大功率短波發(fā)射機(jī)自動(dòng)監(jiān)控系統(tǒng)抗干擾策略
2020-10-26 09:40:36劉傳欣
通信電源技術(shù) 2020年13期
劉傳欣
(廣州海格通信集團(tuán)股份有限公司,廣東 廣州510000)
1 大功率短波發(fā)射機(jī)自動(dòng)監(jiān)控系統(tǒng)干擾源
1.1 高頻電磁波干擾
大功率短波發(fā)射機(jī)的主要作用是實(shí)現(xiàn)大功率射頻信號(hào)的發(fā)射,其運(yùn)行過(guò)程中天線、發(fā)射機(jī)及饋線等部件均會(huì)產(chǎn)生強(qiáng)烈的電磁輻射,而且大電流觸點(diǎn)的開合、電子元器件的運(yùn)行、繼電器的動(dòng)作等均能產(chǎn)生瞬時(shí)電流、電壓以及電磁波等,這些電子信號(hào)和瞬間電磁波會(huì)對(duì)大功率短波發(fā)射機(jī)的自動(dòng)監(jiān)控系統(tǒng)產(chǎn)生嚴(yán)重影響,甚至導(dǎo)致其不能正常運(yùn)行。高頻電磁波是影響大功率發(fā)射機(jī)自動(dòng)監(jiān)控系統(tǒng)運(yùn)行的最主要因素[1]。
1.2 I/O接口引入的干擾
以工控機(jī)為代表的短波發(fā)射機(jī)外圍設(shè)備,均采用I/O接口進(jìn)行連接,在I/O接口使用中可能會(huì)產(chǎn)生或者引入高頻干擾信號(hào),對(duì)自動(dòng)監(jiān)控系統(tǒng)產(chǎn)生直接影響,導(dǎo)致出現(xiàn)系統(tǒng)紊亂的情況。為實(shí)現(xiàn)大功率短波發(fā)射機(jī)功能,需要模擬電路和數(shù)字電路協(xié)調(diào)配合,兩電路為避免相互影響而分開設(shè)置,數(shù)字電流通過(guò)發(fā)射機(jī)中的電阻及電感時(shí)產(chǎn)生電壓,導(dǎo)致產(chǎn)生數(shù)字噪聲。
1.3 電源系統(tǒng)引入的干擾
一般大功率短波發(fā)射機(jī)用電系統(tǒng)使用感性電阻,因此會(huì)產(chǎn)生較大電流,瞬時(shí)電壓能達(dá)到正常電壓的幾倍,也會(huì)產(chǎn)生干擾脈沖電壓。大功率短波發(fā)射機(jī)工作中會(huì)與用電系統(tǒng)協(xié)調(diào)配合,不可避免地會(huì)產(chǎn)生干擾脈沖電壓,形成干擾誤差。同時(shí),三相電路中的差模干擾和共模干擾會(huì)直接影響大功率短波發(fā)射機(jī)監(jiān)控系統(tǒng)。
2 大功率短波發(fā)射機(jī)自動(dòng)監(jiān)控系統(tǒng)抗干擾策略
2.1 屏 蔽
在大功率短波發(fā)射機(jī)自動(dòng)監(jiān)控系統(tǒng)運(yùn)行過(guò)程中,可以采用一些有效屏蔽導(dǎo)電物體的材料,通過(guò)切斷傳播途徑有效規(guī)避干擾源的不良干擾。引入干擾屏蔽材料能有效控制內(nèi)容磁場(chǎng),將產(chǎn)生的磁場(chǎng)屏蔽控制在屏蔽區(qū)域內(nèi)。大功率短波發(fā)射機(jī)的干擾源具有多樣性,因此需要采用不同的方式屏蔽干擾,包括混合屏蔽、電場(chǎng)屏蔽及磁場(chǎng)屏蔽等[2]。電磁場(chǎng)屏蔽又因頻率差異分為高頻電磁場(chǎng)屏蔽和低頻電磁場(chǎng)屏蔽,其中低頻電磁場(chǎng)屏蔽一般采用鐵或某些合金實(shí)現(xiàn),高頻電磁場(chǎng)屏蔽一般采用銅鋁等金屬材質(zhì)實(shí)現(xiàn)。在大功率短波發(fā)射機(jī)的電磁場(chǎng)屏蔽中需要綜合考慮低頻和高頻,建議采用多種金屬形成雙/層屏蔽層。
2.2 濾 波
實(shí)現(xiàn)電磁干擾消除的另一個(gè)有效途徑是濾波,濾波就是對(duì)輸入信號(hào)進(jìn)行處理和篩選,去除不符合要求的信號(hào),最終保留需求信號(hào),從而有效降低干擾。濾波消除電磁干擾具有一定的針對(duì)性,主要是針對(duì)高頻噪聲、瞬間脈沖等,濾波形式也相對(duì)多樣,可以采用多種方式實(shí)現(xiàn)濾波。因大功率短波發(fā)射機(jī)自動(dòng)監(jiān)控系統(tǒng)存在差異,對(duì)濾波要求也存在差異,在消除其電磁干擾的過(guò)程中可以在電源接口處安裝相應(yīng)裝置來(lái)消除或減弱干擾。同時(shí),大功率短波發(fā)射機(jī)為代表的精密儀器對(duì)電源要求十分嚴(yán)格,因此可以在電源中安裝相應(yīng)的濾波網(wǎng)絡(luò),用以消除高頻噪聲。
2.3 接 地
大功率短波發(fā)射機(jī)的自動(dòng)監(jiān)控系統(tǒng)一般設(shè)置在短波發(fā)射機(jī)周圍,因此其電子環(huán)境相對(duì)復(fù)雜、電子設(shè)備密集,在靜電作用下極易引發(fā)靜電干擾。如果在大功率短波發(fā)射機(jī)中引入接地措施,能有效抑制靜電干擾。大功率短波發(fā)射機(jī)自動(dòng)監(jiān)控系統(tǒng)接地實(shí)際上就是將大功率短波發(fā)射機(jī)和自動(dòng)監(jiān)控系設(shè)備進(jìn)行機(jī)殼接地。進(jìn)行機(jī)殼接地時(shí),必須合理分布匹配接地線,尤其是應(yīng)注意有效規(guī)避環(huán)路問(wèn)題[3]。在大功率短波發(fā)射機(jī)應(yīng)用中,對(duì)于發(fā)射機(jī)及其自動(dòng)監(jiān)控系統(tǒng)需要分別進(jìn)行接地處理,合理布置接地線,一般接地線使用寬銅帶。
2.4 隔 離
與屏蔽不同,隔離的主要目是通過(guò)隔離分開設(shè)備和干擾源設(shè)備,起到避免干擾和消除干擾的作用。目前,大功率短波發(fā)射機(jī)自動(dòng)監(jiān)控系統(tǒng)中使用的隔離方式主要是變壓器隔離、繼電器隔離、放大器隔離、光隔離等。繼電器隔離主要是通過(guò)電氣隔離實(shí)現(xiàn),通過(guò)電氣隔離作用于系統(tǒng)內(nèi)的2個(gè)單元,從而有效抑制系統(tǒng)中的強(qiáng)電信號(hào)和弱電信號(hào),避免其相互聯(lián)系。變壓器隔離應(yīng)用的主要目的是實(shí)現(xiàn)模擬量和電源之間的有效隔離。放大器隔離的主要目的是對(duì)放大器進(jìn)行處理,有效實(shí)現(xiàn)靜電屏蔽和電磁屏蔽。光隔離實(shí)現(xiàn)主要是利用發(fā)光元件,通過(guò)發(fā)光元件實(shí)現(xiàn)對(duì)電氣輸入和輸出的有效隔離。在大功率短波發(fā)射機(jī)電磁干擾中采用隔離措施進(jìn)行電磁防護(hù),雖然能起到一定作用,但是不能完全避免自動(dòng)監(jiān)控系統(tǒng)受到干擾,大功率短波發(fā)射機(jī)實(shí)際運(yùn)行過(guò)程中需要配合其他措施綜合實(shí)現(xiàn)電磁抗干擾。
2.5 其他抗干擾措施
隨著信息技術(shù)、互聯(lián)網(wǎng)技術(shù)的發(fā)展,還應(yīng)綜合考慮引入軟件進(jìn)行相應(yīng)的電磁干擾屏蔽,如電子狗、軟件陷阱等,以有效減少電磁信號(hào)干擾引起的錯(cuò)誤操作,保證系統(tǒng)正常運(yùn)行。以大功率短波發(fā)射機(jī)自動(dòng)監(jiān)控系統(tǒng)中應(yīng)用電子狗為例,當(dāng)系統(tǒng)程序運(yùn)行中進(jìn)入死循環(huán)后,程序會(huì)重新進(jìn)行重啟并復(fù)位,有效解決程序循環(huán)或者程序崩潰情況。
3 基于ADS-B自適應(yīng)技術(shù)的大功率短波發(fā)射機(jī)抗干擾自動(dòng)監(jiān)控系統(tǒng)設(shè)計(jì)
3.1 系統(tǒng)總體構(gòu)架
基于ADS-B自適應(yīng)技術(shù)的大功率短波發(fā)射機(jī)抗干擾自動(dòng)監(jiān)控系統(tǒng)設(shè)計(jì),是在人機(jī)交互基礎(chǔ)上進(jìn)行的。基于Visual Studio 2012進(jìn)行軟件和平臺(tái)開發(fā),最終建立相對(duì)科學(xué)、便捷、易于操作的人機(jī)交互平臺(tái),不僅能實(shí)現(xiàn)對(duì)大功率短波發(fā)射機(jī)的數(shù)據(jù)監(jiān)視和狀態(tài)監(jiān)視,而且能實(shí)現(xiàn)對(duì)其的功能控制[4]。基于ADS-B自適應(yīng)技術(shù)的大功率短波發(fā)射機(jī)抗干擾自動(dòng)監(jiān)控系統(tǒng)總體構(gòu)架如圖1所示。
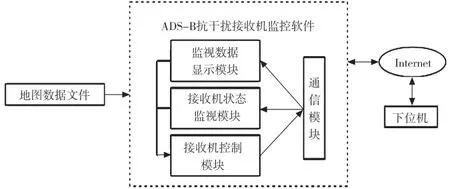
圖1 監(jiān)控系統(tǒng)總體構(gòu)架
3.2 軟件系統(tǒng)功能及實(shí)現(xiàn)
本文提出的基于ADS-B自適應(yīng)技術(shù)的大功率短波發(fā)射機(jī)抗干擾自動(dòng)監(jiān)控系統(tǒng)的監(jiān)控軟件如圖2所示,功能實(shí)現(xiàn)主要包括4大模塊,即監(jiān)視數(shù)據(jù)顯示模塊、大功率短波發(fā)射機(jī)狀態(tài)監(jiān)視模塊、應(yīng)用于人機(jī)交互的大功率短波發(fā)射機(jī)控制模塊和通信模塊。下面就各個(gè)模塊的功能實(shí)現(xiàn)進(jìn)行詳細(xì)分析。
3.2.1 監(jiān)視數(shù)據(jù)顯示模塊
監(jiān)視數(shù)據(jù)顯示模塊主要包括地圖背景實(shí)現(xiàn)和目標(biāo)航跡顯示兩個(gè)部分。地圖背景顯示是其運(yùn)行的基礎(chǔ),主要通過(guò)對(duì)大功率短波發(fā)射機(jī)環(huán)境的監(jiān)測(cè)實(shí)現(xiàn)。在程序運(yùn)行過(guò)程中,軟件和系統(tǒng)會(huì)對(duì)發(fā)射機(jī)運(yùn)行環(huán)境數(shù)據(jù)進(jìn)行加載和分析,實(shí)現(xiàn)對(duì)環(huán)境參數(shù)的分析、顯示等功能。這些功能的實(shí)現(xiàn)主要通過(guò)相關(guān)函數(shù)調(diào)用和控件實(shí)現(xiàn),同時(shí)能通過(guò)函數(shù)及控件實(shí)現(xiàn)對(duì)內(nèi)容的設(shè)置。基于ADS-B技術(shù)進(jìn)行監(jiān)控和顯示能及時(shí)、準(zhǔn)確地了解發(fā)射機(jī)的運(yùn)行情況等。
3.2.2 大功率短波發(fā)射機(jī)狀態(tài)監(jiān)視模塊
大功率短波發(fā)射機(jī)狀態(tài)監(jiān)視模塊的主要作用是通過(guò)對(duì)其運(yùn)行情況和運(yùn)行狀態(tài)的實(shí)時(shí)數(shù)據(jù)信息采集,在了解大功率短波發(fā)射機(jī)各部件和系統(tǒng)運(yùn)行情況的基礎(chǔ)上實(shí)現(xiàn)對(duì)其工作模式的監(jiān)視。大功率短波發(fā)射機(jī)運(yùn)行狀態(tài)監(jiān)視參數(shù)包括其工作溫度、工作電壓及設(shè)備運(yùn)行情況等。通過(guò)狀態(tài)監(jiān)視模塊能實(shí)現(xiàn)對(duì)其運(yùn)行風(fēng)險(xiǎn)的監(jiān)測(cè),預(yù)測(cè)并發(fā)現(xiàn)風(fēng)險(xiǎn),給出預(yù)警,從而進(jìn)行故障分析與排查。

圖2 監(jiān)控系統(tǒng)軟件模塊設(shè)計(jì)
3.2.3 大功率短波發(fā)射機(jī)控制模塊
大功率短波發(fā)射機(jī)控制模塊通過(guò)分析監(jiān)視數(shù)據(jù),在此基礎(chǔ)上下發(fā)傳送相應(yīng)的控制命令,最終實(shí)現(xiàn)對(duì)發(fā)射機(jī)的下位機(jī)等設(shè)備的控制。一般控制模塊包括中頻控制、抗干擾設(shè)置、網(wǎng)絡(luò)接口設(shè)置及基本設(shè)置等部分。首先,基本設(shè)置的主要目的是對(duì)發(fā)射機(jī)控制信息進(jìn)行設(shè)置,包括登錄密碼設(shè)置等。網(wǎng)絡(luò)接口設(shè)置主要是對(duì)發(fā)射機(jī)的網(wǎng)絡(luò)接口進(jìn)行匹配設(shè)置,尤其是本地IP地址、客戶IP地址等,以維持正常通信[5]。在大功率短波發(fā)射機(jī)的抗干擾設(shè)置中需要綜合考慮不同的干擾抑制類型,在此基礎(chǔ)上進(jìn)行數(shù)據(jù)解碼、干擾抑制。中頻控制的主要目的是實(shí)現(xiàn)對(duì)大功率短波發(fā)射機(jī)的衰減補(bǔ)償設(shè)置,還可設(shè)置本振頻率和全部通道衰減補(bǔ)償?shù)取?/p>
3.2.4 通信模塊
基于ADS-B自適應(yīng)技術(shù)的大功率短波發(fā)射機(jī)抗干擾自動(dòng)監(jiān)控系統(tǒng)的通信模塊一般引入TCP/IP協(xié)議,實(shí)現(xiàn)不同等級(jí)發(fā)射機(jī)之間的信息傳遞與傳輸。在監(jiān)控軟件運(yùn)行過(guò)程中,其不同模塊具有不同的功能和特點(diǎn),因此在傳輸協(xié)議選擇中必須綜合考慮、合理選擇。大功率短波發(fā)射機(jī)狀態(tài)監(jiān)視模塊及控制模塊中對(duì)通訊質(zhì)量有明確要求,而且一般要求較高,建議采用可靠性較高的TCP協(xié)議進(jìn)行傳輸與通信。
3.3 監(jiān)控功能設(shè)計(jì)
3.3.1 總體類型
在大功率短波發(fā)射機(jī)監(jiān)控軟件設(shè)計(jì)中,需要圍繞其功能模塊和組成進(jìn)行,包括發(fā)射機(jī)控制、工作狀態(tài)監(jiān)視、發(fā)射機(jī)數(shù)據(jù)監(jiān)視等。軟件界面設(shè)計(jì)中建議采用MFC微軟基礎(chǔ)類庫(kù),且這一過(guò)程需要考慮人機(jī)交互操作。
3.3.2 抗干擾模塊設(shè)計(jì)
本文提出的基于ADS-B自適應(yīng)技術(shù)的大功率短波發(fā)射機(jī)抗干擾自動(dòng)監(jiān)控系統(tǒng)設(shè)計(jì)的一大核心是抗干擾模塊,為實(shí)現(xiàn)其功能,必須注重抗干擾參數(shù)設(shè)置及抗干擾模式轉(zhuǎn)換等,結(jié)合大功率短波發(fā)射機(jī)的特點(diǎn)合理選擇干擾抑制措施、信號(hào)解碼通道等。本文提出的抗干擾模塊實(shí)現(xiàn)基于CAntiJamming技術(shù),CAntiJamming技術(shù)需要一些重要函數(shù)協(xié)助,包括設(shè)置更改函數(shù)InfoChange()、信息顯示函數(shù)InfoShow()等。本文基于大功率短波發(fā)射機(jī)抗干擾的特征提出了如圖3所示的抗干擾模塊運(yùn)行流程圖,在監(jiān)控軟件作用下能接收下位機(jī)的相應(yīng)監(jiān)控信息,并且對(duì)監(jiān)控信息進(jìn)行解碼了解其運(yùn)行情況,實(shí)現(xiàn)對(duì)下位機(jī)的監(jiān)視。更改功能模式時(shí),將更改數(shù)據(jù)添加到發(fā)送信息對(duì)應(yīng)表中,發(fā)送變更數(shù)據(jù)到網(wǎng)絡(luò),并啟動(dòng)下位機(jī)對(duì)應(yīng)處理程序,實(shí)現(xiàn)對(duì)干擾抑制模塊的控制。
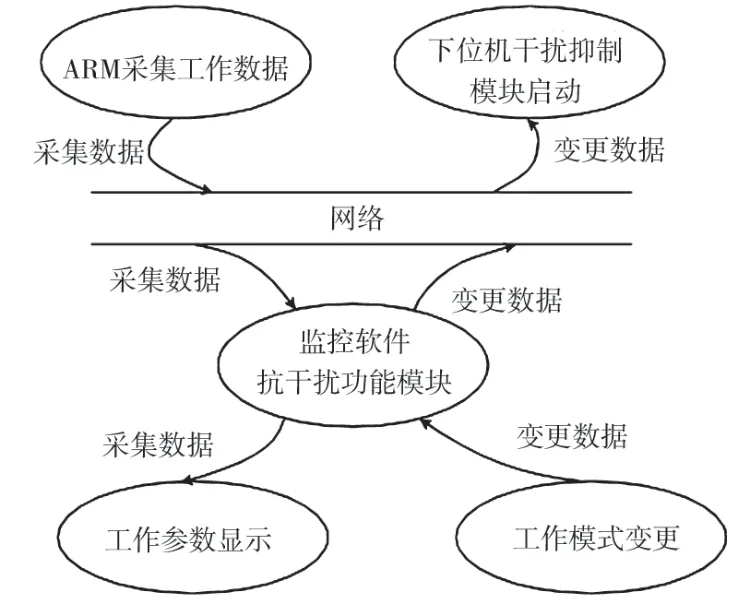
圖3 抗干擾模塊運(yùn)行流程圖
4 結(jié) 論
大功率短波發(fā)射機(jī)及其監(jiān)控系統(tǒng)運(yùn)行中會(huì)受到眾多干擾源的影響,包括輻射干擾、靜電干擾及傳導(dǎo)干擾等。為保證其正常運(yùn)行,必須綜合考慮各項(xiàng)干擾因素,針對(duì)性解決干擾問(wèn)題。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
少先隊(duì)活動(dòng)(2021年4期)2021-07-23 01:46:22
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
電子制作(2018年9期)2018-08-04 03:31:04
電子制作(2018年12期)2018-08-01 00:48:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
西部廣播電視(2015年9期)2016-01-18 03:46:07
西部廣播電視(2015年3期)2016-01-15 02:05:45
沈陽(yáng)醫(yī)學(xué)院學(xué)報(bào)(2015年1期)2015-12-27 13:44:40