小縱橫比光電器件發射端耦合工藝研究及優化
2020-11-05 08:42:52江秋月仲順順周雄鋒吳國棟
激光技術 2020年5期
江秋月,仲順順,周雄鋒*,吳國棟,馬 著,孫 翔
(1.中南大學 機電工程學院,長沙 410083;2.中南大學 高性能復雜制造國家重點實驗室,長沙 410083)
引 言
本文中基于2.5G BOSA,采用小縱橫比(豎直和水平方向發散角比值小于2)半導體激光器,建立LD-lens-SMF的耦合模型,利用物理光線追蹤法,分析耦合過程中各個方向自由度改變對模型耦合效率的影響,并搭建耦合平臺進行實驗驗證;將仿真和實驗結果進行了對比分析,得出了耦合效率對各自由度變化的敏感程度,研究結果指導了運動平臺的選型和耦合設備的設計,優化了耦合封裝工藝流程。
1 實體模型與耦合原理
BOSA光電元件主要由發射端(LD TO-can)、接收端(PD TO-can)、基體、SMF等零件利用膠粘和焊接等方式組合而成,如圖1所示。其發射端的主要作用是將電信號轉化為光信號,主要用于發射機;接收端主要作用是將光信號轉化為電信號,主要用于接收機;光纖的作用是用于光信號傳輸[10]。圖中,PD(photo-diode)是光電二極管,TO-can表示晶體管外形是罐型(transistor outline can)封裝方式。
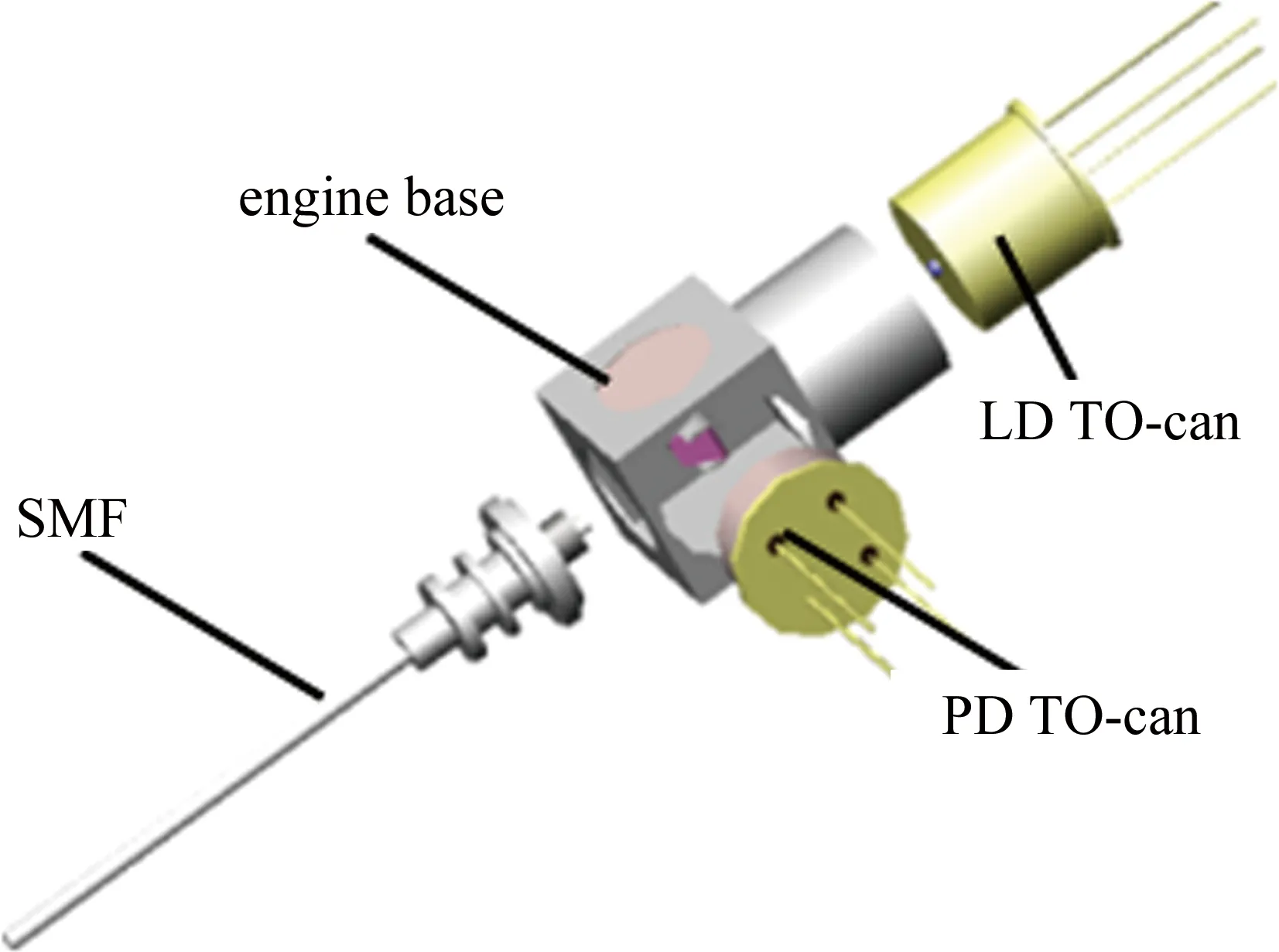
Fig.1 Bi-directional optical sub-assembly
同軸型光電子器件發射端中,LD發出的光束經過透鏡的匯聚后耦合進SMF,其耦合的基本原理如圖2所示。LD為單模激光器,球透鏡匯聚光線,LD發射的激光經過球透鏡的聚焦,在另一方向的焦點處產生光斑,移動SMF與光斑的相對位置可以改變進入光纖中光的能量高低,當SMF與LD產生的光斑兩者模場達到最佳匹配時,即達到了整個系統的最佳耦合效率。
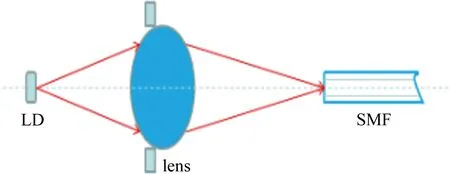
Fig.2 Coupling schematic
2 仿真模型與實驗
2.1 仿真模型的建立
2.1.1 光纖及激光器參量 建立BOSA發射端的耦合模型,即實現SMF與LD的高精度耦合,首先需對光束的模場、束腰半徑及數值孔徑進行計算和研究。SMF芯徑很小,只有8μm~10μm左右,只能傳輸一種模式的光,其模間色散小,適用于遠程通訊,SMF模場高斯分布是旋轉對稱的,其數學表達式如下式所示[14]:
(1)
式中,A代表振幅,r代表光纖的徑向長度,w0代表單模光纖的模場半徑。
采用國產G652.B單模光纖(中心波長為1310nm,模場直徑為9μm~10μm)為研究對象,其束腰半徑定義為4.6μm,數值孔徑為0.14。模場仿真分布如圖3所示,基本為標準的圓形。
可以看出,陳、張兩位先生對借代辭格的類型劃分大體上是一致的。只是借代的小類名稱和數量略有不同:《發凡》中的“事物和事物的作家相代”,《修辭學》中沒有涉及;《修辭學》中的“以特征的喻體代本體(可以看成比喻兼借代)”在《發凡》中沒有提及。
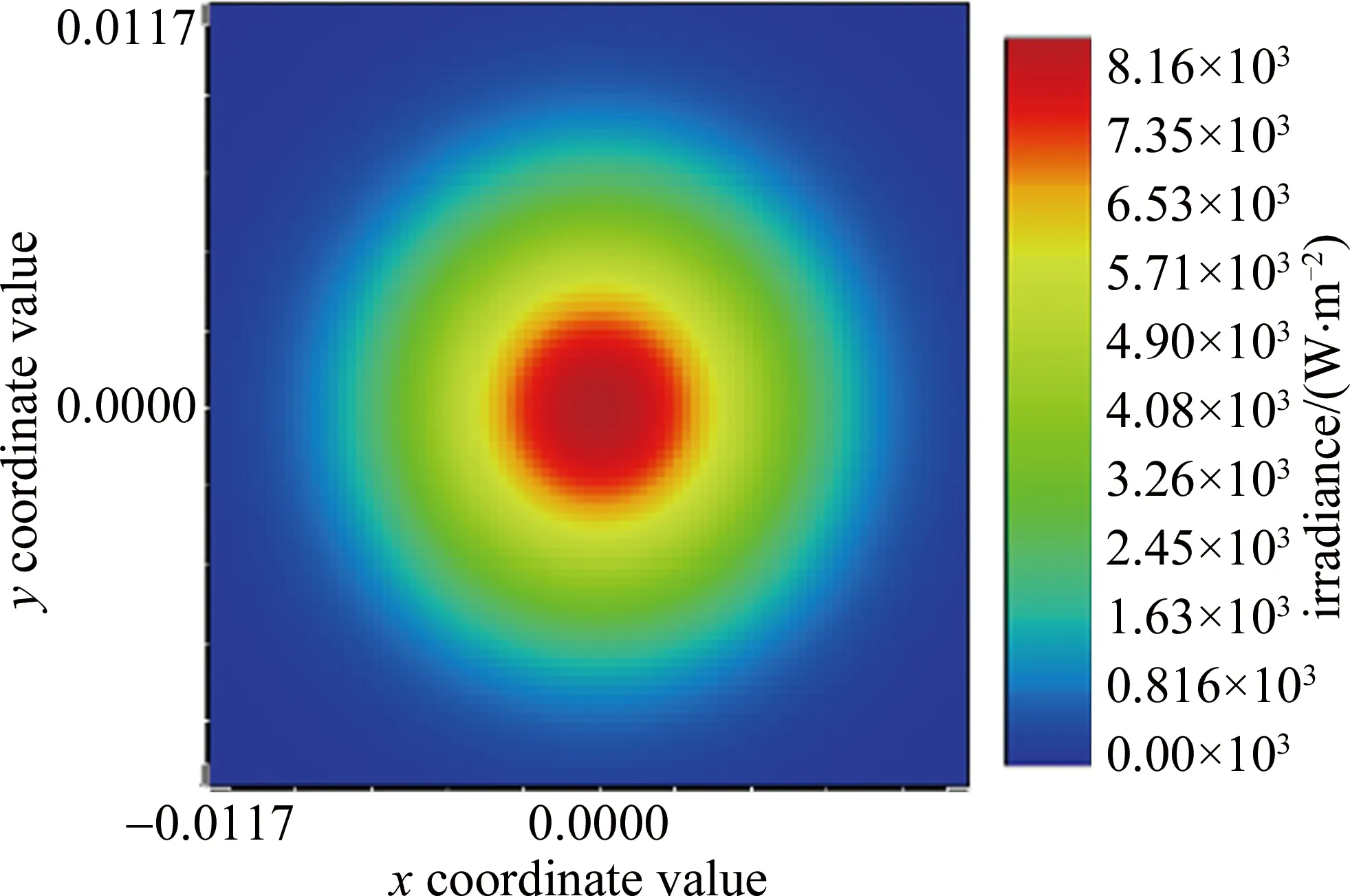
Fig.3 Simulation diagram of fiber mode field distribution
BOSA發射端內部結構如圖4所示。通過設置光源類型可以模擬單模激光器光束,其光束分布可以近似看作高斯分布[15],LD發出的光束經透鏡匯聚后與SMF進行耦合,耦合前經透鏡整形后在光纖端面形成的光斑如圖5所示。選用的激光器類型為(InGa)(AsP)/InP雙異質結小縱橫比激光器,其具體參量如下:標準功率P0=6mW,加載電流30mA,工作中心波長λ=1310nm,發散角θ∥=25°,θ⊥=38.27°。激光器的數值孔徑由以下兩式求出[16],分別為:dNA,∥=0.363,dNA,⊥=0.537。
dNA,∥=sin(0.85×θ∥)
(2)
dNA,⊥=sin(0.85×θ⊥)
(3)
高斯函數中,發散角與光束強度為1/e2時的半角的比值為0.84932,通常取0.85[14]。dNA,∥表示水平方向的數值孔徑,dNA,⊥表示垂直方向的數值孔徑。得出激光器光束的束腰半徑[17]:w∥=1.911μm,w⊥=3.6755μm。
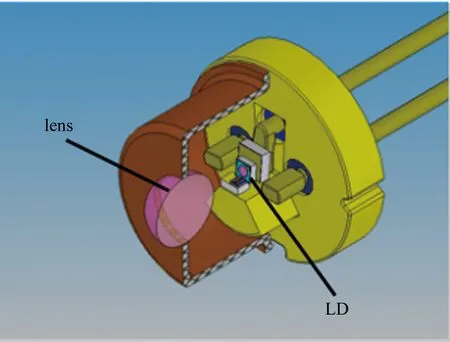
Fig.4 3-D picture of BOSA device emitter
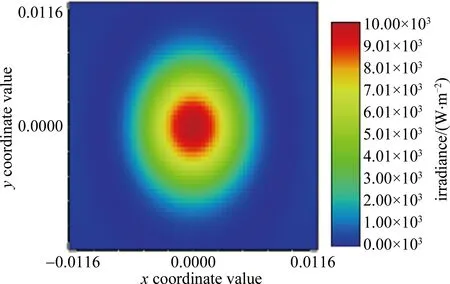
Fig.5 Simulation diagram of mode field distribution
建立仿真模型后,設置仿真工藝參量,如表1所示。
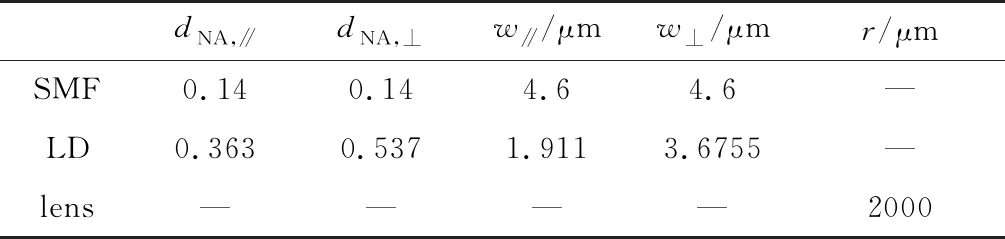
Table 1 The value of specific parameters
2.1.2 仿真及耦合效率的計算 在光學仿真軟件中,首先設置LD、透鏡以及SMF的參量,通過物理光線軌跡追蹤的方法,調整SMF與LD的相對位置和角度位置,使LD與SMF的模場的達到最佳匹配,從而獲得最佳耦合效率。仿真耦合效率利用下式進行計算:
T=
(4)
式中,Fr(x,y)是描述接收光纖復振幅的函數,W(x,y)是描述耦合到光纖中的光束的復振幅的函數,上標′表示復共軛。當光束模式的幅度和相位在所有點處完全匹配光纖模式時,實現最大接收器效率T=1.0; 模式形狀或相位的任何偏差都會對T的值產生較大影響,使其減小到小于1.0。
在SMF與LD的耦合過程中,忽略光的吸收以及散射等其它情況,經過透鏡匯聚的光斑模場與SMF的模場匹配程度越高,則耦合效率越大[18],選用小縱橫比的半導體激光器其模場分布更加接近于圓形,在經過球透鏡聚焦后,其光斑模場與光纖模場的匹配程度更高,有利于總的耦合效率的提高。
2.2 實驗平臺
BOSA激光器端與光纖的耦合精度達到0.1μm量級, 因此在實驗平臺搭建過程中,需要選取高精密的運動平臺來實現LD和SMF的相對運動,并結合全局最優搜索算法,才能達到最大的耦合效率。目前國內生產廠家合格器件通常選擇在最大耦合效率處波動3%~5%為可接受范圍,結合仿真結果,x,y運動方向選用日本駿河生產的型號為KYG06020-C的運動平臺,該平臺的重復定位精度為0.1μm,z運動方向選用型號為KYL06050-N1-C運動平臺,重復定位精度為0.5μm;x′,y′運動方向(表示繞x,y旋轉)的平臺選用型號為KAWO6100-LA,旋轉中心為100mm;可以滿足本次激光器與光纖耦合試驗的要求。運用實驗室自行研發的LD自動耦合系統可實現LD和SMF的自動耦合對準,其基本原理為:上夾具夾持SMF保持豎直,LD插入其管座并且放入下夾具中夾緊,z軸運動平臺保
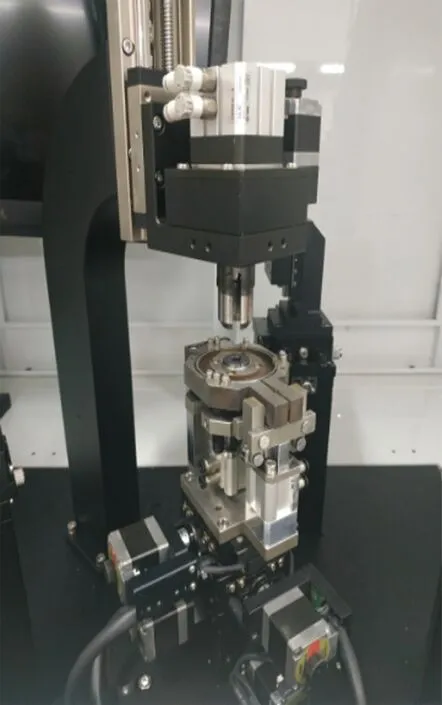
Fig.6 Diagram of the coupling platform
證光纖與LD的縱向距離,x,y運動平臺保證SMF與LD的橫向距離,x′,y′運動平臺保證LD分別繞x,y軸旋轉,將激光二極管插座和光纖尾端分別通過導線和探頭連入光功率計即可對耦合功率的變化情況進行實時監測。耦合平臺實物圖如圖6所示。
3 結果與討論
3.1 最大耦合效率比較分析
仿真得到的最大耦合效率為64.29%,并不能達到理想的100%耦合效率。分析原因如下:雖然本文中采用的激光器快軸和慢軸發散角十分接近,但是球透鏡不能對光束進行整形,這就導致在光纖端面仍然形成了一個橢圓形,光斑模場與光纖模場并不匹配;同時由于球透鏡存在球差(見圖7),導致光線難以聚焦到一點,如圖8所示。在入瞳半徑為0.6684mm時,球差的尺寸為1.584mm,這導致產生的光斑的尺寸要大于單模光纖模場的尺寸;另外,透鏡對光線具有吸收作用以及激光在傳輸過程中存在折射、衍射等情況,均會造成傳輸過程中能量的損耗。以上幾點造成了模型的耦合效率為64.29%。

Fig.7 Coupled simulation diagram
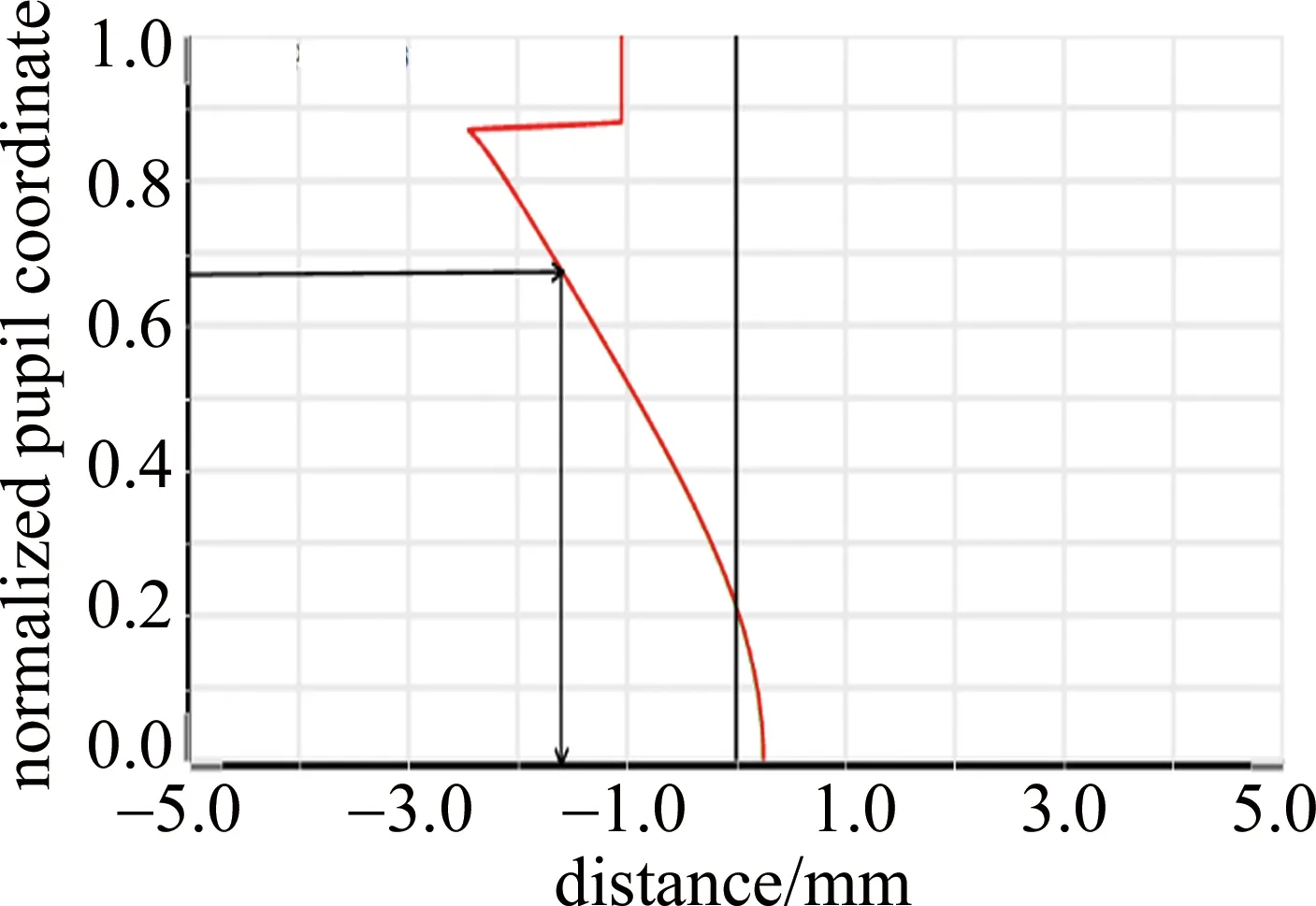
Fig.8 Spherical aberration distribution
在實驗過程中,為避免實驗出現偶然誤差,選取3組相同規格的LD TO-can和SMF,分別放在搭建的耦合平臺上進行光功率搜索,通過光功率計實時監控耦合功率,并讀取其最大功率記錄。經過后期數據處理,得到實際的最大耦合效率為51.46%。
對比仿真和實驗結果可以看出,理論的耦合效率與實際耦合效率存在約13%的誤差,主要原因有以下幾點:(1)透鏡的實際生產中不可能為理想球形,產生的球差相比較仿真系統中要大,這會導致光線匯聚更為分散,造成耦合效率減小;(2)系統仿真時,透鏡表面涂有一層抗反射膜,可以有效減少菲涅耳反射,提高耦合效率,實際試驗中球透鏡的鍍膜工藝存在限制,并不可能在表面鍍一層均勻完整的抗反射膜,因此會造成光線反射,減少通光量;(3)LD芯片發光功率不恒定,對耦合效率也存在影響。另外,在實際生產加工過程中,器件的貼片工藝、實驗平臺的精度以及算法的優良程度都對最大耦合效率產生一定的影響,綜合分析,實際與理論存在約13%的耦合誤差屬于可接受范圍。
3.2 容忍度比較分析
3.2.1 水平范圍容忍度分析比較 耦合效率隨x,y軸偏移量的變化如圖9所示。當角度偏差忽略不計且縱向距離位于最佳位置時,仿真與實驗耦合效率均隨x,y偏移量的增加而下降,且仿真耦合效率均高于實驗值。以耦合效率下降一定值時x,y方向偏移量的大小定義為x,y方向的容忍度,現以仿真結果為例進行定義說明(實驗結果的定義與仿真類似),即當耦合效率下降As時,若x,y方向偏移量分別為xs和ys,則x,y方向容忍度分別為xs和ys,如圖9所示。當仿真耦合效率As和實驗耦合效率Ae均為10%,即耦合效率下降10%時,仿真值xs和實驗值xe均為1.1μm左右,仿真值ys和實驗值ye均為1.5μm左右。x,y方向的容忍度有一定的差距,主要是因為LD的光束發散具有快軸和慢軸的區別,快軸的發散角要大于慢軸的發散角,因此在遠場形成的光斑只是類似于高斯光束的橢圓光斑,由此導致LD在與SMF的模場耦合中x,y方向的容忍度略有區別。通過圖9還可以看出:耦合效率對x,y方向的位移變化相當敏感,容許度非常小;當LD與SMF的相對位置達到了5μm時,耦合效率下降50%左右, 因此在做x,y方向的運動平臺選型時,首先要確保平臺的運動精度要在亞微米級別,

Fig.9 Planar offset vs. coupling efficiency
否則運動平臺的微小移動都會造成耦合效率的急劇降低,無法達到耦合要求。
3.2.2 縱向范圍容忍度分析比較 耦合效率隨z軸偏移量的變化如圖10所示。由圖可知,在保證角度偏差忽略不計且橫向(x,y軸)位置位于最佳時,仿真和實驗耦合效率隨z軸位移的變化趨勢基本相同。對比x,y軸容忍度可以發現:縱向(z軸)耦合效率對位移的敏感度遠不如橫向位移。當SMF與LD的距離增加或減少50μm(仿真值zs和實驗值ze分別為50μm),仿真耦合效率下降7%左右,即As≈7%,實驗耦合效率下降10%左右,即Ae≈10%,實際與理論存在3%左右的偏差,主要因為在耦合平臺裝配過程中,z軸與x,y方向并不能保證絕對的垂直,而是存在一定的角度偏轉,同時零件加工誤差也會對實驗耦合效率產生一定影響,導致理論與實際出現偏差,這種偏差在允許范圍內。通過縱向距離對耦合效率影響的分析發現,z軸運動平臺的精度達到微米級別就能完全滿足耦合要求。
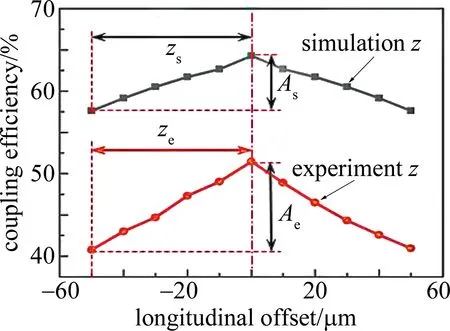
Fig.10 Longitudinal offset vs. coupling efficiency
3.2.3 角度旋轉范圍容忍度分析比較 目前所研究的2.5G BOSA,其SMF的結構是旋轉對稱的,且LD中未封裝隔離器,所以z方向角度的旋轉變化對耦合效率的影響很小,在此不作分析。為方便研究,現假設x,y,z方向處于最佳耦合位置,僅分析x,y方向偏轉對耦合效率的影響[19-22]。由圖11可知,仿真和實際驗
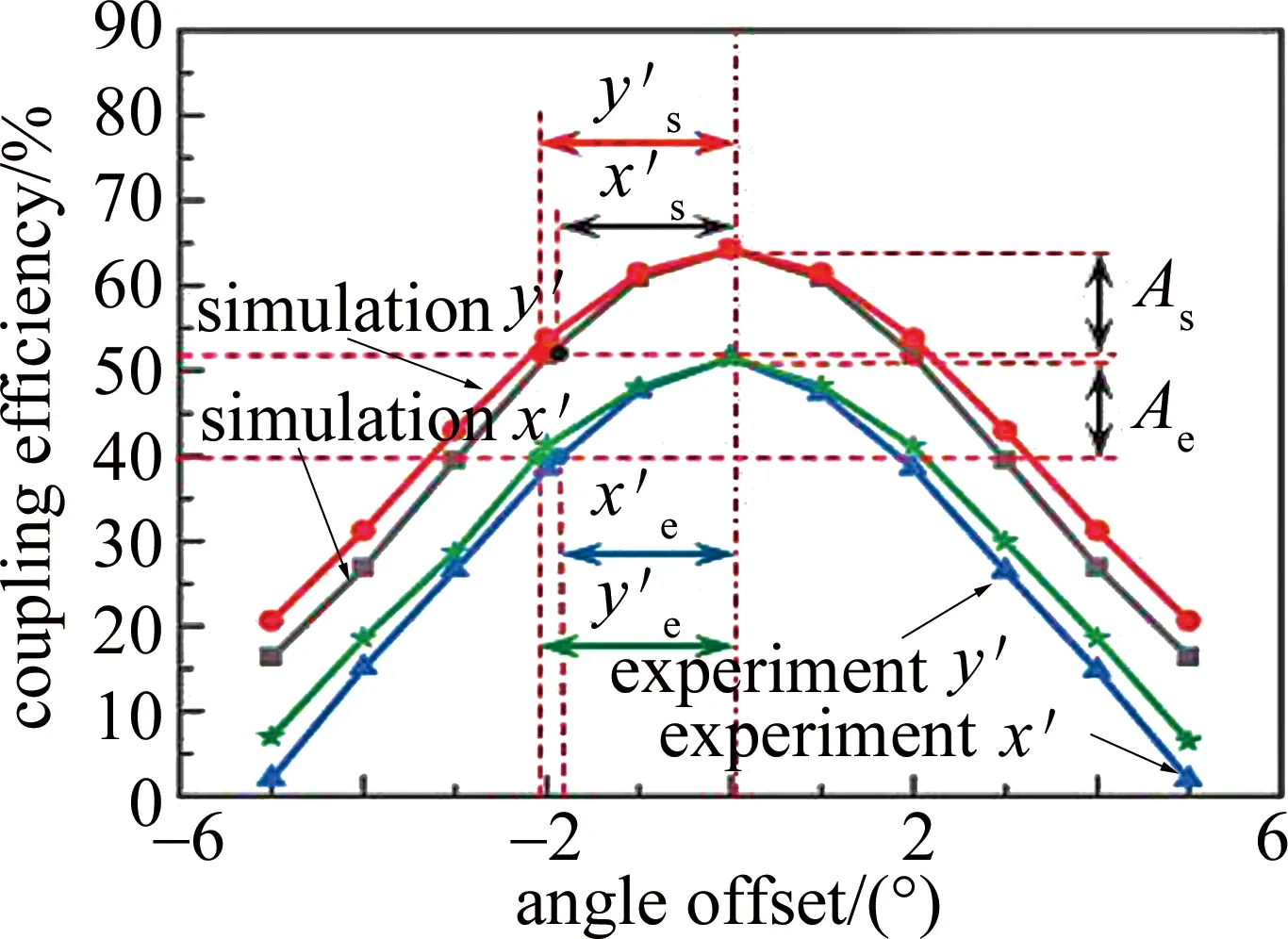
Fig.11 Angle offset vs. coupling efficiency

3.3 大縱橫比激光器對比實驗
選用較大縱橫比(豎直和水平方向發散角比值大于2)的半導體激光器進行對比實驗,其發散角為θ∥=15°,θ⊥=41.25°,得出激光器光束的束腰半徑為:w∥=3.1855μm,w⊥=9.108μm。仿真得到的最大耦合效率為34.44%,選取3組相同規格的LD TO-can和SMF進行耦合實驗,經過后期數據處理,得到實際的最大耦合效率為21.34%。分析原因可知:因為采用的激光器快軸和慢軸發散角差距較大,球透鏡的折射率是有限的,得到的光斑尺寸大于小縱橫比器件的光斑,光斑模場與光纖模場不匹配程度更高,從而導致耦合效率較低。在其它條件滿足最佳時,對x軸、y軸、z軸以及x′,y′角度進行一定量的偏移,得出其偏移量與耦合效率之間的關系如圖12所示。

通過對容忍度的分析發現,大縱橫比半導體激光器耦合時的容忍度要略高于小縱橫比半導體激光器,這是因為大縱橫比半導體激光器光束經過耦合之后在光纖端面形成的光斑尺寸更大,而光纖模場半徑尺寸是固定的,這就造成兩者之間耦合會有更大的容忍度。但是,大縱橫比半導體激光器的最大耦合效率遠低于小縱橫比半導體激光器的最大耦合效率;在光通信系統中,更大的耦合效率意味著更長的信號傳輸距離和更低的網絡搭建成本。因此,在耦合平臺的精度滿足要求的情況下,選擇小縱橫比半導體激光器進行器件的制造,更加具有優勢。
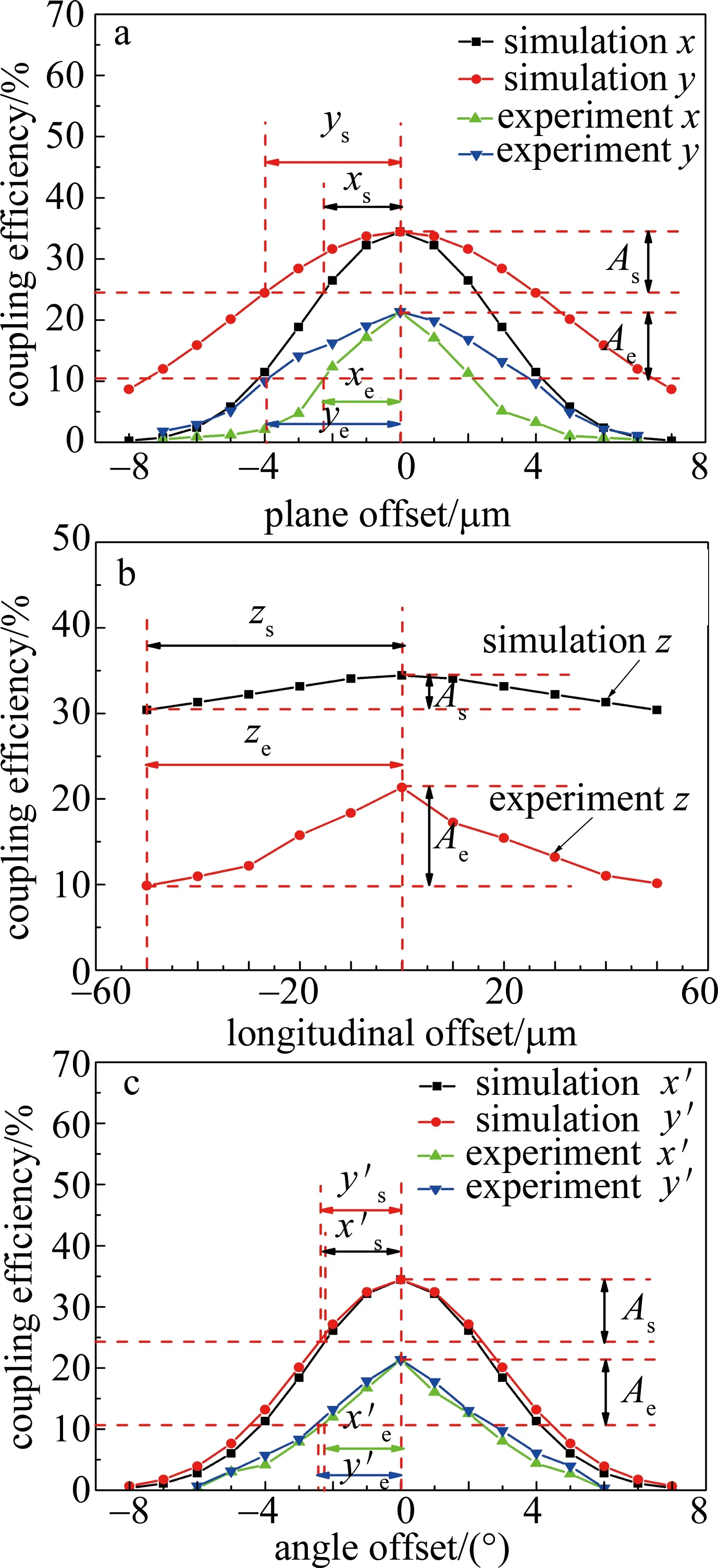
Fig.12 Planar offset vs. coupling efficiency
3.4 耦合流程優化
BOSA包括發射端和探測端,每一步流程都會對器件最終性能產生影響,本文中僅討論發射端耦合工藝流程。通過上述仿真與實驗研究可以發現,小縱橫比半導體激光器的耦合效率敏感度因子由大到小分別是:x軸、y軸位移的耦合效率敏感度因子>x′軸、y′軸角位移的耦合效率敏感度因子>z軸位移的耦合效率敏感度因子。因此,進行自動化耦合時,在保證一定的縱向高度和較小偏轉角度前提下,首先要進行平面范圍內的光功率搜索;在找到平面位置的最佳耦合點后,進行x′,y′的角度旋轉搜索,同時還要結合平面搜索,因為裝配誤差的存在,角位臺在旋轉時不可能保證LD剛好位于旋轉中心,旋轉時總會存在一定的橫向位移,進行平面搜索的目的是保證再次找回最佳平面耦合點;最后進行縱向范圍內的光功率搜索,因為裝配誤差的存在,此時同樣需要配合平面搜索才能找到整個系統的最佳耦合位置。
4 結 論
建立了同軸型半導體激光器與單模光纖的耦合模型,通過仿真比較分析了模型的耦合效率與各個方向位移敏感度的關系,并搭建自動耦合平臺研究了實際耦合過程中耦合效率與各個方向容忍度的關系,與仿真的結果進行比較,發現仿真與實驗的結果基本吻合;最后,對同軸型半導體激光器與單模光纖的耦合流程進行了優化。
(1)小縱橫比LD與SMF進行耦合,實際效率可達51.46%;水平面范圍內的位置變化對耦合效率的影響最為顯著,其次是LD與SMF的角度偏差,最后是LD與SMF之間的縱向距離。因此,LD-TO-can的封裝要盡量控制LD中心與透鏡中心在水平面的偏差,確保兩者中心位于同一軸線,以保證耦合效率。
(2)耦合封裝時在x,y方向選擇分辨率為0.1μm的運動平臺,x′,y′方向選擇分辨率為0.1°的運動平臺,z方向選擇分辨率為1μm的運動平臺可以基本保證LD和SMF的耦合精度,達到生產要求。
(3)耦合效率曲線存在明顯的峰值且變化敏感,容許度很小,這對耦合設備的穩定性提出了更高的要求,同時對后續的焊接封裝帶來極大挑戰。
(4)對比x,y發散角差異較大的大縱橫比半導體激光器,在耦合平臺精度滿足要求的情況下,采用小縱橫比的LD可以提高光電器件發射端的耦合效率,采用折射率漸變的透鏡可以有效減少球差造成的影響,提高耦合效率。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
商周刊(2017年9期)2017-08-22 02:57:49
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國衛生(2014年11期)2014-11-12 13:11:32