基于TECNOMATIX的機(jī)器人點(diǎn)焊離線編程技術(shù)應(yīng)用
2020-10-29 07:37:05成正勇李愛冉黎亮范銳強(qiáng)
汽車科技 2020年5期
成正勇 李愛冉 黎亮 范銳強(qiáng)
摘 ?要:針對(duì)傳統(tǒng)示教編程過程繁瑣、效率低、復(fù)雜軌跡難以精確示教等不足,對(duì)TECNOMATIX離線編程技術(shù)流程和方法進(jìn)行了研究。以機(jī)器人點(diǎn)焊工位為例,應(yīng)用TECNOMATIX軟件對(duì)機(jī)器人點(diǎn)焊工位進(jìn)行虛擬環(huán)境搭建并完成了機(jī)器人路徑編輯與仿真,然后通過參數(shù)設(shè)置,應(yīng)用下載功能輸出離線程序并探究了離線程序的精度校準(zhǔn)。實(shí)踐證明,基于TECNOMATIX的離線編程較好的解決了傳統(tǒng)示教編程的不足,能夠滿足現(xiàn)場(chǎng)應(yīng)用需求。
關(guān)鍵詞:TECNOMATIX;離線編程 ;點(diǎn)焊;機(jī)器人
中圖分類號(hào):U466 U468.2 ? ?文獻(xiàn)標(biāo)識(shí)碼:B ? ?文章編號(hào):1005-2550(2020)05-0073-07
Abstract: In view of the disadvantages of traditional teaching programming, such as tedious process, low efficiency, and difficult to accurately teach complex trajectory, the technical process and method of tecnomatix off-line programming are studied. Taking the robot spot welding station as an example, the virtual environment of robot spot welding station is built by tecnomatix software with the robot path edited and simulated. Then, through parameter setting, the offline program is output by download function and the accuracy calibration of the offline program is explored. It is proved that the off-line programming based on tecnomatix can better solve the shortcomings of traditional teaching programming and meet the needs of field application.
Key Words: TECNOMATIX; Off-line Programming; Spot Welding; Robot
離線編程是機(jī)器人仿真的關(guān)鍵技術(shù)之一。隨著市場(chǎng)競(jìng)爭(zhēng)日益加劇,對(duì)生產(chǎn)周期、產(chǎn)品質(zhì)量、制造成本提出了更高要求,工業(yè)機(jī)器人在生產(chǎn)制造中開始大規(guī)模應(yīng)用,但國內(nèi)工業(yè)機(jī)器人編程卻還是主要依靠示教編程。示教編程過程繁瑣、效率低、復(fù)雜軌跡難以精確示教等不足已逐漸不能滿足生產(chǎn)制造要求[1],而離線編程技術(shù)不僅在效率上大大提升而且編程精度更高、程序修改與優(yōu)化調(diào)整更方便等諸多優(yōu)勢(shì)已逐步被重點(diǎn)關(guān)注并應(yīng)用到實(shí)際生產(chǎn)中。未來隨著人工智能、虛擬現(xiàn)實(shí)等智能制造技術(shù)的發(fā)展,離線編程技術(shù)與智能制造技術(shù)的結(jié)合應(yīng)用將更有利于機(jī)器人編程技術(shù)的發(fā)展[2]-[3]。
本文在分析TECNOMATIX軟件離線編程技術(shù)流程基礎(chǔ)之上,應(yīng)用其完成機(jī)器人點(diǎn)焊工位虛擬模型搭建和機(jī)器人路徑編輯與仿真,最后輸出離線程序并探究了離線程序的精度校準(zhǔn)。
1 ? ?TECNOMATIX離線編程技術(shù)概述
TECNOMATIX離線編程是在軟件的虛擬環(huán)境中完成建模和機(jī)器人路徑規(guī)劃與仿真分析,并應(yīng)用其離線程序模塊進(jìn)行參數(shù)配置與虛擬示教,完成后輸出機(jī)器人程序傳輸給現(xiàn)場(chǎng)機(jī)器人應(yīng)用。
1.1 ? TECNOMATIX軟件
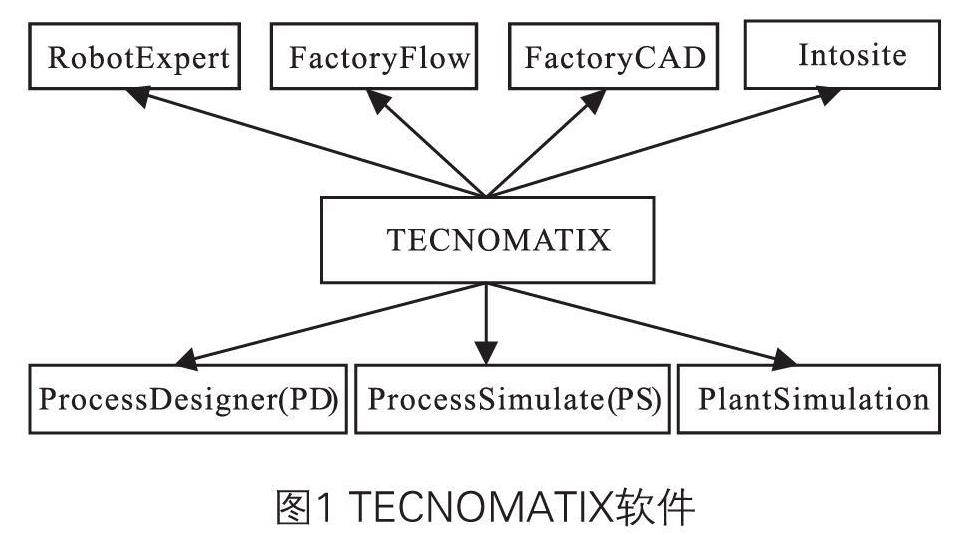
TECNOMATIX是一套大型數(shù)字化制造軟件,如圖1所示,包含ProcessDesigner(PD)、ProcessSimulate(PS)、RobotExpert、PlantSimulation、FactoryCAD、FactoryFlow和Intosite7個(gè)軟件模塊[4],其中PD、PS廣泛用于生產(chǎn)工藝設(shè)計(jì)和仿真驗(yàn)證,主要包括生產(chǎn)線規(guī)劃設(shè)計(jì)和三維布局、機(jī)器人仿真、人機(jī)仿真、離線編程等功能。本文基于PD、PS兩個(gè)軟件組合完成機(jī)器人自動(dòng)化點(diǎn)焊工位三維規(guī)劃布局與仿真,輸出機(jī)器人離線程序。
1.2 ? TECNOMATIX離線編程技術(shù)流程
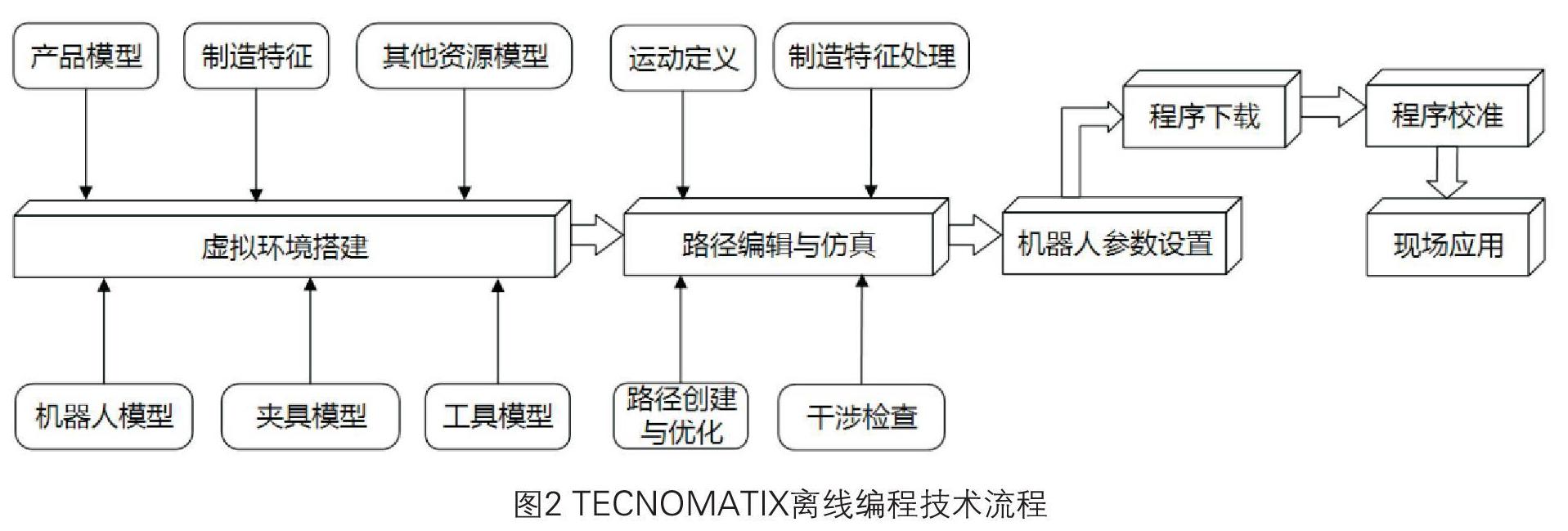
TECNOMATIX機(jī)器人離線編程的主要技術(shù)流程如圖2所示,包括虛擬環(huán)境搭建、路徑編輯與仿真、機(jī)器人參數(shù)設(shè)置、程序下載、程序校準(zhǔn)和現(xiàn)場(chǎng)應(yīng)用六個(gè)部分。
文中將結(jié)合圖2技術(shù)流程的六個(gè)方面介紹TECNOMATIX機(jī)器人離線編程的技術(shù)應(yīng)用過程。首先是在PD環(huán)境中利用產(chǎn)品模型、機(jī)器人模型、工裝設(shè)備模型和其他資源模型建立焊接工位三維布局規(guī)劃,然后在PS環(huán)境中進(jìn)行路徑規(guī)劃與仿真、參數(shù)設(shè)置和程序輸出,最后結(jié)合現(xiàn)場(chǎng)對(duì)離線程序誤差進(jìn)行校準(zhǔn),把校準(zhǔn)后的程序應(yīng)用到現(xiàn)場(chǎng)。
2 ? ?TECNOMATIX離線編程技術(shù)應(yīng)用
2.1 ? 虛擬環(huán)境搭建
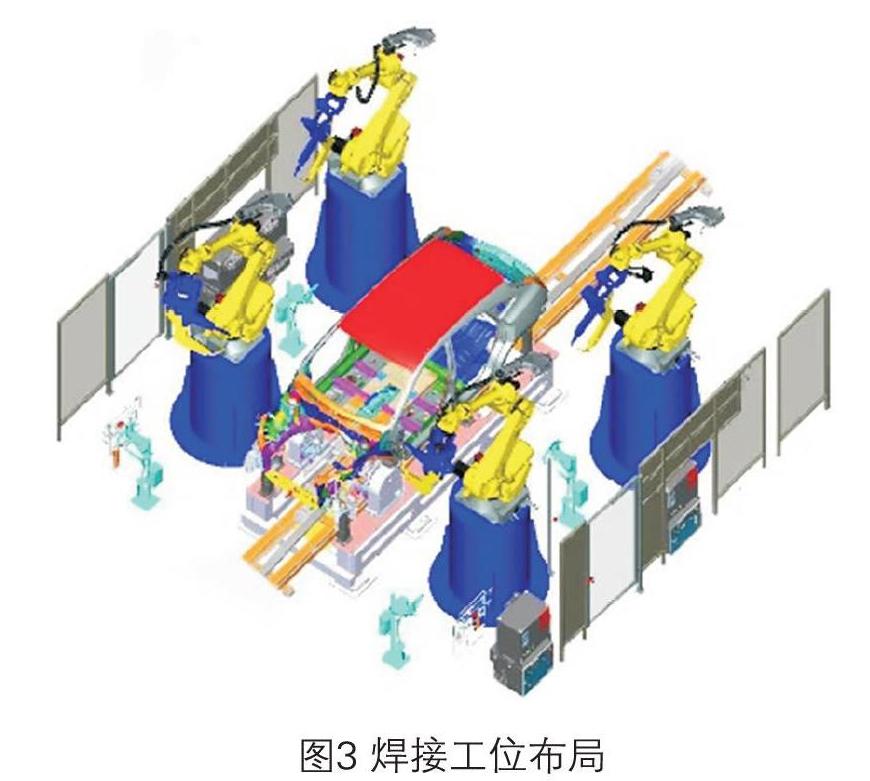
PD虛擬環(huán)境搭建所需要的數(shù)據(jù)主要有產(chǎn)品數(shù)據(jù)、工裝設(shè)備數(shù)據(jù)和焊點(diǎn)數(shù)據(jù)等,但PD自身的三維建模功能較弱,所需數(shù)據(jù)一般均由外部導(dǎo)入。由于軟件是采用數(shù)據(jù)庫的形式管理所有數(shù)據(jù),所以不同的數(shù)據(jù)導(dǎo)入方式也不盡相同。首先需要在外部CAD軟件中完成建模,然后轉(zhuǎn)換為PD軟件不同導(dǎo)入方式所對(duì)應(yīng)的文件格式。產(chǎn)品數(shù)據(jù)和工裝設(shè)備數(shù)據(jù)采用CADTranslator(PD數(shù)據(jù)轉(zhuǎn)換工具)轉(zhuǎn)換為CO格式導(dǎo)入PD軟件,不同的是工裝設(shè)備數(shù)據(jù)要采用建立資源庫的方式導(dǎo)入。焊點(diǎn)數(shù)據(jù)的導(dǎo)入則要應(yīng)用二次開發(fā)的CAD焊點(diǎn)導(dǎo)出工具導(dǎo)出為CSV格式,再導(dǎo)入PD軟件。數(shù)據(jù)創(chuàng)建完成后,應(yīng)用鼠標(biāo)拖動(dòng)和Placement Manipulator、Relocate兩個(gè)主要布局工具的配合,即可完成模型的精確布局。完成后的焊接工位布局如圖3所示:
2.2 ? 機(jī)器人路徑編輯與仿真
TECNOMATIX的PD、PS兩個(gè)軟件模塊是高度集成的,在PD中建立仿真節(jié)點(diǎn),拖入需要仿真的數(shù)據(jù)選擇用PS打開進(jìn)行機(jī)器人的路徑編輯與仿真。PS中主要是對(duì)設(shè)備的運(yùn)動(dòng)學(xué)進(jìn)行仿真,在路徑編輯和仿真之前,需要對(duì)運(yùn)動(dòng)的設(shè)備進(jìn)行機(jī)構(gòu)定義。PS定義機(jī)構(gòu)運(yùn)動(dòng)關(guān)系的工具是Kinematics Editor,通過創(chuàng)建Link的形式把設(shè)備分為若干運(yùn)動(dòng)部件和固定部件的Link塊,并定義各Link塊之間的運(yùn)動(dòng)關(guān)系。由于每個(gè)設(shè)備運(yùn)動(dòng)有多個(gè)狀態(tài),在完成各Link塊之間的運(yùn)動(dòng)關(guān)系定義后還需要應(yīng)用Pose Editor工具對(duì)設(shè)備各狀態(tài)進(jìn)行定義,通常焊鉗定義為HOME、OPEN、CLOSE、SEMIOPEN四個(gè)狀態(tài),夾頭定義為HOME、OPEN、CLOSE三個(gè)狀態(tài)。此外焊鉗還要定義工作中心點(diǎn)TCP坐標(biāo),位于靜臂電極帽中心處,Z向由靜臂指向動(dòng)臂,X向背離焊鉗體。機(jī)器人一般廠家定義好了運(yùn)動(dòng)關(guān)系,PS中不需要再次定義。如果后期要進(jìn)行PLC虛擬調(diào)試,還需要對(duì)設(shè)備的邏輯及信號(hào)進(jìn)行定義[5]。
在路徑編輯和仿真之前,還需要對(duì)焊點(diǎn)進(jìn)行處理,焊點(diǎn)的處理包括焊點(diǎn)投影和焊點(diǎn)焊接姿態(tài)的調(diào)整。在PS中焊點(diǎn)是投影成坐標(biāo)進(jìn)行仿真,投影生成的焊點(diǎn)坐標(biāo)包括位置和方向,位置位于距離所選擇的投影鈑金件最近的一個(gè)面上,Z向與投影面的法向一致,X向?yàn)楹搞Q進(jìn)入板件焊接的方向,如圖4a為某一焊點(diǎn)的投影結(jié)果,長(zhǎng)虛線表示Z向,長(zhǎng)實(shí)線表示X向,短實(shí)線表示Y向,圖4b為工位全部焊點(diǎn)的投影結(jié)果。在焊接仿真時(shí)焊鉗的TCP坐標(biāo)與焊點(diǎn)投影坐標(biāo)重合模擬焊點(diǎn)焊接,調(diào)整焊點(diǎn)焊接姿態(tài)就是調(diào)整焊點(diǎn)坐標(biāo)的方向,使焊接過程不發(fā)生干涉且焊鉗姿態(tài)最佳。PS中調(diào)整焊點(diǎn)焊接姿態(tài)有三種方式,第一種是Location Manipulation,用此方式調(diào)整時(shí)要選擇焊鉗跟隨模式,以便實(shí)時(shí)觀察焊鉗姿態(tài)及干涉情況,并且還可以調(diào)整Z方向允許傾斜的角度(各公司標(biāo)準(zhǔn)不一樣);第二種是Pie Chart,用此種方式調(diào)整時(shí),在餅狀圖上可直觀的看到焊鉗是否可達(dá)及其干涉情況,可非常方便的調(diào)整餅狀圖上的指針到藍(lán)色區(qū)域(不干涉區(qū)域);第三種方式是Automatic Approach Angle,可自動(dòng)調(diào)整焊點(diǎn)焊接姿態(tài)到非干涉區(qū)域。
機(jī)器人運(yùn)動(dòng)路徑創(chuàng)建其實(shí)就是創(chuàng)建焊鉗TCP 走過的路徑點(diǎn)和定義焊點(diǎn)焊接順序。優(yōu)良的運(yùn)動(dòng)路徑是機(jī)器人工作過程不產(chǎn)生干涉、運(yùn)動(dòng)路徑短、姿態(tài)良好且切換過程平穩(wěn),兩個(gè)路徑點(diǎn)之間不產(chǎn)生奇異點(diǎn)及路徑點(diǎn)盡量少[6]。PS中創(chuàng)建路徑非常方面,用Robot Jog工具直接手動(dòng)拖動(dòng)或沿坐標(biāo)軸精確移動(dòng)與旋轉(zhuǎn)機(jī)器人TCP到所需創(chuàng)建路徑點(diǎn)位置,然后在路徑規(guī)劃菜單(Path)中完成對(duì)路徑點(diǎn)的添加、刪除等操作和分析,其中Automatic Path Planner工具可以根據(jù)機(jī)器人工作任務(wù)實(shí)現(xiàn)自動(dòng)生成路徑,但只能自動(dòng)生成一些相對(duì)簡(jiǎn)單的路徑,復(fù)雜路徑的生成效果較差。此外焊點(diǎn)投影完后的默認(rèn)焊接順序一般不能滿足要求,需要結(jié)合工藝要求、機(jī)器人間的配合、焊接路徑規(guī)劃、焊接姿態(tài)切換等多個(gè)因素重新調(diào)整焊接順序。
在創(chuàng)建路徑的過程中還需要對(duì)點(diǎn)的屬性進(jìn)行定義,包括路徑點(diǎn)和焊點(diǎn),兩者有所不同,焊點(diǎn)包括焊接參數(shù)屬性。點(diǎn)的屬性定義是TECNOMATIX 離線編程中非常重要的一個(gè)部分,只有準(zhǔn)確的定義各點(diǎn)屬性,保證與實(shí)際工作情況一致,離線編程才能真正的應(yīng)用到現(xiàn)場(chǎng)中去。屬性定義與實(shí)際機(jī)器人的各種指令和設(shè)置基本一致。PS中屬性主要包括運(yùn)動(dòng)屬性、工具屬性、工藝屬性、OLP屬性和其他屬性等類型。屬性定義的工具有3個(gè),第一個(gè)是路徑編輯工具(Path Editor),第二個(gè)是點(diǎn)屬性工具(Set Locations Properties),第三個(gè)是虛擬示教器工具(Teach Pendant)。這三個(gè)設(shè)置屬性的工具有所不同,點(diǎn)屬性工具可以對(duì)所有的通用屬性進(jìn)行設(shè)置,而且可以篩選點(diǎn)的類型(例如焊點(diǎn)、經(jīng)過點(diǎn)等),對(duì)不同類型的點(diǎn)篩選后統(tǒng)一設(shè)置;虛擬示教器工具中的屬性除了OLP屬性外,其余屬性均可以在點(diǎn)屬性工具中設(shè)置,一次只能示教設(shè)置一個(gè)點(diǎn),并且機(jī)器人會(huì)示教到當(dāng)前點(diǎn)的姿態(tài);路徑編輯窗口主要用于仿真過程中的屬性展示,可以修改部分屬性值。
路徑創(chuàng)建與定義完成后,可以應(yīng)用干涉仿真檢查,驗(yàn)證工作過程是否存在干涉。仿真之前,需要先對(duì)干涉選項(xiàng)和干涉條件進(jìn)行設(shè)置,軟件提供非常直觀的顏色顯示,不僅可以檢查碰撞干涉,還可以對(duì)間隙和接觸進(jìn)行檢查。如圖5所示,干涉選項(xiàng)中設(shè)置間隙距離為5mm,接觸顏色為橙色,允許碰撞值為0mm,即表示當(dāng)兩個(gè)物體距離為大于0mm小于等于5mm時(shí),黃色顯示;當(dāng)兩個(gè)物體距離為0mm接觸時(shí),橙色顯示;當(dāng)兩個(gè)物體距離小于0mm碰撞,紅色顯示。干涉條件設(shè)置如圖6所示,除了要設(shè)置機(jī)器人、焊鉗與夾具、產(chǎn)品間的干涉,還要設(shè)置各機(jī)器人間和各焊鉗間的干涉。激活干涉檢查條件,仿真過程中如果出現(xiàn)碰撞,兩個(gè)碰撞的物體會(huì)以紅色顯示,發(fā)出報(bào)警聲,并停止仿真。此時(shí)一般可以通過調(diào)整路徑點(diǎn)位置和姿態(tài)、調(diào)整運(yùn)動(dòng)方式或增加路徑點(diǎn)來避免干涉,如果無論怎么調(diào)整,干涉都無法避免,需要向設(shè)計(jì)提出修改意見。
2.3 ? 程序輸出
2.3.1 機(jī)器人參數(shù)設(shè)置
TECNOMATIX輸出離線程序需要2個(gè)主要模塊,一個(gè)是西門子TECNOMATIX下的OLP程序文件,另一個(gè)是機(jī)器人生產(chǎn)廠家提供的RCS虛擬控制器文件。OLP和RCS安裝完成后,在機(jī)器人屬性中選擇對(duì)應(yīng)的控制器及控制器版本,打開機(jī)器人參數(shù)設(shè)置窗口,設(shè)置機(jī)器人的參數(shù)。不同品牌、不同類型、不同控制器版本的機(jī)器人參數(shù)設(shè)置界面略有不同。如圖7所示,以FANUC常用的點(diǎn)焊機(jī)器人R-2000iB/210F(控制器版本V8.30)為例,說明了機(jī)器人參數(shù)設(shè)置的各項(xiàng)含義。其中需要設(shè)置的參數(shù)主要包括下載設(shè)置、機(jī)器人及焊鉗設(shè)置、坐標(biāo)系設(shè)置、負(fù)載設(shè)置和程序模板選擇5項(xiàng)參數(shù)。在下載設(shè)置中設(shè)置輸出程序的描述方式,在機(jī)器人及焊鉗設(shè)置中設(shè)置機(jī)器人設(shè)備編號(hào)及選擇攜帶的焊鉗,在坐標(biāo)系設(shè)置中選擇工具坐標(biāo)系和用戶坐標(biāo)系,在負(fù)載設(shè)置中設(shè)置負(fù)載焊鉗的重心和轉(zhuǎn)動(dòng)慣量參數(shù),在程序模板項(xiàng)選擇輸出程序的文件格式。
2.3.2 ? 程序下載
機(jī)器人程序下載即生成一個(gè)機(jī)器人程序文件。TECNOMATIX機(jī)器人程序下載有兩種方式,一種是直接把機(jī)器人路徑操作加載到路徑編輯窗口(Path Editor)中,然后通過下載工具(Download to Robot)下載程序,如圖8a所示,此種方式一次只能完成機(jī)器人的一個(gè)路徑操作下載,如果下載機(jī)器人的多個(gè)路徑操作則需要多次操作,且下載的程序文件是分開的。另一種方式是首先通過機(jī)器人程序目錄(Robotic Program Inventory)創(chuàng)建程序,并把創(chuàng)建的程序加載到路徑編輯窗口(Path Editor)中進(jìn)行編輯,然后把多個(gè)機(jī)器人路徑操作添加到機(jī)器人程序中,最后利用程序下載工具(Download to Robot)下載程序,如圖8b所示,此種方式一次可以下載一個(gè)機(jī)器人的多個(gè)路徑操作,并且只會(huì)生成一個(gè)程序文件,可保證程序的連續(xù)性。
不同品牌機(jī)器人輸出的程序格式并不一樣,輸出后的程序還要轉(zhuǎn)換為現(xiàn)場(chǎng)機(jī)器人可識(shí)別的程序語言,例如FANUC機(jī)器人輸出的程序格式為*.ls格式,由于現(xiàn)場(chǎng)機(jī)器人可識(shí)別的語言程序?yàn)?.TP格式,因此還要把*.ls格式轉(zhuǎn)換為*.TP格式。
2.4 ? 精度校準(zhǔn)
離線程序應(yīng)用到現(xiàn)場(chǎng)機(jī)器人中存在的最大問題就是精度校準(zhǔn)。影響程序精度的因素主要有兩個(gè)方面,一方面是加工制造誤差,包括機(jī)器人本體加工制作誤差、夾具加工制造誤差和工具加工制造誤差,另一方面是安裝誤差,包括機(jī)器人與夾具安裝的相對(duì)位置誤差和工具安裝誤差。相對(duì)于安裝誤差,加工制造誤差一般較小,可以忽略不計(jì),因此在實(shí)際工作中主要是對(duì)程序進(jìn)行安裝誤差的校準(zhǔn)。
2.4.1 焊鉗TCP校準(zhǔn)
由于安裝誤差,在仿真環(huán)境中建立的焊鉗TCP坐標(biāo)實(shí)際中可能并不在電極帽端面中心,現(xiàn)場(chǎng)仍需對(duì)其進(jìn)行校準(zhǔn)。為了提高校準(zhǔn)精度,可采用一些輔助工具,例如特制的尖頭電極帽和尖頭測(cè)量桿[7]。機(jī)器人自帶TCP校準(zhǔn)模塊,例如FANUC機(jī)器人采用6點(diǎn)校準(zhǔn)法,其中3點(diǎn)校準(zhǔn)TCP位置,另外3點(diǎn)校準(zhǔn)TCP方向。如圖9所示,校準(zhǔn)時(shí)尖頭電極帽以3種不同的姿態(tài)對(duì)齊尖頭測(cè)量桿,記錄TCP位置,以第4種姿態(tài)對(duì)齊測(cè)量桿,記錄方向原點(diǎn),再從方向原點(diǎn)沿+X和+Z方向移動(dòng)至少250mm,分別記錄TCP的X向和Z向。
2.4.2 機(jī)器人與夾具相對(duì)位置校準(zhǔn)
現(xiàn)場(chǎng)機(jī)器人與夾具的安裝位置及安裝角度并不能100%達(dá)到設(shè)計(jì)狀態(tài),稍有偏差都會(huì)導(dǎo)致現(xiàn)場(chǎng)與虛擬環(huán)境不一致,需要根據(jù)現(xiàn)場(chǎng)校準(zhǔn)虛擬環(huán)境,使虛擬與現(xiàn)場(chǎng)保持一致,或者對(duì)離線程序進(jìn)行偏移補(bǔ)償,以滿足現(xiàn)場(chǎng)應(yīng)用。
機(jī)器人與夾具的相對(duì)位置誤差,一直是行業(yè)內(nèi)研究的重點(diǎn)。陳文剛在《論焊裝數(shù)字化工廠的點(diǎn)焊機(jī)器人離線程序精度提升》中研究了現(xiàn)場(chǎng)測(cè)量法,測(cè)量計(jì)算出現(xiàn)場(chǎng)機(jī)器人與夾具的相對(duì)位置,再依據(jù)此值調(diào)整虛擬環(huán)境中的機(jī)器位置[8]。胡婷在《機(jī)器人離線編程誤差校準(zhǔn)》中研究了用戶坐標(biāo)系校準(zhǔn)法,在虛擬環(huán)境中建立一個(gè)用戶坐標(biāo)系,將離線程序轉(zhuǎn)化為關(guān)于用戶坐標(biāo)系的相對(duì)程序,再在現(xiàn)場(chǎng)測(cè)量出用戶坐標(biāo)系,將之前的相對(duì)程序再轉(zhuǎn)換成關(guān)于現(xiàn)場(chǎng)用戶坐標(biāo)系的相對(duì)程序[9]。蔡江等人在《一種用于機(jī)器人離線編程的標(biāo)定方法》中研究了工具坐標(biāo)系擬合校準(zhǔn)法,現(xiàn)場(chǎng)采集便于建立工具坐標(biāo)系的3個(gè)點(diǎn),分別測(cè)量出其在機(jī)器人基坐標(biāo)和車身坐標(biāo)系中的值,然后根據(jù)測(cè)量值在虛擬環(huán)境中建立兩個(gè)工具坐標(biāo)系,并使其重合,以此來校準(zhǔn)機(jī)器人與夾具相對(duì)位置[10]。以上方式均需要用測(cè)量設(shè)備在現(xiàn)場(chǎng)進(jìn)行精確的測(cè)量,TECNOMATIX軟件采用的是多點(diǎn)擬合校準(zhǔn)法(至少需要3個(gè)不共線的點(diǎn),建議10點(diǎn)以上),如圖10所示,利用機(jī)器人自身進(jìn)行測(cè)量,其過程是在虛擬環(huán)境中的夾具上標(biāo)記出至少3個(gè)測(cè)量點(diǎn),在生產(chǎn)現(xiàn)場(chǎng)夾具上同樣標(biāo)記出與虛擬環(huán)境中一樣的點(diǎn),示教機(jī)器人到這些點(diǎn)位進(jìn)行編程,然后把點(diǎn)位示教程序上傳到虛擬環(huán)境中,與虛擬環(huán)境中的點(diǎn)形成校準(zhǔn)點(diǎn)對(duì),再利用軟件自動(dòng)計(jì)算(calibration)出現(xiàn)場(chǎng)機(jī)器人的位置誤差。軟件具有自動(dòng)調(diào)整功能,計(jì)算完成后可以根據(jù)誤差自動(dòng)調(diào)整虛擬機(jī)器人位置,使其與現(xiàn)場(chǎng)保持一致。機(jī)器人位置校準(zhǔn)完成后,輸出的離線程序便可直接應(yīng)用到現(xiàn)場(chǎng)中。
3 ? ?結(jié)論
在汽車焊裝生產(chǎn)中,應(yīng)用TECNOMATIX軟件對(duì)機(jī)器人點(diǎn)焊工位進(jìn)行虛擬建模與仿真,然后輸出離線程序,并對(duì)離線程序進(jìn)行校準(zhǔn),校準(zhǔn)后的離線程序可直接應(yīng)用到生產(chǎn)現(xiàn)場(chǎng)調(diào)試中。結(jié)果表明,TECNOMATIX機(jī)器人點(diǎn)焊離線編程具有實(shí)用性,并且可以推廣應(yīng)用到機(jī)器人弧焊、機(jī)器人涂膠等其他自動(dòng)化生產(chǎn)中。TECNOMATIX離線編程相較于傳統(tǒng)示教編程具有以下優(yōu)勢(shì)。
a. 不占用現(xiàn)場(chǎng)機(jī)器人工作時(shí)間,效率大大提升;
b. 方便規(guī)劃更加復(fù)雜的軌跡,編程精度高;
c. 程序優(yōu)化修改與調(diào)試更方便,對(duì)編程結(jié)果的觀察更直觀;
d. 遠(yuǎn)離危險(xiǎn)的工作環(huán)境,更安全;
e. 可對(duì)各種機(jī)器人進(jìn)行編程,系統(tǒng)使用范圍廣;
f. 可結(jié)合人工智能、虛擬現(xiàn)實(shí)等技術(shù)改善離線編程,使其更高效、直觀;
g. 系統(tǒng)中可對(duì)多機(jī)器人并聯(lián)編程與仿真;
h. 提前識(shí)別問題,降低生產(chǎn)準(zhǔn)備投資,縮短生產(chǎn)準(zhǔn)備時(shí)間。
參考文獻(xiàn):
[1]介黨陽,寇萌,胡昭琳等. 機(jī)器人離線編程技術(shù)現(xiàn)狀及前景展望[J].裝備機(jī)械,2017(3):54-55.
[2]于亞樓. 基于人工智能的計(jì)算機(jī)離線編程系統(tǒng)開發(fā)研究[J]. 數(shù)字化技術(shù)與應(yīng)用,2019,37(7):177-178.
[3]鐘元權(quán),張?jiān)I? 基于VR技術(shù)的機(jī)器人離線編程技術(shù)研究[J]. 山東農(nóng)業(yè)工程學(xué)院學(xué)報(bào),2019,36(5):36-40.
[4]Siemens Digital Industries Software.Tecnomatix [EB/OL].https://www.plm.automation.siemens.com/global/zh/products/Tecnomatix/,2020-1-4.
[5]成正勇,黎亮,李小燦等. 基于TIA與TECNOMATIX 的聯(lián)合虛擬調(diào)試研究[J]. 汽車工藝與材料,2020(2):66-71.
[6]凌偉竣,農(nóng)民滿,農(nóng)勝夫. 基于Robotcad的機(jī)器人滾邊仿真研究[J]. 汽車工藝與材料,2020(2):3-4.
[7]武保同,呂朋,于鮮. 基于Robotcad點(diǎn)焊機(jī)器人離線編程技術(shù)應(yīng)用[J]. 汽車工業(yè)研究,2018(1):25-26.
[8]陳文剛. 論焊裝數(shù)字化工廠的點(diǎn)焊機(jī)器人離線程序精度提升[J]. 裝備制造技術(shù),2019(7):183-185.
[9]胡婷. 機(jī)器人離線編程誤差校準(zhǔn)[J].電焊機(jī),2015,45(12):51-52.
[10]蔡江,劉歡. 一種用于機(jī)器人離線編程的標(biāo)定方法[J]. 機(jī)電信息,2017(9):108-109.
