基于無線通信技術的擺閘通道工作穩定性提升方法探究
2020-11-04 06:54:40胡鵬路
無線互聯科技 2020年13期
關鍵詞:設備
胡鵬路
(南京熊貓機電儀技術有限公司,江蘇 南京 210000)
0 引言
普通的擺閘通道主要由箱體、驅動電機、傳動機構、門體、光電傳感器、控制板、身份識別等部件組成,兩臺設備并排放置,可組成一個完整的通行通道,供人員或非機動車輛自助通行。在實際使用過程中,用戶的使用習慣和行為存在很大差別,有時還會出現異常和違規操作,使得擺閘通道的閘機設備容易出現各類故障,因此,本文將針對如何提升擺閘通道工作的穩定性進行探究。
1 擺閘通道的基本原理
普通擺閘由驅動電機帶動傳動機構工作,傳動機構中設置3個非接觸式限位開關,電機和限位開關的電路與主控板連接。在控制電機運動時,主控板不斷讀取限位開關的感應信號,當發生變化時,控制電機停止,從而實現對擺門門體正向開門、反向開門和關門3個角度的控制。光電傳感器由一個發射端和一個接收端成對組成使用,用于檢測人員在通道內的位置和行為,主控板通過簡單的傳感器算法判斷開門后人員是否進入或離開通道[1]。
2 影響擺閘通道工作穩定性的因素
對于擺閘通道而言,影響通道工作穩定性的因素是多個方面的,以下分別從電機控制、傳感器和通行算法3個方面來進行分析。
2.1 電機控制對擺閘工作穩定性的影響
普通擺閘的通道內部設有成對的兩個門體,同步開合工作。在實際使用時,會出現通行人員與門體撞擊的情況,因電機啟停是由3個限位開關感應信號判定,當門體運動過程中無法監測其具體位置而被撞擊時,兩個門的運動位置將不再同步,多次撞擊后,門體與電機軸之間易發生機械偏移,對電機軸和傳動機構造成損壞,導致驅動電機、傳動機構的故障率提升。
2.2 傳感器對擺閘工作穩定性的影響
擺閘通道的傳感器多采用光電對射式傳感器,成對安裝于機箱內側。當人員經過通道時,會遮擋光電傳感器的光束,并使傳感器的輸出信號發生變化,控制板通過傳感器信號變化,判斷人員是否進入或離開通道。在實際使用中,傳感器光束有時會被異物遮擋,或當設備老舊后發生傾斜,影響光束對正,在普通擺閘產品中,只要其中一個傳感器發生異常或故障,整個設備都將無法正常工作。
2.3 通行控制算法對擺閘工作穩定性的影響
通行算法是擺閘通道的靈魂,用于實現各類通道的功能。一般來說,通行算法具備防夾、防尾隨、防闖入等功能,在防夾算法上,很多擺閘防夾區設置較為簡單,無論是正向、反向的開門或關門,均采用同一防夾區,且在防尾隨、防闖入的設計上,僅通過端部的一個傳感器判斷,缺乏對甩臂、細物的識別,使得設備工作不夠智能,容易出現誤動作,影響產品的穩定性[2]。
2.4 設備缺乏全生命周期管理和持續優化
在實際布放應用時,擺閘設備的網絡通常被要求接入專網,專網服務器上的后臺管理軟件僅對擺閘設備的業務數據進行管理,對于設備本身的運行狀態及各個部件的異常情況缺乏相關的信息管理。設備廠家在完成現場安裝調試后,沒有足夠渠道獲取設備全生命周期的運行狀態信息,缺乏對產品進行持續優化的支撐數據,因而無法不斷對產品穩定性進行提升。
3 提高擺閘通道工作穩定性的方法
3.1 采用伺服及電磁離合技術
針對電機控制對設備工作穩定性的影響,可以采用伺服技術,結合電磁離合技術,對門體進行運動控制。采用增量式伺服編碼器,對門體停止及運動時的位置進行實時且精確的監控。兩個門體控制器之間通過數據線連接,并對其運動位置進行實時同步控制,避免出現兩門運動不同步的故障。門體的正向開門、反向開門和關門角度也通過編碼器對位置進行精確控制,防止出現位置偏移。門體運動時,伺服電機采用加減速曲線控制,延長電機驅動部件的使用壽命。應用電磁離合技術,電機驅動通過電磁離合抱閘器與門體傳動軸連接,當門體處于阻攔狀態時,電磁離合器鎖閘,避免外部強行推力作用在伺服電機軸上;當門體在運動過程中需要急停時,也先由電磁離合器進行鎖閘,有效提升了電機驅動部件壽命,降低設備故障率。
3.2 優化傳感器系統
傳感器系統由設置于通道內部的多組光電傳感器及內置了傳感器識別算法的傳感器邏輯控制器共同組成。光電傳感器的光束發散角度在5°~8°為宜,如發散角度過小,當機箱振動或傳感器位置偏移,容易出現光束對正失敗;如發散角度過大,光束可能會覆蓋相鄰的接收傳感器,從而產生誤信號。傳感器邏輯控制器能夠對所有光電傳感器的正常或異常狀態進行檢測,通過切斷光電傳感器發射端的電源,熄滅發射光束,并在接收端檢測對應信號變化,來判斷傳感器是否處于正常狀態。當控制器檢測到有傳感器出現異常時,重新生成降級機制的通道控制邏輯程序,并保證設備正常運行,避免因個別傳感器出現異常而影響整個設備的工作。
3.3 優化通行控制算法
采用基于ARM處理器的通行控制器,對通行控制算法進行優化。將防夾區細分為開門A方向、開門B方向、關門A方向和關門B方向4個不同的防夾識別區(見圖1),降低門體運動時的夾撞事件,提升設備工作穩定性。
在防尾隨、防闖入的設計上,采用多組傳感器結合判斷的方式,增加對甩臂、細物等誤觸發識別的能力,從而對設備進行更加智能、準確地控制,提升設備的工作穩定性。當檢測到異常闖入事件時,及時通過聲光報警對闖入人員進行提示,增量式編碼器實時監測門體角度,如出現異常的角度偏移,則判定為強行推閘事件,此時,控制器立即控制電磁離合器鎖閘,從而避免對電機驅動部件造成進一步損傷。
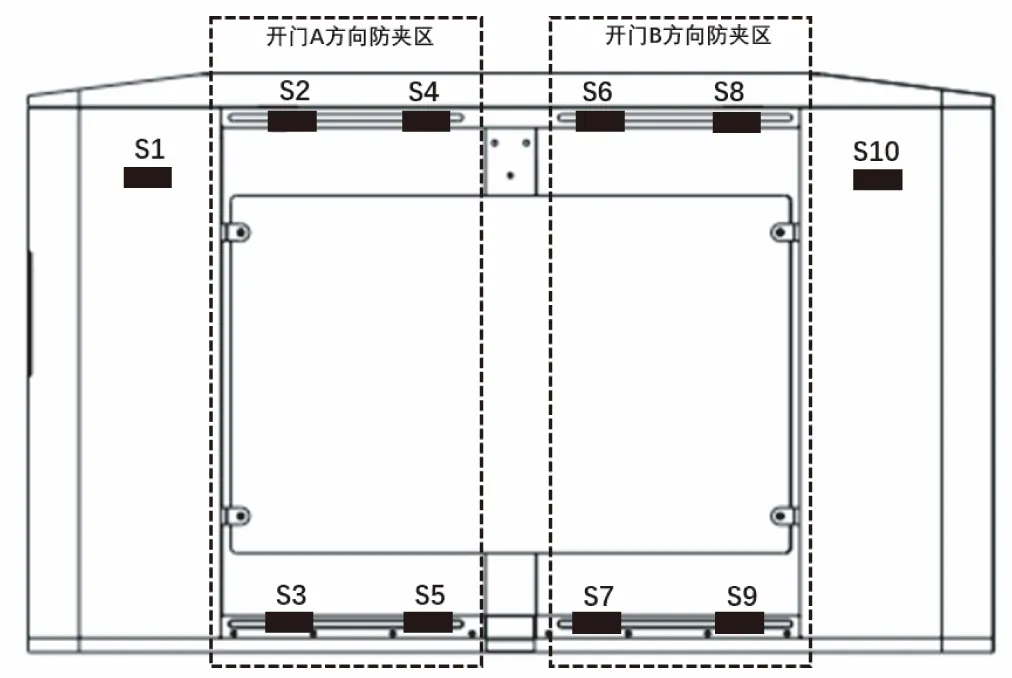
圖1 4個不同的防夾識別區
3.4 采用無線通信技術實現全生命周期管理
在閘機設備內部,安裝基于NB-IoT窄帶物聯網技術的具備邊緣計算能力的無線通信模塊,并與閘機控制器連接,從而對傳感器、伺服電機等各個部件的運行狀態數據進行讀取;利用NB-IoT通信技術,將設備運行狀態數據發送到云端的運維管理平臺,對設備各個模塊長期的運行狀態數據進行收集和處理,實現對設備的全生命周期管理。通過智能分析,對設備提出改進意見,持續對設備進行完善。
4 結語
通過上述對擺閘通道工作穩定性問題的分析和研究可以看出,擺閘設備是一個集機械、電氣、軟件知識于一身的綜合性技術產品,需要在方案設計階段就從整體上進行綜合分析和考慮,對于各部件的細節也需要不斷優化,根據不同用戶的使用習慣,通過多重手段對設備工作過程中可能出現的異常進行有效應對,并利用無線通信技術對設備進行全生命周期管理。只有根據長期積累的運行數據進行持續優化,才能使設備具有較好的工作穩定性。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00