水下“有人/無人”作戰平臺協同運用方式探討
2020-10-31 04:20:36何青海
艦船科學技術 2020年9期
關鍵詞:港口
吳 超,杜 輝,何青海
(海軍潛艇學院 作戰指揮系,山東 青島 266199)
0 引 言
隨著水下無人作戰力量的發展,水下作戰形態由以有人為主向有人無人相結合的歷史性跨越的趨勢越來越明顯。從遠期看,最本質的影響與挑戰表現為2個方面:一是從作戰領域看,無人作戰力量任務領域將由保障為主向主戰擴展,逐步滲透到任務全領域、作戰行動全過程。二是從作戰主體看,有人裝備逐漸從戰爭前端后移,無人平臺開始由有人裝備的補充、輔助向平等伙伴轉變,逐步代替部分有人裝備成為影響戰爭的重要力量。水下無人平臺與潛艇協同行動,可執行偵察監視與通信、反潛作戰、反艦、布雷等任務。比如,無人裝備作為一種信息對抗手段,發布虛假信息,吸引敵方注意力,保護己方潛艇逃避敵方探測跟蹤,完成突破島鏈、海上機動等任務;或者無人平臺作為干擾器,發射干擾信號對敵偵察、通信等實施破壞;或者無人裝備作為通信節點,通過與水下固定設施或水下、水面和空中平臺保持通信鏈接,以增強有人平臺作戰能力。
1 協同偵察運用方式
從水下無人平臺擔負的偵察任務看,憑借其“無人、無聲、無形”等作戰優勢,以“無人對有人”,以“暗對明”,充分發揮其“非對稱”作戰優勢,可根據作戰任務需要,深入主要作戰對手的嚴密防控海域,完成海區環境測量、水下監視系統監測等任務,進一步豐富潛艇偵察手段,拓展潛艇偵察海域,提高潛艇偵察效果。戰時可作為前出探測平臺,擔負區域警戒、引導等任務,為潛艇突破作戰對手反潛封鎖區、突破敵布雷障區域提供信息保障[1]。
1.1 協同偵察基地港口
基地港口的反潛體系一般比較嚴密,海區條件復雜,水面艦艇和航空兵難以抵近偵察,衛星只能完成部分偵察任務,潛艇由于受水深條件限制和敵情威脅,抵近偵察困難,此時潛艇可在作戰對手基地港口外安全距離上釋放水下無人平臺(UUV),由平臺自主前出到基地港口附近偵察。協同偵察時,潛艇攜帶UUV隱蔽航行到預先指定陣地,按照制定的偵察方案和計劃,潛艇與UUV按區域協同實施偵察。UUV到達預定的偵察海區后,按潛艇指令或預先確定的程序進行機動、偵察,查明基地港口的航道、進出港口的艦船情況、港口的防御配系、島岸防御設施和有關的水文氣象、海底地貌等情況,必要時隱蔽上浮進行拍照和攝像,記錄偵察結果,并將偵察資料帶回。潛艇釋放UUV后,在進入自己偵察陣地前,應進行必要的補充偵察,充分掌握陣地附近的敵情和海情,準確測定艦位,常規潛艇還應充足電量。在偵察陣地內,隱蔽待機,對陣地內海區水文環境、前出港口的艦船、島岸設施等進行補充偵察,并適時觀察UUV陣地內敵反潛活動情況。同時,按照規定時間回收UUV。
1.2 引導潛艇通過反潛封鎖區
為加強對潛艇兵力的攔截與封堵,作戰對手一般會在潛艇可能展開航路上建立由反潛巡邏機、艦艇、潛艇構成的立體反潛封鎖體系,阻止潛艇展開。UUV裝備于潛艇,可為潛艇兵力預先偵察、空中預警,引導潛艇兵力規避或支援潛艇兵力通過敵反潛封鎖區。具體來講,就是利用UUV體積小,噪聲低,速度慢,使用方式靈活、可遠距離投放使用等特點,UUV前出一定距離,預先對危險海區敵反潛兵力活動情況進行偵察,為潛艇兵力爭取更多規避時間。一般使用方式為:潛艇浮起充電時,使用UUV空中預警;潛艇突破敵可能的反潛封鎖海域,預先查明敵反潛兵力活動情況;潛艇展開時,前出偵察敵水下反潛兵力。

圖1 UUV遠程警戒導彈潛艇展開航路示意圖Fig. 1 The sketch map of launching route of long-range surveillance missile submarine using UUV
1.3 為潛艇提供水雷障礙信息
布設水雷障礙是封鎖作戰對手重要港口、水道的一種常用手段。潛艇通過水雷危險區前,先進行補充偵察,找出障礙通道或尾隨商船以及無反潛能力艦船通過。UUV則能夠適應這一要求,由潛艇或水面艦船預先釋放UUV對水雷障礙進行偵察、探測,查明敵方是否在我潛艇預定航道、薦用航線和海區布設有水雷,或者探查敵布水雷障礙的情況,為潛艇兵力提供水雷障礙信息。當潛艇接近敵可能布設雷障區時,準確測定艦位,在安全海區釋放UUV,而后由UUV自主航行到預定海區抵近偵察,潛艇在安全海區隱蔽待機,及時組織觀察,避免誤入雷區。UUV抵近預定海區后,使用探雷聲吶對海區進行偵察,查明潛艇航渡的預定水域是否有敵布水雷。如發現有水雷,繪制出相應的雷情圖,尋找并確定海上安全通道,進而避開水雷的威脅。如需要摧毀水雷,則派出攜帶炸藥包的UUV(或UUV群)前往滅雷[2]。

圖2 UUV偵察敵海上艦船搜尋薦用航道示意圖Fig. 2 The sketch map of using UUV to search the recommended channel for reconnaissance enemy ships
2 協同反潛運用方式
反潛作戰是無人裝備作戰運用的重點方向。UUV、水聲站、水下監視系統等無人平臺或裝備可作為探測節點為打擊兵力提供目標信息,也可以獨立執行對潛艇的發現和打擊任務,也可以與有人潛艇協同反潛;可單艘UUV實施反潛,也可多艘UUV組網反潛,也可與其他無人裝備系統運用。但不管平臺怎么用,其反潛運用方式可歸納為源頭封控、要道布控和要港守控 3 種[3]。
2.1 源頭封控
重要潛艇基地港口一般防御比較嚴密,大多數反潛兵力難以隱蔽接近或進入敵方控制的這些海域。因此,可由布放平臺攜帶UUV隱蔽航行至距重要潛艇港口航道或咽喉點海域一定距離(該距離一般在水聲通信距離之內)處,釋放UUV,由UUV自行航行至指定海域內,展開針對潛艇的反潛搜索監視任務行動。目前較適合對潛艇駐泊基地實施源頭封鎖的兵力主要為:隱蔽性較好的潛艇、UUV和無人布雷器。具體使用方法主要以下3種:一是多艘UUV協同封控。由于單艘UUV搜索能力有限,封控海域也比較小,為了盡可能遮攔敵潛艇展開航路,可部署多艘UUV抵近敵潛艇駐泊基地封鎖。二是協同反潛潛艇封控。由反潛潛艇攜帶UUV隱蔽航行至距敵潛艇港口航道或咽喉點海域一定距離(該距離一般在水聲通信距離之內)處釋放,由UUV自行或由反潛潛艇控制其航行至指定海域內,展開針對敵潛艇的反潛搜索監視任務行動。三是協同無人布雷器實施封鎖。運用無人布雷器在敵方潛艇基地或駐泊港口出入航道上布設水雷,阻撓敵方潛艇出入基地或駐泊港口。UUV則部署在布雷區域外側,攔截因規避水雷區域出入的敵潛艇。
2.2 島鏈攔截
利用島鏈關鍵海峽水道易封難突、地位重要的特點,可部署有人和無人反潛裝備實施堵截,阻攔敵方潛艇向作戰海域展開,或者掩護重要艦艇編隊突破。根據作戰對手潛艇的威脅情況,在水下預警體系的信息支撐下,UUV在第一島鏈重點海峽水道預先設伏,充分利用海底地形和水聲環境,選取有利陣位,作為“一點觸網、多點響應、全縱深反潛”體系運作機制中的重要打擊節點,建立反潛封鎖區,從而達到阻礙敵潛艇通過海峽水道進入我近海海域的作戰目標。具體使用方法:一是多UUV集中攔截。通過計算,在同等條件下,UUV使用巡邏線搜索方式將大大提高其遮攔寬度。由于大多數海峽水道比較寬闊,單個無人潛航器難以實施嚴密封控,為彌補現有單個UUV作業的不足,提高UUV環境感知、目標探測與定位和目標攻擊的能力,應多個偵察型、攻擊型UUV組成一個移動的“察打一體”網絡,該網絡可根據作戰需求前往某海峽水道布放,執行偵察、攔截和攻擊任務。二是引導潛艇實施攔截。潛艇位于敵反潛薄弱海域隱蔽待機,航行在隱蔽收信深度,釋放拖曳天線,保持全時收信和較高電量;UUV發現敵方潛艇后,將敵潛艇概略位置、航向等信息傳送至指揮所或潛艇;潛艇依據指揮所命令或目標信息,機動接敵,發現目標潛艇后實施攻擊。
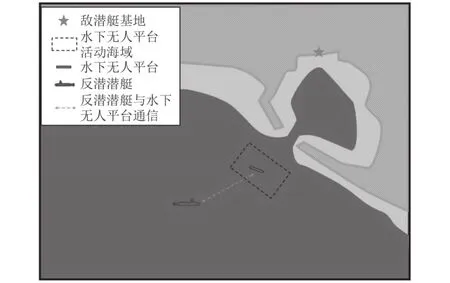
圖3 源頭封鎖時兵力配置示意圖Fig. 3 The sketch map of forces disposing of using UUVfor scaling and control
2.3 基地防御
戰時,作戰對手水下兵力可能隱蔽航行至我重要基地附近海域,對重要基地港口布雷封鎖;或者在我海上重要目標出港的航路上隱蔽設伏,進行攔截和打擊。因此應根據有無人反潛裝備的特點,合理部署、綜合運用。比如利用UUV隱蔽性較好的特點,將其配置在重要基地港口外側,與港口、基地其他機動或固定探潛裝備相互協同,組成水下警戒線。多艘無人航行器在劃定的陣位往復搜索,對水下可疑目標實施監控,并將數據定時傳送至在附近隱蔽部署的潛艇、艦艇或岸上指揮中心。在判明存在敵情威脅時,由港口防御兵力、UUV和港口外側部署的潛艇兵力,協同完成對水下敵方目標的打擊,從而實現港口、基地附近海域的掌控。 或者在重要基地外圍淺水區,利用海域環境復雜、商船漁船比較多、敵方潛艇無法使用拖曳聲吶、尾部是其搜索盲區且輻射噪聲最大等條件,UUV和潛艇分區部署,尾隨抵近港口布雷的敵潛艇,發現后UUV與潛艇協同攻擊敵潛艇。
3 協同反艦運用方式
潛艇兵力是打擊水面艦艇編隊的主戰兵力,可預先設置攻擊陣地,對水面艦艇實施遠程導彈攻擊,也可以在水下突防使用魚雷打擊水面艦艇。UUV能在海峽、航道、敵基地和港口等附近海域或特定海域,配合潛艇實施反艦作戰。其可前出實施目標探測,利用衛星通信通過岸基指揮中心,將敵艦目標信息傳給我方潛艇,以延長我潛艇探測范圍;也可使用自帶魚雷,借助衛星和無線電等通信手段,協同潛艇對水面艦艇實施自主攻擊[4]。
3.1 為潛艇魚雷攻擊提供中遠程預警
當前,水面艦艇采用大量隱身、降噪技術以及裝備了拖曳陣聲吶,潛艇相對于敵水面艦艇,由于存在探測手段少、發現距離近等困難,潛艇傳統的先敵發現、先敵攻擊的優勢已基本喪失。UUV具有噪聲低、機動能力強等特點,可前出前出實施目標探測,將目標信息傳給我方潛艇,以延長我潛艇探測范圍,引導潛艇對水面艦艇實施魚雷攻擊,在某種程度上能夠解決潛艇魚雷攻艦的一些難題。運用UUV為潛艇魚雷攻擊提供中遠程預警,要確定水下無人作戰平臺最小前出距離和巡邏線寬度,確保UUV及時發現目標信息后,能夠把信息及時傳遞給待機潛艇,潛艇能夠及時占領攻擊陣位,實施魚雷攻擊。
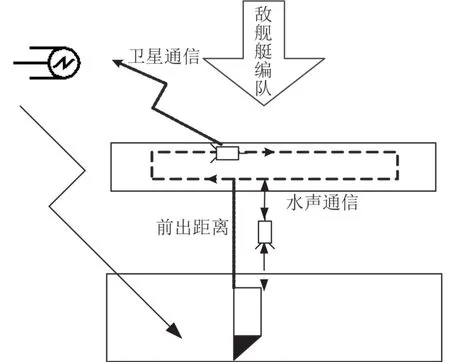
圖4 UUV引導潛艇魚雷攻擊示意圖Fig. 4 The sketch map of UUV guided submarine torpedo attack
3.2 為潛艇導彈遠程攻擊提供目標指示
由于潛艇自身探測距離近,無法發揮潛射中遠程導彈的效能,且多數引導兵力存在重要作戰區域待不住、聯不上的困難。而UUV具有隱蔽性好、目標小等特點,可前出至重要艦艇主要威脅區,對目標實施連續偵察,通過衛星通信手段為潛艇遠程導彈攻擊提供近目標指示,以最大程度上發揮我潛射遠程導彈的效能[5]。比如為打擊高價值水面目標,提前部署若干艘無人航行器,至作戰對手艦艇活動海域或必經航路,另以1~2艘具備遠程反艦能力的潛艇在數百千米外陣位待機,當無人航行器發現并識別敵方艦艇目標后,
對目標保持跟蹤,同時依托指揮信息網絡,將目標信息報知待機潛艇,潛艇即發射遠程反艦導彈,對高價值水面目標進行打擊。

圖5 UUV引導潛艇導彈攻擊示意圖Fig. 5 The sketch map of UUV guided submarine missile attack
3.3 有人無人協同反艦
為打擊高價值水面目標,可綜合運用攻擊型UUV和潛艇協同作戰。在作戰區域內,部署多艘配備魚雷的大型對抗攻擊型無人航行器,每艘無人航行器在作戰區域內特定陣位長時間巡航游弋、隱蔽打擊,通過天基衛星、空中預警機等手段實施掌握高價值水面目標位置信息,一旦進入我預設的作戰區,即向多艘無人航行器傳送目標位置信息,并發布打擊指令,無人航行器即以魚雷等武器從多個方向對目標發動協同攻擊。此時潛艇可利用無人航行器攻擊效果,在遠距離實施導彈攻擊,或者趁亂抵近實施魚雷攻擊。
4 協同布雷運用方式
無人布雷器的出現,打破了長期以來由潛艇獨自支撐水下隱蔽布雷作戰的局面,建立了水下有人和無人相結合的布雷力量體系,進一步提高了水下封控能力。由于潛艇與無人布雷器攜帶的水雷數量相對有限,在對某一海域或港口實施布雷封鎖時,往往需要多艘潛艇和無人布雷器共同完成任務,這就存在相互之間的協同問題。如使用多艘無人布雷器布雷時,不僅僅要關注無人布雷器與潛艇之間的協同,還應關注多艘無人布雷器之間的協同。在制定協同計劃時,應確定明確潛艇與無人布雷器的出航時間、布放時間、所選擇的航線、布雷位置點、布雷時間和布雷數量等,合理運用協同方式,避免在布雷過程中出現誤傷。
4.1 區分海域協同
在組織布雷作戰時,應根據敵我雙方態勢、水下兵力性能、敵港口、航道距我兵力遠近和敵防御力量強弱,為各水下兵力確定布雷海域,即按區分海域協同。特別是使用多艘無人布雷器布雷時,不僅僅要關注無人布雷器與潛艇之間的協同,還應關注多艘無人布雷器之間的協同。在制定計劃時,要明確潛艇與每艘無人布雷器的展開航路,劃出航路隔離帶[6]。
4.2 區分時間協同
向同一海域布雷的無人布雷器和潛艇之間的協同,應采用區分時間協同方式。由于無人布雷器布放方式多樣,在制定協同計劃時,應確定明確潛艇與無人布雷器的出航時間、布放時間、所選擇的航線、布雷位置點、布雷時間和布雷數量等,避免在布雷過程中出現誤傷。另外在對同一港口實施布雷時,由無人布雷器先布設沉底雷,待其布設完畢后,潛艇再布設遠程自航水雷。
4.3 區分方向協同
對同一任務區域組織潛艇和無人布雷器共同執行布雷任務時,根據該區域的水深、底質、海流、防御設施等情況,組織潛艇與無人布雷器材從不同方向進入布雷。對水深較淺、透明度較高的方向,運用無人布雷器實施布雷利于隱蔽。對水深大、海流復雜,海上航行船舶動態不定的區域,由潛艇執行布雷任務更利于實現上級企圖。
4.4 區分任務協同
無人布雷器航程遠時,到達布雷位置點的位置誤差較大,適合布設對位置要求不高的攻擊性水雷群、零散水雷,不適合布設定位精度要求高的水雷線、鉗制性水雷群;潛艇一次性投放水雷數量相對較多,能夠采取的定位措施多樣,在必要時,可以布設短雷線、密集的小雷群。潛艇對已布設的水雷區,還可根據觀察的情況,進行補充布雷和后續布雷,給敵人以出其不意的殺傷。
5 結 語
隨著水下無人平臺技術上的不斷進步,功能上的不斷完善,任務上的不斷拓展,使用上的不斷優化,必將導致水下無人作戰力量的發展壯大,導致水下無人平臺在海軍兵力結構中占比的不斷提升,“平臺無人、系統有人,前線無人、后方有人,行動無人、指控有人”的新型作戰樣式將成為未來戰場的主要作戰樣式,海戰場作戰模式也將隨之發生深刻變革。
猜你喜歡
環球時報(2023-01-29)2023-01-29 15:13:42
金橋(2022年10期)2022-10-11 03:29:46
金橋(2022年10期)2022-10-11 03:29:36
金橋(2022年10期)2022-10-11 03:29:22
機電設備(2022年2期)2022-06-15 03:20:38
青年文學家(2022年2期)2022-03-17 21:57:14
閱讀與作文(小學高年級版)(2020年4期)2020-05-26 14:15:02
當代工人(2019年20期)2019-12-13 08:26:11
數學大王·趣味邏輯(2019年2期)2019-01-23 10:49:26
水上消防(2018年4期)2018-09-18 01:49:38