)器的輸出就為零,不能做到無(wú)靜差調(diào)節(jié)。PI控制的特點(diǎn)是在P控制上加入了積分控制,I控制的特點(diǎn)是當(dāng)有偏差存在時(shí),積分輸出將隨時(shí)間增大,當(dāng)偏差消失時(shí),輸出能保持在某一值上。所以I控制具有保持功能,能夠消除殘余差,因?yàn)榉e分輸出信號(hào)隨著時(shí)間逐漸增強(qiáng),控制動(dòng)作比較緩慢,這里使用PI控制,這樣既具有P控制作用的及時(shí)快速特點(diǎn),又具有積分控制能消除余差的性能,因此有更好的控制效果。D控制也有其明顯的特點(diǎn),微分作用能超前控制,在偏差出現(xiàn)或者變化的瞬間,微分立即產(chǎn)生強(qiáng)烈的調(diào)節(jié)作用,使偏差盡快的消除在萌芽狀態(tài)中,對(duì)于慣性較大的系統(tǒng)有較好的控制作用,但是對(duì)靜態(tài)偏差毫無(wú)控制效果,因此這里組成PD控制。PD控制作用迅速且無(wú)滯后,并且能抑制動(dòng)態(tài)偏差過(guò)大的能力,但是缺乏一定的抗干擾能力,如偏差信號(hào)中含有高頻干擾,輸出就會(huì)有大幅度的變化,很容易引起執(zhí)行器的誤動(dòng)作。最后我們使用PID控制,將比例,積分,微分控制結(jié)合在一起,只要三種調(diào)節(jié)規(guī)律強(qiáng)度適當(dāng),則能快速調(diào)節(jié),并且能消除余差,得到最滿意的控制效果,在PID控制作用下,比例作用是基礎(chǔ)控制,微分作用是加快系統(tǒng)控制速度,積分作用則用于消除靜差。綜合考慮,PID控制策略為最為理想的控制策略。本次實(shí)驗(yàn)也會(huì)對(duì)上述幾種控制策略進(jìn)行仿真比較。
3 仿真設(shè)計(jì)
3.1 仿真設(shè)計(jì)原理及設(shè)計(jì)所用工具
3.1.1 仿真原理
本次仿真設(shè)計(jì)原理是利用比例控制,積分控制以及微分控制規(guī)律,對(duì)某流量控制系統(tǒng)進(jìn)行控制仿真,在某一輸入下,對(duì)已經(jīng)得到的廣義對(duì)象的傳遞函數(shù)為:
進(jìn)行單回路控制方案仿真比較,討論針對(duì)該系統(tǒng)進(jìn)行P、PI、PD、PID控制仿真,研究出對(duì)應(yīng)該系統(tǒng)最適合的控制策略,得到各種控制策略下最好的控制指標(biāo)并列表比較 ,最終展示各方案仿真效果。單流量控制系統(tǒng)的控制目的是要使被控流量與設(shè)定流量相等,并且在simulink仿真系統(tǒng)里添加擾動(dòng)的情況下根據(jù)對(duì)應(yīng)的控制傳遞函數(shù)進(jìn)行對(duì)應(yīng)的變化并最終趨近于設(shè)定流量。系統(tǒng)的被控對(duì)象為管道閥門,通過(guò)改變閥門開(kāi)度控制系統(tǒng)流量。在根據(jù)相關(guān)參數(shù)整定計(jì)算,得到相應(yīng)的數(shù)據(jù)后進(jìn)行仿真實(shí)驗(yàn),加入干擾后逐步調(diào)節(jié)數(shù)據(jù)直到出現(xiàn)滿意的效果。
3.1.2 仿真工具介紹
MATLAB可以分解為matrix和laboratory單詞的拼接,可以解釋為運(yùn)算矩陣的專業(yè)實(shí)驗(yàn)室。它是由美國(guó)的mathworks公司發(fā)布的主要面對(duì)科學(xué)計(jì)算、可視化以及交互式程序設(shè)計(jì)的高科技計(jì)算環(huán)境。主要應(yīng)用于工程計(jì)算、控制設(shè)計(jì)、信號(hào)處理與通訊等領(lǐng)域。為用戶提供了大量方便實(shí)用的處理工具。這是MATLAB的基本信息,而我們本次實(shí)驗(yàn)主要是使用其中的SIMULINK組件。
Simulink是MATLAB中的一種可視化仿真工具, 是一種基于MATLAB的框圖設(shè)計(jì)環(huán)境,是實(shí)現(xiàn)動(dòng)態(tài)系統(tǒng)建模、仿真和分析的一個(gè)軟件包,被廣泛應(yīng)用于線性系統(tǒng)、非線性系統(tǒng)、數(shù)字控制及數(shù)字信號(hào)處理的建模和仿真中。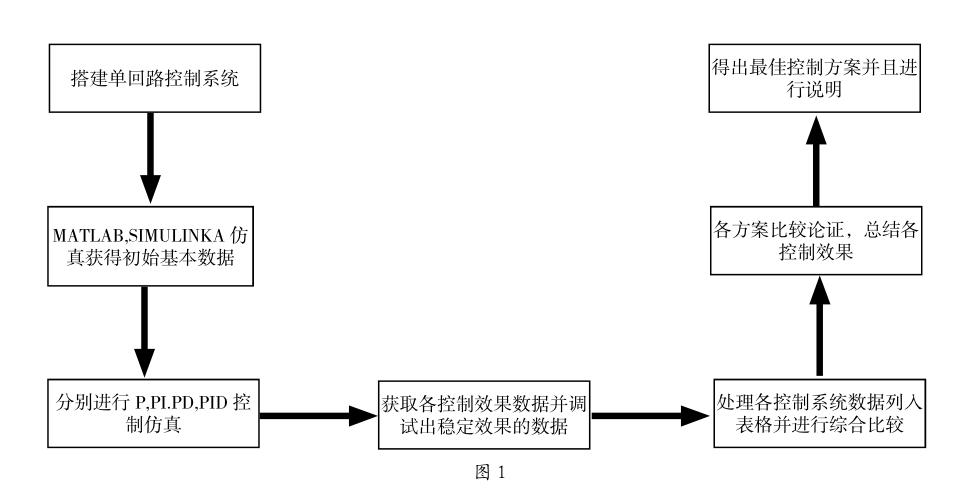
Simulink是用于動(dòng)態(tài)系統(tǒng)和嵌入式系統(tǒng)的多領(lǐng)域仿真和基于模型的設(shè)計(jì)工具。Simulink與MATLAB緊密集成,可以直接訪問(wèn)MATLAB大量的工具來(lái)進(jìn)行算法研發(fā)、仿真的分析和可視化、批處理腳本的創(chuàng)建、建模環(huán)境的定制以及信號(hào)參數(shù)和測(cè)試數(shù)據(jù)的定義。
3.2 仿真設(shè)計(jì)流程圖及說(shuō)明
3.2.1 P控制策略調(diào)試
首先我們進(jìn)行比例控制仿真調(diào)試,先構(gòu)造一個(gè)單回路控制系統(tǒng),寫入傳遞函數(shù),給一個(gè)較大的比例系數(shù)KC。
根據(jù)示波器所得數(shù)據(jù)適當(dāng)調(diào)整比例系數(shù),再根據(jù)仿真效果選擇合適的參數(shù)整定方法。選定方法后通過(guò)相關(guān)技術(shù)進(jìn)行參數(shù)整定。
3.2.2 PD控制
在沒(méi)有干擾信號(hào)加入前,我們先選擇PD控制策略進(jìn)行仿真試驗(yàn),寫入計(jì)算所得數(shù)據(jù),通過(guò)示波器顯示觀察,再結(jié)合實(shí)際情況進(jìn)行參數(shù)修改,達(dá)到滿意的比例微分控制。
3.2.3 PID控制
在得到比例微分控制過(guò)后,根據(jù)所得參數(shù)最后進(jìn)行積分調(diào)試,此時(shí)引入一定強(qiáng)度的噪音信號(hào),根據(jù)示波器顯示數(shù)據(jù)結(jié)合實(shí)際情況進(jìn)行參數(shù)調(diào)節(jié),最終完成調(diào)試,得到滿意的數(shù)據(jù)和仿真效果。
補(bǔ)充說(shuō)明:本次實(shí)驗(yàn)是基于simulink軟件進(jìn)行仿真,實(shí)驗(yàn)實(shí)際所得數(shù)據(jù)和理論計(jì)算值有一定偏差,需要在理論數(shù)據(jù)上自行使用試湊法調(diào)節(jié)相關(guān)參數(shù),參數(shù)整定方法由系統(tǒng)結(jié)構(gòu)和傳遞函數(shù)有關(guān),進(jìn)行比例調(diào)節(jié)試驗(yàn)后發(fā)現(xiàn),該系統(tǒng)振蕩較為厲害,因此采用4:1衰減曲線法,采用這種方法主要是將衰減度減小到4:1即第一個(gè)波峰和第二個(gè)波峰比值接近于4:1,然后在得出兩波峰的之間的時(shí)間差值Ts,用于計(jì)算其經(jīng)驗(yàn)公式。
衰減曲線法比較簡(jiǎn)便,適用于一般情況下的各種參數(shù)的控制系統(tǒng)。
4 系統(tǒng)調(diào)試
首先進(jìn)入SIMULINK操作頁(yè)面,將給定的廣義對(duì)象的傳遞函數(shù)帶入單回路控制系統(tǒng),正確連接所用控件接線,接入示波器后進(jìn)行仿真實(shí)驗(yàn)。
然后我們給入一個(gè)較大的比例系數(shù),使得波形盡量出現(xiàn)2個(gè)波峰左右比較合適,當(dāng)我們調(diào)試到KC=5時(shí)出現(xiàn)比較理想的波形。
由于波形中前兩個(gè)波峰之比近似為4:1,故我們采用4:1衰減曲線法整定PID參數(shù),
根據(jù)經(jīng)驗(yàn)公式和示波器數(shù)值我們可以得到:KC=5,KI=1.2,KD=0.28;我們將這些數(shù)值代入PID控制器中。
當(dāng)波形大致達(dá)到我們的預(yù)期效果,但是對(duì)于噪音信號(hào)的干擾和振蕩的波形我們可以繼續(xù)優(yōu)化,這里我們使用試湊法,經(jīng)過(guò)一系列的參數(shù)調(diào)試后,最終得到較為滿意的PID參數(shù),KC=5,KI=0.3,KD=0.5;完成對(duì)參數(shù)的整定。
5 系統(tǒng)功能、指標(biāo)參數(shù)
5.1 系統(tǒng)能實(shí)現(xiàn)的功能
本次仿真設(shè)計(jì)為一個(gè)單回路的某流量控制系統(tǒng)控制策略的仿真,本次設(shè)計(jì)的目標(biāo)要求是在給定的廣義對(duì)象的傳遞函數(shù)下使輸出流量達(dá)到設(shè)定值的標(biāo)準(zhǔn),基于傳遞函數(shù)的特點(diǎn)和單回路控制系統(tǒng),最終決定使用PID控制策略。在此控制策略下可以是滿足一般控制指標(biāo)和相應(yīng)的功能。
功能一:通過(guò)采用比例控制,使輸出控制器的輸出變化量與輸入偏差成正比,在時(shí)間上無(wú)延滯,單純?cè)陟o差,控制效果及時(shí),適當(dāng),控制作用隨著偏差的增大而增強(qiáng)。
功能二:通過(guò)采用積分控制,使控制器輸出的變化速度與偏差成正比,這樣只要偏差存在,控制器輸出就會(huì)產(chǎn)生相應(yīng)的變化,系統(tǒng)不會(huì)穩(wěn)定,只有偏差消除后,輸出信號(hào)停止變化,執(zhí)行器停止動(dòng)作,系統(tǒng)達(dá)到穩(wěn)定[1]。并且當(dāng)偏差消失時(shí),積分輸出能保持在某一數(shù)值上,因其具有保持功能,所以可以彌補(bǔ)比例控制的靜差缺點(diǎn),形成無(wú)差系統(tǒng)。但是因?yàn)槠淇刂苿?dòng)作緩慢,還需引入其他控制策略。
功能三:通過(guò)采用微分控制,使面對(duì)慣性較大的對(duì)象,能有效地加快控制速度,微分控制作用的輸出大小與偏差變化的速度成正比。如果偏差固定不變,不管偏差大小,微分控制都無(wú)法起控制作用。微分控制的功能在于它能超前控制,只要偏差一出現(xiàn)或者變化,微分作用就能立馬起效,使偏差能盡快消滅與萌芽之中。但無(wú)法對(duì)靜差起作用,需要積分控制的彌補(bǔ)。[2]
總的來(lái)說(shuō),本次仿真結(jié)合以上三個(gè)功能,將比例控制,積分控制,微分控制三種控制規(guī)律互相結(jié)合,在經(jīng)過(guò)相關(guān)參數(shù)的整定之后,可以達(dá)到快速調(diào)節(jié),消除余差,降低慣性影響的功能。在PID控制規(guī)律下,比例作用是控制的基礎(chǔ),微分作用是用于加快系統(tǒng)控制作用,積分則用來(lái)消除余差,控制質(zhì)量較高,對(duì)大部分控制系統(tǒng)都能適用。[3]
5.2 系統(tǒng)指標(biāo)參數(shù)測(cè)試
本控制系統(tǒng)一共運(yùn)用PID三個(gè)控制策略,因此我們對(duì)這三個(gè)控制策略都要進(jìn)行參數(shù)整定。
整定一:理論P(yáng)ID控制參數(shù)計(jì)算,對(duì)于該單回路控制系統(tǒng),我們首先進(jìn)行P控制,根據(jù)傳遞函數(shù)特點(diǎn)確定整定方法。首先我們?cè)O(shè)置一個(gè)較大的比例系數(shù),使示波器的輸出剛好在兩個(gè)波峰時(shí)較為理想。可以大致得到得到KC=5,這時(shí)我們發(fā)現(xiàn)兩波峰高度之比大致為4:1,因此確定參數(shù)整定的方法為4:1衰減曲線法,根據(jù)經(jīng)驗(yàn)公式和示波器顯示的相關(guān)數(shù)值,我們可以大致得到PID三個(gè)控制策略的理論參數(shù)。
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機(jī)與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測(cè)與儀表(2014年24期)2014-04-09 11:35:36
