船舶動力定位控制策略研究綜述
2020-10-31 04:19:50廖成毅吉宇人
艦船科學技術 2020年9期
廖成毅,楊 穎,吉宇人
(中國船舶及海洋工程設計研究院,上海 200011)
0 引 言
近年來,人類在生存、發展及國家安全方面對海洋需求的日益增加,專業性極強的海洋工程作業平臺不斷涌現,頗具代表性的平臺有:鋪纜船,用于海底光纜(軍用/民用)鋪設和維護檢修;打撈船,用于失事船舶、人員的打撈、救援;海上發射平臺,用于導彈、運載火箭發射;海洋石油鉆井平臺,用于石油開采;科考船,用于海洋資源、地質勘探等。這類船舶需實現定點作業或者跟隨預設航跡作業,為此動力定位(DP)系統應運而生。船舶DP系統主要功能是在船舶受到外界風浪流影響作用下,由控制模塊生成控制指令,控制動力系統產生相應推力來實現船舶定點控位和航跡跟蹤[1-3]。系統由測量系統、控制系統、電力推進系統和舵槳裝置組成,其中控制系統最為核心,負責系統模型計算、控制策略選擇、傳感器數據融合等任務,而船舶DP系統是復雜的非線性系統,具有干擾不確定性、模型參數不確定性、狀態變量測量噪聲、執行機構受限等特點,因此其控制策略設計及應用研究是當今控制理論與應用領域的重要方向之一。
2011年Sorensen從DP系統數學模型、觀測器控制器、推力分配等方面較系統地分析總結了近30年來用于DP控制系統的控制技術的發展情況[1]。近十年來,先進控制技術在DP控制系統設計領域取得較多成果,本文圍繞DP系統核心控制策略,概括總結船舶DP系統的控制策略最新發展情況,并分析各種控制策略存在的優缺點,結合船舶DP系統的使命任務多樣化,重點提出了DP系統控制策略的發展目標,以及下一步重點研究方向。
1 動力定位系統控制模型
DP系統經典控制模型為Fossen提出的六自由度模型[4]:
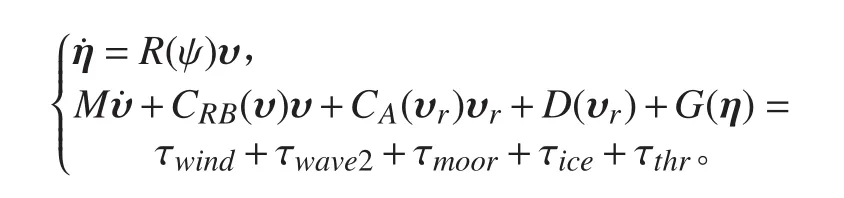

2 動力定位系統控制策略
DP控制策略經歷了從經典的由低通濾波和PID控制結合的第1代過渡到以Kalman濾波和最優控制結合的第2代DP控制策略,并逐漸發展為以智能控制技術為基礎的第3代DP控制策略。
2.1 基于PID算法的DP控制策略
PID原理簡單,易于工程應用,且魯棒性強,適用于環境惡劣的工業控制過程,常用DP控制策略表達式為:

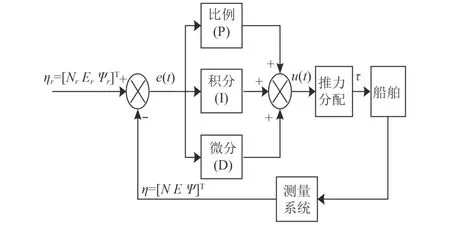
圖1 動力定位PID控制策略原理圖Fig. 1 The Schematic diagram of PID control strategy for dynamic positioning model
考慮船舶存在對定位時間要求不高且控制過程中有異常外力影響系統的情況,Svenn[7]設計了一種基于PID的混合控制方法,當誤差較大時,控制器中積分部分采用大數值作為調節參數,當接近期望值時,控制器切換為常規PID進行調節。直翼推進器響應速度足夠高,可以保證定位的高精度、實時性,Philipp[8]針對配置直翼推進器的DP船舶設計PID控制器,并通過試驗進行驗證。作為未來船舶作業重點考慮的條件之一,極限海況的研究成果較少,Ole[9]將PID和滑模變結構策略設計的2種DP控制器進行了分析對比,結果表明基于滑模變結構的DP控制器在極限海況下更加有效。當船舶建模時考慮外界干擾頻率差別如高頻波浪力和低頻海流漂移力,以及不同干擾的頻率特性差異如風、冰載荷情況,傳統PID控制將無法滿足要求。為此,Awantha[10]提出一種基于小波多分辨率的PID控制策略,通過離散小波變化方法將位置誤差和艏向誤差分解成不同頻率的組成部分,對各個部分分別設計PID控制器。為提高在環境干擾力影響下的船舶DP系統的精確性和穩定性,孫蓓蓓[11]建立了以動力模型和環境干擾模型為基礎的動力定位數學模型,基于此提出模糊PID控制模型,并通過仿真進行分析驗證。
由于PID控制策略只能針對線性系統,同時要求模型精確已知,因此,當被控系統為模型參數未知的線性系統,以及控制精度要求高的非線性系統,該方法將不再適用。
2.2 基于模糊/神經網絡自適應算法的DP控制策略
模糊邏輯系統(Fuzzy Logic Systems,FLS)與神經網絡(Neural Network,NN)由于其特有的萬能逼近特性,為解決復雜系統模型不確定性問題開辟了新的途徑。將FLS或者NN的萬能逼近特性與自適應控制方法的在線學習能力結合起來,可以保證被控系統在外界環境或系統本身發生變化情況下仍具有良好的控制性能[11-12]。船舶在航行作業過程中,受波浪、海流等外力作用影響船體會產生變形,事實上船舶DP控制系統為極其復雜的非線性模型,要實現高精度的動力定位能力,需要建立精確的數學模型,但是通常情況下船舶DP系統的精確數學模型卻很難建立,因此,基于FLS/NN自適應控制策略為DP系統存在的上述問題提供了解決思路。以文獻[6]為例,控制策略表達式為:

國內杜佳璐教授團隊采用FLS/NN自適應控制方法,取得較多研究成果。文獻[5]中針對存在外界干擾未知、參數不確定的系統提出魯棒NN自適應控制器設計方法,通過Lyapunov穩定性理論證明了被控系統可跟蹤給定的期望位置、首向,跟蹤誤差收斂,可滿足DP系統控制精度要求,同時保證了所有自適應參數均有界。文獻[14-15]分別考慮了實際工程中存在的控制輸入飽和控制輸入約束的情況,主要思路是先對控制輸入數學模型進行合理的假設簡化,再對模型不確定性和參數未知的被控系統設計控制器。上述成果中所提出的控制策略均通過了Lyapunov穩定性證明和仿真驗證,然而在設計控制器時需假設系統所有狀態變量是可測的,而實際情況卻剛好相反,系統狀態變量無法通過傳感器進行測量。文獻[16-17]針對這種制約條件,通過構造高增益狀態觀測器,設計了基于FLS/NN自適應的輸出反饋控制器,理論證明和仿真試驗證明方法的正確性和有效性。
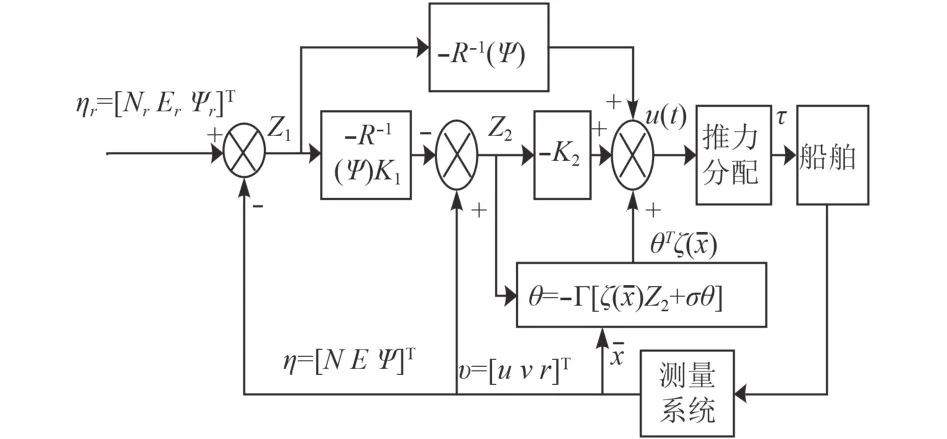
圖2 動力定位模糊自適應控制策略原理圖Fig. 2 The Schematic diagram of fuzzy adaptive control strategy for dynamic positioning model
基于FLS/NN自適應控制系統設計方法有如下優點:不需要建立系統精確地數學模型;對于未知干擾情況可通過構造干擾觀測器解決。該方法雖然優點多,但目前尚無應用成果,主要原因在于:1)基于萬能逼近器的自適應控制方法本身工程應用不成熟,船舶DP控制系統相對比較復雜,配置有特殊作業系統的船舶平臺造價昂貴,應首選成熟可靠的控制方法;2)模型逼近過程需要根據反饋誤差不斷的調節參數,表現出控制量的不斷調節,這與動力定位控制系統的綠色節能控制、推進器保護相沖突;3)在以往研究中,通常假設輸出變量完全可測的,而實際中位置、首向變量測量值會存在隨機干擾,即需要用先進的濾波算法如EKF,UKF等進行處理。
2.3 基于模型預測算法的DP控制策略
模型預測控制(Model predictive control,MPC)又稱為滾動時域控制,優化控制流程為:1)獲取當前時刻系統狀態測量值;2)求解一個優化控制問題得到預測控制時域控制率;3)將第1個控制量作為系統輸入;4)下一時刻回到第1步。MPC優點在于控制輸入變量可保證系統在預測控制時域內由跟蹤誤差等構成性能函數取得最優值,并且能夠有效地處理復雜系統的約束問題,實現復雜目標控制,因此,MPC成功地應用于船舶DP控制系統[18-21],基本原理框圖如圖3所示。
性能指標函數通常選用如下形式:

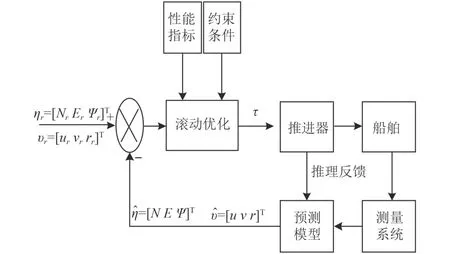
圖3 動力定位模型預測控制策略原理圖Fig. 3 The Schematic diagram of predictive control strategy for dynamic positioning model
Margarita[22]研究了存在控制輸入受限和外界干擾情況的DP預測控制系統設計方法,該方法包括非線性預測控制部分和線性控制部分,在臨近期望值時通過設置切換函數實現2個階段的自由切換,最終理論和仿真驗證了策略的有效性。梁海志等[23]采用模型預測控制,將虛擬控制力直接由推力器推力顯示表達,將性能指標中的控制力指標等效為推進器的能量消耗,并充分考慮了推進器物理性能和推力損失(槳-槳干擾等),同步實現了推力計算和推力分配。劉菊[24]針對實際動力定位控制系統設計工作復雜,作業時不能自定義修改最大導引速度的問題,提出一種基于模型預測控制的船舶動力定位導引控制系統。通過直接處理定位點之間的導引控制,保證控制系統不必要進行導引子系統設計,引入EKF濾波進行狀態估計,保證了DP系統的控制精度。文獻[25]詳細分析了DP控制系統的整個工作流程,提出的預測控制策略的優點在于將推力分配模型引入系統控制模型,基于此建立的性能指標函數引入如推進器的轉向角速度等因素,可更全面地評估控制策略,通過船模試驗證明了控制策略的有效性。
2.4 基于容錯控制算法的DP控制策略
通常水面DP船舶推進系統配置2個全回轉主推器和3個側推器,鉆井平臺等則配置4個全回轉主推器甚至更多。用于測量船舶位置、外界風浪力的傳感器也根據DP等級進行冗余配置。這種設計上的冗余考慮可以保證船舶平臺在單個或某幾個執行器/傳感器故障時船舶仍具備一定的DP能力,屬于硬件冗余。而容錯控制是在系統發生故障時可真正提高系統安全性和可靠性的另一種有效途徑,屬于軟件冗余。目前船舶動力定位系統容錯控制主要是針對推進系統及傳感器故障情況進行DP控制系統設計研究[26-31]。寧繼鵬[27]設計了基于虛擬傳感器的控制重構方法,解決了幾類傳感器故障的船舶動力定位問題。文獻[30]針對系統存在推進器故障發生和外部有界擾動情況,建立包含推進器失效、卡死、中斷3種故障情形的模型,設計了一種不依賴故障檢測模塊和故障信息上下界的自適應滑模控制器。文獻[31]針對過驅動近海供應船設計了基于故障容錯魯棒控制的動力定位系統,并與傳統PID控制方法進行了對比。
動力定位船舶容錯控制是十分復雜的課題,雖然針對推進器、傳感器故障的容錯控制取得了不少成績,但是船舶自主容錯控制方法并不完善,仍需進一步開展研究。
2.5 其他控制策略
滑模變結構控制對含有不確定擾動和未建模動態的非線性系統具有魯棒性強的特點,可以用來解決船舶DP所受的未知外界環境力的問題[9,32-35],但是滑模控制最大缺陷在于實現精確控制必然會引入輸入震顫問題,而這將大大縮短推進系統使用壽命,因此解決這一矛盾需開展深入研究。
此外,傳感器測量技術的發展,眾多學者采用擴展卡爾曼濾波(EKF)[24]、無跡卡爾曼濾波(UKF)[10,36-37]、容積卡爾曼濾波(CKF)[38-39]、粒子濾波(PF)等對狀態變量測量值進行濾波處理,然后將濾波后的狀態變量作為DP系統狀態輸入,這種方法可以保證DP控制系統具有精確的系統狀態變量。近些年來,濾波算法取得較多研究成果,但應用于船舶DP系統產品的只有EKF算法,如何將先進的非線性濾波算法應用于船舶DP系統仍需進行長期研究。
3 船舶DP控制策略研究方向
船舶DP控制系統未來研究方向可概括為兩類:一類是從控制理論方法本身發展和創新;另一類是從滿足新的需求方面研究,如水下平臺、解決復雜環境(如極限海況、冰區)和高控制要求(如精度、響應時間)等問題。
3.1 模糊自適應控制策略
模糊自適應控制方法由于對系統模型精確性要求不高,其萬能逼近特性可以解決船舶運動控制模型難建立、任務過程中船舶狀態變化導致模型的改變、未知外界環境力等問題。然而現今動力定位工程應用中尚無此控制方法,因此,基于模糊自適應控制策略的DP控制系統應首先實現工程應用,然后再解決控制輸入受限、飽和等復雜問題。此外,如何在模糊自適應DP控制策略中解決傳感器存在的量測噪聲問題,也需要進一步研究。
3.2 模型預測控制策略
基于預測控制策略的DP系統已成功應用于各類船舶,但目前所有DP系統船舶都對海況有嚴格要求,這主要受制于船舶排水量、推進器功率、船體型線、響應時間等因素。文獻[9]表明基于PID控制和滑模變節構控制的動力定位控制系統均能滿足極限海況條件,預測控制策略能否應用于極限海況仍需開展試驗以及實船驗證。預測控制核心在于滾動優化,保證每一步控制輸出為最優,這不可避免地導致DP系統的調節時間變長,如何更加快速地完成動力定位,需開展更深入的研究工作。
3.3 水下平臺DP控制策略
當前DP系統主要針對水面船舶設計,控制對象為船舶的位置、首向或航跡,而對于水下無人潛器、潛艇尚無動力定位產品。事實上隨著海洋作業的多樣化發展,水下平臺同樣存在動力定位需求。如水下潛器從事某種特殊定點作業,潛艇懸停等,要實現水下動力定位,控制對象至少包括水深、縱傾和橫傾。由此可見,水下平臺動力定位控制比水面平臺更加復雜,開展對水下平臺的DP控制策略相關研究工作無論從理論方面還是從工程應用方面都將意義深遠。
3.4 多DP船舶協同控制策略
隨著水面船舶DP技術迅速發展成熟,單艘船舶作業能力限制的問題越來越突出,而多艘DP船舶相互協調作業則具有更大的優勢,可大幅提高作業的效率,具有容錯性強和適應性強等優點[40-42]。如航行補給、資源勘探、移動式海上基地和破冰船護航等,往往需要多艘船舶相互協調才能共同完成任務。國內外目前已有較多學者進行過研究,但實際應用卻很少,協調編隊控制仍將是值得研究的方向。
4 結 語
隨著人類對海洋探索的不斷深入,現有DP控制策略將無法滿足使用需求。提升DP系統能力,首先要求測量系統提供更加精確位置、首向、風速風向、海浪等信息;其次要求推進系統配置更大功率的推進裝置,同時電推系統的響應時間也需盡可能短。但是當前提升傳感器設備的測量精度太難,而執行機構響應時間由槳葉加速過程、電氣元件信號傳遞等物理因素決定,縮短響應時間幾乎不可能,因此對DP系統的控制策略繼續進行深入研究,是行之有效的方法。本文通過對近幾年DP控制策略的研究情況進行梳理,分析了DP控制策略的發展方向,為今后DP系統研究工作提供思路。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
能源工程(2020年6期)2021-01-26 00:55:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56