電動助力轉向系統回正控制及仿真
2020-11-04 09:56:42
科教導刊·電子版 2020年26期
(濱州學院 山東·濱州 256600)
0 引言
汽車在轉向行駛過程中,如果方向盤不能及時回正,勢必會引起駕駛安全問題。隨著人們對駕駛安全要求的提高,如何提高轉向性能成為了重要問題。轉向控制策略是影響轉向性能的關鍵,同時也是EPS系統研究和開發的重點,其優劣直接影響電動助力轉向系統的整體性能進而影響汽車的駕駛體驗。目前,關于轉向系統控制策略的研究大多集中在轉向性能的單向指標控制方面,對于兼顧多項性能指標的回正控制策略的硏究較少。因此,研究如何能使方向盤快速、平穩的回到中間位置的同時,減輕駕駛員的操縱力,提高汽車的回正性能具有重要意義。
1 電動助力轉向系統回正模型建立
本文對電動助力轉向系統在不影響系統基本結構的條件下進行簡化處理,主要考慮阻尼、彈性和慣性的影響,忽略一些對轉向系統的次要影響,這樣不僅可以減少不必要的工作量,還能減少各個部件之間的耦合影響。想要所建模型簡潔,將一些系統的機構進行合并,將EPS系統劃分成以下幾個部分來分別研究和建立數學模型:
1.1 電動助力轉向系統數學模型
1.1.1 轉向盤和轉向軸
汽車轉向時,方向盤首先受到力的作用,接著傳遞到轉向軸上通過轉向軸向下傳遞,完成這一部分傳遞扭矩的任務。建立轉向盤和轉向軸的動力學方程如下:

1.1.2 轉矩傳感器
本文扭矩傳感器用扭力桿模型代替,通過轉向軸輸入和輸出端的轉角的變化差值與扭力桿剛度系數相乘,就可計算出轉向軸的扭矩,假設所有連接都是剛性的,則轉向輸出軸的轉角可用小齒輪的轉角來代替,根據以上信息所列出的方程為:
1.1.3 助力電機
助力電機的電壓方程是:

對助力電機進行受力分析,建立其動力學模型:

1.1.4 齒輪齒條機構
建模時將齒條和輪胎看做一個整體進行研究,對齒輪齒條進行受力分析,得:

1.2 回正控制數學模型
汽車轉向回正時輪胎所受的力矩主要由路面與輪胎的摩擦力矩、重力回正力矩、側向力引起的回正力矩等組成。

汽車在低速回正時,側向回正力矩較小,輪胎與地面的摩擦阻力Tf和前軸載荷引起的重力回正力矩TG起主要作用:Td1=Tf+TG
此時由于汽車車速極低,輪胎與地面的摩擦阻力可以近似等于原地轉向時所受的摩擦阻力,即

2 EPS回正控制策略的研究
2.1 回正性能評價指標
回正殘余角是評判回正性能的重要指標,主動回正性能好的電動助力轉向系統能夠保證不同工況下都能保持較小的回正殘余角,回正時間也是評價回正性能好壞的一項重要指標,相同工況下,方向盤回到中間位置的時間越短,回正性能越好。所以本文回正性能的評價指標主要是回正殘余角和回正時間。
2.2 回正控制方案的設計

圖1:助力特性曲線
本文設計一種算法,該算法有兩部分構成,分別是模糊控制器和PID控制器,模糊控制算法設計的主要仼務是完成模糊控制器的設計,控制器的輸入為目標電流和電機實際電流的偏差和偏差變化率。根據直線型助力特性曲線的研究方案,設計助力特征參數Td0、Tdmax、Imax和k(v)。其中車速感應系數k(v)的確定根據軟件進行模擬,將特征車速和目標電流的值輸入到MATLAB中進行指數函數的擬合,最終得到的助力特性曲線如圖1所示。
3 電動助力系統回正控制仿真
3.1 電動助力轉向系統及回正模塊的建立
本文利用Matlab中的simulink工具箱,根據各模塊的數學模型完成各個部分的搭建,經過封裝后完成電動助力轉向系統整體的搭建,再利用 carsim軟件建立汽車模型導入到simulink中。在此基礎上進行回正控制策略的優化,下圖是電動轉向系統整體模型:

圖2:回正控制整體模型
3.2 回正控制策略仿真分析
研究控制策略的影響,我們采用的是MATLAB中的MPC Designer工具箱,直接驗證回正策略的影響,下圖分別為有無回正控制策略和有回正控制策略生成的曲線:
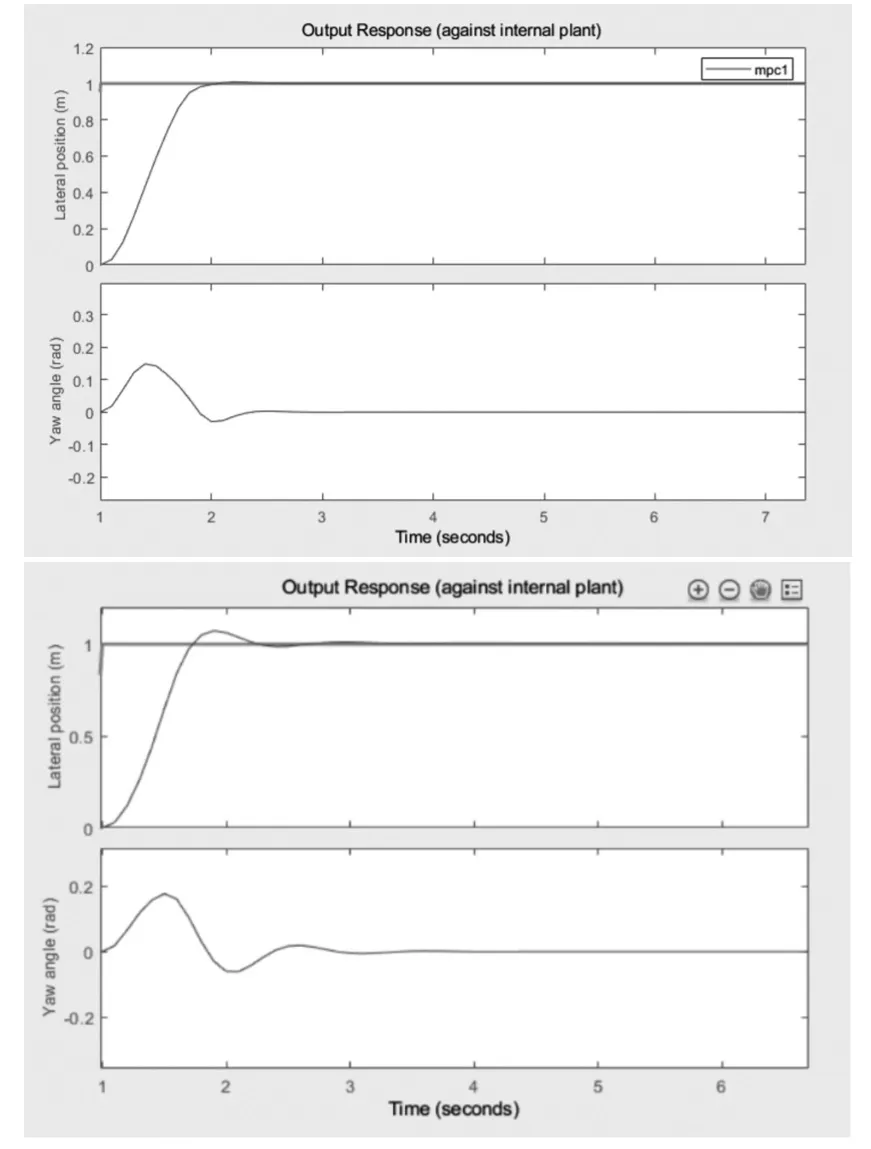
圖3:有回正策略(左)與無回正策略(右)對比圖
由圖3可知有回正控制的電動助力轉向系統在2.3秒內回正,無回正控制的電動助力轉向系統回正過程需要3秒,不帶回正控制策略的會出現回正不足和超調現象,所以,本文設計的回正控制策略能有效提高汽車回正性能。
3.3 回正仿真分析
本節進行不同工況下的模型性能仿真,設置速度范圍為60~90km/h,橫坐標為回正時間,縱坐標為回正殘余角。

圖4:回正仿真曲線
在速度范圍為60~90km/h情況下有回正控制產生的超調量減小小很多,且回正曲線相對平穩,說明回正過程更加平穩,回正時間更短,響應更加迅速。所以,本文所設計的回正控制策略能夠提高汽車的回正性能。
4 結論
控制策略研究是汽車轉向系統的研究重點和難點,雖然本文在對電動助力系統的回正策略硏究方面已經達到了預期的效果,但是由于本人能力有限,有關問題還需要進一步研究:
(1)本文只硏究了EPS系統的回正控制策略,對于補償控制和阻尼控制等有待進一步研究。
(2)建立更加準確完善的回正力矩模型,對地面和轉向系統的摩擦阻力進行更精確的分析,以便得到更加接近實況的EPS系統模型。
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
能源工程(2020年6期)2021-01-26 00:55:22
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
商周刊(2017年17期)2017-09-08 13:08:58
作文大王·低年級(2016年4期)2016-04-18 00:24:37
通信電源技術(2016年1期)2016-04-16 04:57:26
